
Fターム[2F065AA21]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606)
Fターム[2F065AA21]の下位に属するFターム
Fターム[2F065AA21]に分類される特許
1 - 20 / 664
外観検査装置
同期されたユーザインタフェース機能を含むマシンビジョンシステムプログラム編集環境
距離計測システム
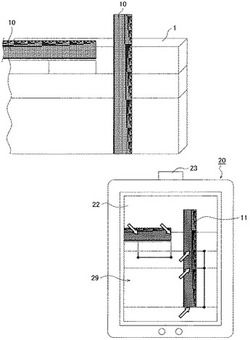
【課題】計測対象物に添付した計測用コードを撮像し、画面上に表示した計測コードの画像上の2点を指定することで、2点間の距離を計算し、画面上に表示する距離計測システムを提供する。
【解決手段】計測用コード10と、撮像手段23と、計測用ソフトウェア29、及び端末機20と、からなる距離計測システムであって、端末機20は、計測用ソフトウェア29をインストールされ、表示部22に撮像手段23によって、計測用コード10を測定物1に添付した状態を撮像して作製した画像データを表示し、計測用ソフトウェア29は、表示部22に表示された計測用コード10を判読し、画像データ中の計測用コード10に対して指定された間隔の距離値を算出することができ、距離値を、表示部22に表示された画像データに重ねて表示すること、及び計測用コード10は、一次元コード又は二次元コードからなる。
(もっと読む)
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム

【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境
【課題】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境を提供する。
【解決手段】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのためのマシンビジョンシステム編集環境が提供される。一形態では、新しい共通シンタックス及び表現が利用され、2つのステージで実行されるパートプログラムを実行し、そのような連続画像取得動作が通常動作と同じ方法で記録される。最初のステージでは、画像取得の連続ストリームを持つパートプログラムの一部が画像取得動作のためにスキャンされ、画像取得プロセスが開始された後に、画像を取得するために最も効果的な命令が決定される。そして、第2のステージでは、画像取得プロセスが実行されている間に、パートプログラムの一部が再度スキャンされ、そして画像解析動作が実行される。
(もっと読む)
マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法
【課題】マシンビジョンシステムのパートプログラム編集環境内で編集初期化ブロックを利用するシステム及び方法を提供する。
【解決手段】パートプログラムの編集初期化ブロックを定義及び利用する方法が提供される。パートプログラムは、一部を測定するための複数のステップを備え、編集インタフェースに表示される。編集インタフェースに、編集初期化ブロックに含めるステップを選択する選択肢が提供される。パートプログラムが保存された後に、編集のためにパートプログラムが呼び出されると、追加のステップがパートプログラムに追加される前に編集初期化ブロックが実行され得る。編集初期化ブロックにない初期パートプログラムステップによって取得されたデータの少なくともいくつかは、編集初期化ブロックを実行して決定されたデータに関連する推定データに基づいてもよい(例えば、基づいて変更されてもよい)。
(もっと読む)
リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境
【課題】リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境を提供する。
【解決手段】編集に現実的なコンテキストを生成するために、パートプログラムのすべての先行命令の実行を必要とせずに、前に保存されたデータを使用する代理データ動作が、特定の命令セットの実行に取って代わる。代理データは、パートプログラムに記録される動作の実際の実行中に保存し得る。実行の編集モードは、そのデータを代理と置換して、そのデータを生成するであろう動作を実行する。コンテキスト生成で大量の時間節約を達成し得、それにより、編集は動作コンテキスト内で行うことができ、動作コンテキストは略リアルタイムで正確性のために繰り返しリフレッシュし得る。これは、マシンビジョンシステムの固有のユーザインタフェースを使用して、比較的未熟なユーザによる都合のよいプログラム変更をサポートする。
