
Fターム[2F065AA25]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 長さ;径;間隙;深さ (3,606) | 段差;深さ (264)
Fターム[2F065AA25]に分類される特許
1 - 20 / 264
表面処理状況モニタリング装置
膜材料の欠陥の光学的観察方法および装置
トレンチ深さ測定装置及びトレンチ深さ測定方法並びに共焦点顕微鏡
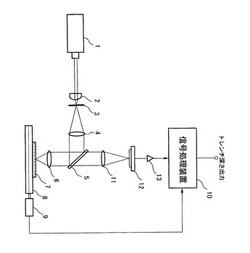
【課題】トレンチ幅が照明光の波長と同程度の高アスペクト比のトレンチの深さを測定できるトレンチ深さ測定装置を実現する。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
(もっと読む)
基板の凹部の検査方法および基板のレジスト膜の検査方法

【課題】有底の凹部の状態を非破壊で検査し、製造コストを低減させる。
【解決手段】本発明のウエハ50のビア孔51の検査方法は、有底のビア孔51が表面に形成されたウエハ50に被転写材料を塗布し、この被転写材料をビア孔51内に充填させ、被転写材料を硬化させた後、ウエハ50から離型させることでビア孔51がビア像71として転写されてなる被転写体70を形成する転写工程と、ビア像71の表面を観察することでその表面形状の画像データを作成する表面観察工程と、ビア像71の画像データに基づいてビア像71の形状を評価し、ビア孔51内の状態を検査する検査工程とを備えたところに特徴を有する。
(もっと読む)
形状測定装置
【課題】毛髪表面の断面形状(表面輪郭形状)、毛髪表面の段差を高精度に測定できる形状測定装置の実現。
【解決手段】測定すべき毛髪に向けて走査ビームを投射する対物レンズ13を含み、毛髪からの反射光を受光して毛髪表面の共焦点画像を撮像する共焦撮像装置と、複数の毛髪を、その長手軸線方向であるX軸方向に支持すると共にX軸と直交するY軸方向そって所定の間隔で整列支持する毛髪支持手段15と、X軸方向及びY軸方向に移動可能で、前記毛髪支持手段を支持するステージ14とその駆動手段と、対物レンズとステージとの間の相対距離を変化させる手段16と、共焦点撮像装置から出力される画像信号に基づき、毛髪表面の断面画像情報及び/又は毛髪表面に存在する段差の大きさを示す段差情報を出力する信号処理装置10とを有する。ステージは、測定される毛髪の本数及び測定点の座標情報に基づき、ジグザグ状に設定された移動経路に沿って移動する。
(もっと読む)
計測装置及び計測方法
【課題】参照面と被検面との間の距離の計測において、計測範囲の広範囲化の技術を提供する。
【解決手段】光源からの第1光を参照面に入射させ第2光を被検面に入射させる分割素子と、前記参照面で反射された前記第1光と前記被検面で反射された前記第2光との干渉光の位相をシフトさせる位相シフト部と、前記干渉光の強度を検出する検出部と、前記光源からの光の周波数を連続的に3つ以上の周波数に設定し前記3つ以上の周波数のそれぞれについて前記干渉光の位相をシフトさせながら前記干渉光の強度を検出するように前記検出部を制御し検出される前記干渉光の強度及び前記位相シフト部による前記干渉光の位相のシフト量に基づいて、前記参照面と前記被検面との間の光路長に相当する位相を特定し前記参照面と前記被検面との距離を求める処理部と前記処理部は前記3つ以上の周波数のそれぞれの間の周波数差が互いに異なるように前記3つ以上の周波数を設定する。
(もっと読む)
移動環境認識装置及び方法
【課題】高精度に測定対象の形状認識情報を得る。
【解決手段】測定対象までの距離画像データを得る距離画像測定工程ステップST1と、この距離画像測定工程で得た距離画像データに基づき、所定のデータの集合体からなるラベリング領域を作成するラベリング処理工程ステップST2〜ステップST7と、このラベリング処理工程で作成した複数のラベリング領域に基づいて複数の上面データを形成する上面データ形成工程ステップST8と、この上面データ形成工程で形成した複数の上面データに基づいて測定対象の形状を認識する形状認識工程ステップST9〜ステップST13と、を備えた移動環境認識方法である。
(もっと読む)
ケーブルの片撚り検出方法
【課題】インラインで連続的に正確な検出が行え、また非接触にもかかわらずコストの増加の少ないケーブルの片撚り検出方法を提供する。
【解決手段】一対のコア10a,10bを移動させながら対撚りしてケーブル11を作製する際にインラインで連続的に片撚りを検出するケーブルの片撚り検出方法であって、ケーブル11における対撚りの山12の高さを光透過型光電センサ13a,13bで非接触にて検出することにより対撚り周期を求め、その対撚り周期の変化に基づいて片撚りの発生を検出するものである。
