
Fターム[2F065AA31]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 角度;姿勢 (2,368)
Fターム[2F065AA31]の下位に属するFターム
2直線のなす角度 (102)
2平面のなす角度 (40)
交点、交線を延長によって求めるもの (4)
面の方向;面法線の方向 (294)
テーパ角 (16)
物体の姿勢 (755)
回転角 (292)
Fターム[2F065AA31]に分類される特許
1 - 20 / 865
三次元座標測定装置、三次元座標測定方法、及びプログラム
測位システム、測位方法、及びプログラム
転写装置、アライメント方法および転写方法
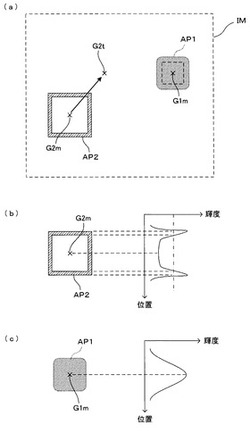
【課題】担持体および基板のそれぞれに形成されたアライメントマークの両方に同時に撮像手段のピントを合わせることができない場合であっても、担持体と基板との位置合わせを高精度に行う。
【解決手段】透明なブランケットを介してCCDカメラで撮像された画像IMから、基板側のアライメントパターンAP1およびブランケット側のアライメントパターンAP2それぞれの重心位置G1mおよびG2mを画像処理により求める。ブランケット側のアライメントパターンAP2については、ピントが合った状態で撮像された画像からエッジ抽出を伴う処理により重心G2mの位置を特定する。ピントが合わず輪郭がぼやけた状態で撮像された基板側のアライメントパターンAP1については、高い空間周波数成分を除去して低周波成分を抽出し、その結果から重心G1mの位置を特定する。
(もっと読む)
レーザ照射位置の補正方法、及び、レーザ加工装置

【課題】レーザ加工装置の出荷後再立ち上げにおけるレーザ照射位置の精度の悪化に対して、簡単な測定で精度悪化の傾向を定量把握して最終的に精度の高い補正を行うことが可能とするレーザ照射位置の補正方法が求められていた。
【解決手段】複数の加工エリアに分けて加工を行うレーザ加工装置において、加工エリアごとに対角線上に等間隔に並ぶ試験加工点を複数ヶ所設定し、予め設定された第一の補正データに基づく補正を施して試験加工点を加工するステップと、試験加工点の実際に加工された位置を測定するステップと、加工しようとする位置と実際に加工された位置の平面上のズレ量を直交する二軸で算出するステップと、加工エリアごとに、ズレ量のシフト成分と傾き成分を二軸ごとに算出するステップと、シフト成分と傾き成分をキャンセルするように算出された各加工エリアごとの補正情報を第一の補正データに加味し第二の補正データとする。
(もっと読む)
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置
【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
画像処理装置および画像処理方法
【課題】光沢が含まれる画像部分が形状生成に用いられず有効利用されない。
【解決手段】多視点で撮影した画像データから多視点画像間での対応領域を検出して被写体の三次元形状データを生成する。そして、対応領域のうち光沢のある光沢画像領域を示す光沢領域データを生成して、多視点画像データの光源の特性データを生成する。
(もっと読む)
画像測定装置
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
3次元座標取得装置、カメラ姿勢推定装置、プログラム
【課題】カメラ姿勢の推定精度を向上させるとともに、処理負荷を軽減させる。
【解決手段】3次元座標取得装置100は、カメラによって撮像された立体対象物の撮像画像から当該カメラのカメラ姿勢を推定する際に用いられる前記立体対象物の3次元座標を取得する3次元座標取得装置であって、前記撮像画像から、画像平面内の特徴点を検出する特徴点検出部111と、前記カメラの焦点及び前記画像平面内の特徴点を通過する直線の方程式と、前記立体対象物の方程式とから、前記直線と前記立体対象物との交点を算出し、前記特徴点の3次元座標として取得する3次元座標取得部113とを備える。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】所望の計測部分の幾何的な物理量を選択的にかつ容易に取得することが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】対象物画像データに基づいて対象物画像OIが表示されるとともに、指定画像データに基づいて対象物画像の特定部分に対応する計測部分指定画像AIが表示される。使用者による操作部の操作により、表示される計測部分指定画像AIが対象物画像OIに相対的に移動される。計測部分指定画像AIが対象物画像OIの特定部分に移動された場合、その特定部分に対応するように予め設定された計測対象物の計測部分の物理量が計測される。
(もっと読む)
乾式ガスホルダーのピストンの監視方法および監視装置
【課題】乾式ガスホルダーに関し、ピストンの傾斜のみならず偏心も監視するための方法および装置を提供する。
【解決手段】筒状のホルダー本体2と、ホルダー本体内に配置された落し蓋状のピストン3と、ピストンとホルダー本体との隙間のシール機構4を具える乾式ガスホルダー1の、ピストンの監視方法において、ピストンの中心位置に偏心量測定テーブル5を設け、ホルダー本体の上端部に、偏心量測定テーブルおよびその近傍並びにその中心位置を含みまたは含まずに互いに多角形を形成する他の複数位置までの高さ方向距離を非接触でそれぞれ計測する距離計6を設け、中心位置の偏心量測定テーブルまでの高さ方向距離に急激な変化が生じた場合にピストンに偏心が生じたと判断し、その高さ方向距離の変化がないか穏やかな場合は、距離計で計測した多角形を形成する複数位置までの高さ方向距離に基づきピストンに傾斜が生じたか否かを判断する。
(もっと読む)
露光装置、及びデバイス製造方法