(もっと読む)
目標位置検出装置、該検出装置に用いられる目標位置検出方法及び目標位置検出プログラム
【課題】夜間でも複数の目標対象物の捜索が可能な目標位置検出装置を提供する。
【解決手段】目標対象物位置特定手段(画像処理・座標演算装置21)により、画像記録部33に記録されている赤外画像iu、及びデータ記録部34に記録されているGPS/姿勢データfdが解析され、発熱物体が存在する位置が目標対象物の位置として特定される。この場合、画像処理・座標演算装置21により、赤外画像iu及びGPS/姿勢データfdに基づいて、各赤外画像iu上の発熱物体の座標位置を、赤外カメラ13の位置を基準とする方位ベクトル線に対応付けることにより、発熱物体に対して時系列の方位ベクトル線群が生成され、方位ベクトル線群を構成する各方位ベクトル線の共通部分が目標対象物の絶対座標(緯度、経度、及び高さ)として特定されて対象地点座標データedが出力される。
(もっと読む)
回転機ギャップ計測装置
【課題】画像処理により直接的にギャップを計測し、また、異常を検出した場合の保守作業員の目視による確認作業の手間を省くことを可能とする。
【解決手段】カメラ1で、照明器具2により照らされた回転機のギャップ14を撮影し、撮影した画像データは画像伝送器4によって電気信号から光信号に変換され、光ケーブル8を通り情報装置盤6内の画像伝送器5に送信される。送信された光信号は、画像伝送器5において電気信号に再び変換され、画像伝送器5から画像解析装置7に送信される。画像解析装置7では画像伝送器5から送信されてきた画像データを基にギャップ14の計測を行い、計測した情報はネットワーク13a経由で遠隔地にある監視装置13bへ送信される。これによって、監視装置13bにより確認することができる。
(もっと読む)
熱源位置角度検出方法
【課題】熱源の大きさが赤外線カメラ1画素の検出範囲よりはるかに小さな場合であっても、赤外線カメラの画素数を増やすことなくカメラから熱源までの位置角度を精度良く求める。
【解決手段】検出範囲の最も赤外線カメラから遠くにあり、1画素の検出範囲よりもはるかに小さな熱源であっても、赤外線カメラのレンズの焦点をずらし、3画素に赤外線が入射させ3画素が出力するデータの大小を比較することにより精度の高い熱源の角度検出を行う。
(もっと読む)
三次元表面検査装置および三次元表面検査方法
【課題】鏡面反射が酷い計測対象物であっても、簡単な構造により低コストで高精度かつ高速に表面の凹みや大きな疵などの三次元的欠陥を検査することが可能な三次元表面検査装置の提供。
【解決手段】計測対象物Xを撮影するカメラ装置3と、曲面状に配設されて計測対象物を覆うフィルタ膜と、フィルタ膜の曲面状に沿って周期的な強度分布を持つ曲面状強度分布のパターン光を投影し、フィルタ膜を介して計測対象物に投影する曲面パターン光投影手段5と、カメラ装置3により撮影された画像に対し、曲面状強度分布を直線状強度分布に変換するデコード処理を行うことで、計測対象物の表面の三次元的欠陥を検出する欠陥検出手段13とを含む。
(もっと読む)
切断面の検出方法
【課題】画像処理の負担を軽減し、容易かつ正確に切断面を区別することのできる、新規の切断面の検出方法を提供する。
【解決手段】第1の偏光フィルタ2の偏光方向2aを所定の方向に向けて第1の偏光フィルタ2の偏光方向2aと第2の偏光フィルタ4の偏光方向4aを直交させ、照明光1を第1の偏光フィルタ2を透過させ試料3の切断面3b,3cで反射させてから第2の偏光フィルタ4を透過させデジタルカメラ5により撮影して第1の画像を取得し、第1の偏光フィルタ2の偏光方向2aを所定の方向から45度傾かせて第2の画像を取得し、第1の偏光フィルタ2の偏光方向2aと第2の偏光フィルタ4の偏光方向4aを平行にして第3の画像を取得し、第1、第2、第3の画像を加算する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】所望の計測部分の幾何的な物理量を選択的にかつ容易に取得することが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】対象物画像データに基づいて対象物画像OIが表示されるとともに、指定画像データに基づいて対象物画像の特定部分に対応する計測部分指定画像AIが表示される。使用者による操作部の操作により、表示される計測部分指定画像AIが対象物画像OIに相対的に移動される。計測部分指定画像AIが対象物画像OIの特定部分に移動された場合、その特定部分に対応するように予め設定された計測対象物の計測部分の物理量が計測される。
(もっと読む)
エンジンボア表面傷の評価方法