(もっと読む)
平面度測定方法
【課題】測定対象物の表面の平面度を精度良く求めることができる平面度測定方法を提供する。
【解決手段】平面度測定方法は、レーザ変位計を含むレーザ測定装置が、レーザ光を走査しながら、複数の位置における前記測定対象物の表面と測定基準面とする液面との間の、前記レーザ光の照射方向における距離の情報を測定して取り込む。この後、前記レーザ変位計が測定した複数の位置における前記距離の情報と、前記レーザ変位計が走査した前記複数の位置の位置情報をコンピュータが取り込む。前記コンピュータは、測定した前記位置それぞれにおける前記位置情報と前記距離の情報を座標として表した測定データを、座標空間上の点で表したとき、前記点すべてが2つの平行平面の間に挟まれ、かつ前記2つの平行平面の間の距離が最小となる目標平行平面を、前記2つの平行平面の傾きを変えながら探索することにより、前記平面度を算出する。
(もっと読む)
回転式レーザー測定装置
【課題】コンクリート壁等測定対象面の状態(凹凸量)を装置により自動的に、かつ精度良く測定できるようにする。
【解決手段】回転式レーザー測定装置は、レーザー光によって距離を測定する距離センサと、該距離センサを軸方向に駆動する第1の駆動手段と、同距離センサを軸周り方向に駆動する第2の駆動手段と、これら第1,第2の駆動手段を駆動制御する駆動制御手段とを備え、上記距離センサを測定対象面の長手方向と直交する面に沿って回転可能に支持するとともに、上記測定対象面の長手方向に沿って所定ピッチ毎に移動可能とし、該所定ピッチ毎に上記距離センサを移動させ、かつ所定の角度回転させながら、測定対象面の状態を自動的に測定して行くようにした。このような構成によると、自動的かつ容易に、しかも正確に凹凸その他の表面状態を測定して行くことができるようになる。
(もっと読む)
刻印装置
【課題】刻印試験を短時間で行うこと。
【解決手段】刻印装置1は、鋼片製品を固定する製品固定部2と、刻印試験を行うための鋼片製品と同種の鋼片試料を固定する試料固定部3と、製品固定部2および試料固定部3にそれぞれ固定された鋼片製品および鋼片試料に刻印ピン4bを押圧することによって鋼片製品および鋼片試料の表面に刻印を付与する刻印付与部4と、を備える。このような構成によれば、刻印試験を行う際、製造ラインに製品が搬送されてくるまで待機する必要がなくなるので、刻印試験を短時間で行うことができる。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
光学計測装置
【課題】本発明は、ヘッド部を大型化することなく、コントローラ部に対してヘッド部を交換することが可能なように互換性を持たせることができる光学計測装置を提供する。
【解決手段】本発明に従った光学計測装置では、計測対象物200に対して光を用いて計測を行ない、ヘッド部10と、コントローラ部20と、光ファイバ11と、記憶部40とを備えている。本発明に従った光学計測装置では、ヘッド部10とコントローラ部20とを光ファイバ11で接続する。記憶部40は、製造されるヘッド部10のそれぞれの個体に対して関係付けられ、コントローラ部20で行なう演算に必要な情報をヘッド部10の個体情報として記憶する。コントローラ部20は、コントローラ部20に対して物理的に独立して存在する記憶部40から個体情報を読出し、読出した個体情報を用いて演算を行なう。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置のギャップ制御方法、及び表示用パネル基板の製造方法
【課題】基板の一面を複数のショットに分けて露光する際、ショット毎に、マスクと基板とがより平行な状態でギャップ合わせを行って、露光精度を向上させる。
【解決手段】マスクホルダ20とチャック10とを相対的にZ方向へ移動及びチルトする複数のZ−チルト機構30と、マスク2と基板1とのギャップを複数箇所で測定する複数のギャップセンサー30とを設ける。予め露光した基板のパターンを測定して、各ギャップセンサー40の測定点におけるショット毎のオフセット値を決める。ショット毎に、各ギャップセンサー40の測定値を、各測定点におけるショット毎のオフセット値で補正し、補正後の補正値に基づいて、複数のZ−チルト機構30によりマスク2と基板1とのギャップ合わせを行う。
(もっと読む)
エッチングモニタリング装置
【課題】エッチング実行中にレジスト膜厚の影響を除去し、高い精度で孔深さや段差を算出する。
【解決手段】所定波長幅の光を試料50に照射して、孔52の底面や基板51上面等で反射する光の干渉を含む光を分光ユニット25により分光検出する。データ処理部30では分光スペクトルから光源21の発光スペクトルの影響等を除去した干渉スペクトルを求め、これをフーリエ変換して得られるピークの間隔から孔深さや膜厚等を算出する。チョッパ103は外部参照面104で反射した外部参照光を周期的に遮断・通過させるため、データ処理部30では外部参照光ありのデータとなしのデータとが得られる。例えば、レジスト層53が厚い間は、より高分解能である外部参照光なしのデータに基づいて孔深さ等を算出し、エッチングが進行してレジスト層53が薄くなると、外乱の影響を受けにくい外部参照光ありのデータに基づいて孔深さ等を算出する。
(もっと読む)
欠陥計測方法
【課題】光学素子の欠陥を簡便に発見、測定することのできる欠陥計測方法を提供する。
【解決手段】第一の観点に係る欠陥計測方法は、測定対象に光源から光を照射し、収束光にして測定対象に入射し、測定対象又は光源を、収束光の焦点が測定対象の一方の面から他方の面に至るまで移動させ、測定対象の一方の面と測定対象中に存在した欠陥との間の距離を計測し、距離に測定対象の屈折率を乗じた値を求め、一方の面からの前記欠陥の深さを計算する。
(もっと読む)
3次元計測装置と3次元計測方法
【課題】ライン光が撮影手段に向けて正反射されることがなく、撮影が困難になることを防止する。
【解決手段】被検査体1にライン光4を照射して両者を相対移動させながら撮影手段26で撮影することにより、光切断法によって被検査体1を3次元計測することができる。上記被検査体1は、ワークに予め定められた配列方向Aに配列して設けられた複数の凹凸状部分3を有しており、この凹凸状部分3は、上記配列方向Aと直交する方向の直線部分3aを有している。上記ライン光4の相対移動方向Bと、この相対移動方向に対するライン光の角度θとは、該ライン光4が上記直線部分3aに対して斜めに交差して照射されながら相対移動されるように予め設定されている。
(もっと読む)
基板検査装置および基板検査方法
【課題】基板に形成された凹部の形状を、非破壊、非接触にて検査する技術を提供する。
【解決手段】基板検査装置100は貫通ビアWH(凹部)が形成されている基板Wを検査する。基板検査装置100は、ポンプ光の照射に応じて、基板Wに向けてテラヘルツ波を照射する照射部12と、プローブ光の照射に応じて、基板Wを透過したテラヘルツ波の電場強度を検出する検出部13と、テラヘルツ波が基板Wの貫通ビア形成領域を透過する透過時間と平坦領域を透過する透過時間との時間差を取得する時間差取得部24と、該時間差に基づいて貫通ビアWHの深度を算出するビア深度算出部26とを備える。また、基板検査装置100は、ビア深度算出部26により算出した貫通ビアWHの算出深度と、干渉法を利用する深度測定装置16によって測定した貫通ビアWHの実測深度とに基づいて、貫通ビアWHの形状を示す形状指標値を取得する形状指標取得部27を備える。
(もっと読む)
3次元形状測定方法及び装置並びに3次元形状測定用顕微鏡装置
【課題】段差部を有する鏡面反射性物体の形状を高精度に測定することが可能な3次元形
状測定方法及び装置並びに3次元形状測定用顕微鏡装置を提供する。
【解決手段】デフレクトメトリの手法を用いて被検面4の局所スロープ情報及び形状情報
を求めた後、投影光学系2による面光源1の共役位置3が記被検面4上に位置するように
設定するとともに、開口絞り22の絞り半径を小さくして、面光源像を被検面4に投影す
る。観察光学系5により観察される面光源画像における歪情報と、先に求めた局所スロー
プ情報及び形状情報に基づき、被検面が有する段差部の段差量情報を求め、その段差量情
報に基づき形状情報を補正する。
(もっと読む)
走査型白色干渉計による試料の表面形状の測定方法
【課題】試料の表面形状の測定精度を大幅に向上させることのできる、走査型白色干渉計による試料の表面形状の測定方法を提供する。
【解決手段】対物レンズの下にビームスプリッター及びミラーを配し、試料表面を含めて、マイケルソン型などの干渉計を構成し、試料までの距離又はミラーまでの距離をピエゾアクチュエーターで走査し、それによりできる干渉波形をCCDカメラで撮影して動画ファイルデータとして記録し、データ収集間隔をナイキスト間隔(干渉波形の周期の1/2)よりも広く取って試料の表面形状を測定する、走査型白色干渉計による試料の表面形状の測定方法において、得られた収集波形についてヒルベルト変換を行い、包絡線と位相を得、こうして得られた位相が0になる走査位置と試料の表面高さとの関係を用いて位相が0になる走査位置から試料表面の高さを算出する。
(もっと読む)
1 - 20 / 264
[ Back to top ]