【課題】スカッフィングを精度よく検出できるとともに、スカッフィングの大きさを定量的に評価できるエンジンボア表面傷の評価方法を提供する。
【解決手段】解析画像データ41を取得して、第一周波数スペクトル42を求める工程S10・S20と、フィルタリングした第一周波数スペクトル42を復元し、二次元凹凸データ45を生成するステップS30〜S50と、二次元凹凸データ45から第二周波数スペクトル46を求めるとともに、スカッフィングW3を検出するステップS60・S70と、二次元凹凸データ45から第三周波数スペクトル47を求めるとともに、フィルタリングした第二周波数スペクトル46を復元するステップS80〜S110と、復元した二次元凹凸データ49よりスカッフィングW3を評価するステップS120〜S150とを行う。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像から所望の領域を容易に抽出可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMが表示部260に表示される。使用者が初期画像IMにおいて抽出すべき領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域が抽出領域として決定される。使用者が初期画像IMにおいて抽出すべき他の領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域は、既に決定された抽出領域に加えられる。
(もっと読む)
3次元計測システム及び3次元計測方法
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
空隙量測定装置及び空隙量測定方法
【課題】着用物の種別に関わらず身体との間の空隙量を正確に測定することのできる空隙量測定装置及び空隙量測定方法を提供すること。
【解決手段】空隙量測定装置1は、人体模型20を載置する台座部12及び測定対象物に対してレーザー光を投光することで当該測定対象物までの距離を測定するセンサ部11を備える距離測定装置10と、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型20と、距離測定装置10が測定した距離から着用物と人体模型との間の空隙量を算出する演算装置30と、を備える。このとき、センサ部11は、人体模型20の内部から当該人体模型20に着用された着用物の着用面に対してレーザー光を投光することで着用面までの距離を測定し、演算装置30は、着用物の着用面までの距離から空隙量を算出する。
(もっと読む)
溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法
【課題】溶接ビード欠陥の検出精度を向上できる溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法を提供する。
【解決手段】溶接ビードの欠陥を検出する溶接ビード欠陥検出装置10であって、溶接モデルBLと平滑モデルSLとの比較、あるいは、平滑モデルSLと折線モデルVLとの比較、に基づいて、溶接モデルBLを、異常点と正常点とに分別する点群データ分別手段200と、異常点と、隣接する正常点間の距離と、に基づいて、溶接モデルBLを、欠落領域GGと非欠落領域GNとに分別する欠落領域分別手段300と、欠落領域GGまたは非欠落領域GNを順次併合して併合欠落領域GGGとする欠落領域併合手段400と、を具備する。
(もっと読む)
マシンビジョン検査システムおよびその位置測定結果の決定方法
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
大塊搬送物検知システム
【課題】大塊搬送物を好適に検知することが可能な大塊搬送物検知システムを提供する。
【解決手段】大塊ずり検知システム1は、ずり2を搬送するベルト12を有するベルトコンベア10と、ベルト12上のずり2に光を照射する照明部30と、光が照射されたずりを時間を空けて複数回撮影する撮影部40と、ずりに一方から光が照射された時刻t1に撮影された第一の画像とベルト12の走行によってずりに他方から光が照射された時刻t2(>t1)に撮影された第二の画像とに基づいて、大塊ずりを検知する大塊ずり検知部53bと、を備え、大塊ずり検知部53bは、ベルト12の速度をvとしたとき、v・(t2−t1)に基づいて第一の画像及び第二の画像の位置合わせを行って第一の画像及び第二の画像の論理積画像を生成し、論理積画像から大塊ずりを検知する。
(もっと読む)
1 - 20 / 664
[ Back to top ]