【課題】移動体の位置情報を精度良く計測できる位置計測装置を提供する。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である。
(もっと読む)
微小角変位測定方法と装置
【課題】簡単な構造で、数十ナノラジアン以下の微小角変位を測定可能な微小角変位測定方法と装置を提供する。
【解決手段】レーザ光源12と、レーザ光源12からのレーザ光Lを収束又は発散させるレンズ18と、レーザ光Lを分岐させる偏光ビームスプリッタ20と1/4波長板22を有する。測定対象面24で反射したレーザ光Lが、臨界角直前の角度で臨界面26aに入射する臨界角プリズム26を備える。臨界角プリズム26の臨界面26aで反射したレーザ光Lが入射する一方の画像センサ30と、臨界角プリズム26の臨界面26aを透過したレーザ光Lが入射する他方の画像センサ32とを備える。各画像センサ30,32の各画素の出力を基に、測定対象面24の微小角変位を演算する微小角変位演算手段であるコンピュータ34を備える。臨界角プリズム26に入射するレーザ光Lを分割するビームスプリッタを設けても良い。
(もっと読む)
計測装置及び電気的装置
【課題】光学センサを用いて用紙搬送量を正確に特定する。
【解決手段】画像形成装置は、記録ヘッドを搭載するキャリッジを主走査方向に搬送し、用紙を搬送ローラを通じて主走査方向とは垂直な副走査方向に搬送する。この画像形成装置は、キャリッジの静止状態で、用紙搬送方向に平行な第一の検出方向への用紙移動量及びキャリッジ搬送方向に平行な第二の検出方向への用紙移動量を検出可能な光学センサを備える。キャリッジに固定された光学センサは、キャリッジの移動に伴って、キャリッジと共に傾くため、本装置では、リニアエンコーダを用いて検出したキャリッジ位置、ロータリエンコーダを用いて検出した搬送ローラ回転量、及び、光学センサの検出値を用いて、光学センサの傾き(角度θ)を算出する(S270)。そして、用紙搬送中にキャリッジが搬送される際には、光学センサにより検出された第一の検出方向の用紙移動量を上記角度θに基づいて補正する。
(もっと読む)
スキージ観察装置及びスキージ観察方法
【課題】基板上にソルダーペーストを印刷するスキージのスキージング中における撓り状態を、精度良く検証することの可能な技術を提供する。
【解決手段】透明な平板材と、平板材の上面に接するようにスキージを保持し、スキージを平板材の上面に沿ってスキージングさせるスキージ駆動手段と、平板材の下方に配置されており、スキージング中のスキージを、平板材を透して撮像する撮像手段と、を備える。スキージのうち、スキージング中の進行方向側に面するスキージ面には、スキージの撓りに応じて変形する所定の模様が設けられている。
(もっと読む)
露光装置及びデバイス製造方法
【課題】 遮光位置のずれを低減する技術の提供。
【解決手段】 原版を光で照明する照明系、前記原版のパターンの像を基板に投影する投影系を有する光学系を備える露光装置で、前記光学系の光路上の前記投影系の物体面と共役な面かその近傍に配置され、前記像が前記基板上に投影される領域の外縁の一部を円弧状に規定する円弧状部を有する遮光板と、前記光学系の光路に沿った回転軸まわりに前記遮光板を回転駆動する回転駆動部と、前記回転軸と交わる方向に前記遮光板をシフトするシフト駆動部と、前記回転駆動部により前記遮光板を回転駆動させ、前記光学系により前記像を前記基板に投影する際の基準となる基準軸と前記回転軸との相対位置の情報を取得する取得部と、前記基板の周辺部に対して前記像を投影する場合、取得した前記相対位置に関する情報に基づき、前記遮光板が所定の位置になるように前記回転駆動部と前記シフト駆動部を制御する制御部を有する。
(もっと読む)
金属板の外観評価方法
【課題】研磨部及び再研磨部の仕上がり具合を簡単な手法で定量的に評価できる金属板の外観評価方法を提供する。
【解決手段】この金属板の外観評価方法では、金属板1の表面のデジタル画像10をスキャナ4によって取得し、デジタル画像10の一部画像11に含まれる各ピクセルのRGB値をグレースケール変換して得られるAc値の波形パターンに基づいて研磨部2及び再研磨部3の外観の可否を判断する。波形パターンを用いることで、研磨部2及び再研磨部3の外観を容易かつ定量的に判断できる。また、この方法では、波形パターンに基づいて、研磨部2及び再研磨部3の研磨方向がスキャナ4の走査方向と一致しているデジタル画像10を判断対象として選別する。この前処理により、外観判断工程で用いる波形パターンのS/N比が向上し、判断精度が高められる。
(もっと読む)
移動体駆動方法及び移動体駆動システム、パターン形成方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】複数のZヘッドを切り換えながら、移動体の高さと傾斜を継続的に計測することにより、移動体を高精度で駆動する。
【解決手段】制御装置は、テーブルWTBの±X端部に設置された反射面39Y1,39Y2上に位置する2つのZヘッドZsR,ZsLを用いて、テーブルWTBの高さと傾斜を計測する。テーブルWTBのXY位置に従って、使用するZヘッドをZsR,ZsLからZsR’,ZsL(あるいはZsR,ZsL’)に切り換える。制御装置は、切り換えの際、座標つなぎ法を適用して、新たに使用するZヘッドZsR’(あるいはZsL’)の初期値を設定する。これにより、テーブルのXY位置に応じて使用するZヘッドが逐次切り換えられるにもかかわらず、切り換えの前後でテーブルの高さと傾斜の計測結果が保存され、テーブルを高精度で駆動することが可能になる。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
半導体レーザ素子の端面角度測定方法
【課題】半導体レーザ素子の共振端面の角度を容易に且つ精度良く測定することができる方法を提供する。
【解決手段】光導波路の光導波方向と交差する方向に並んだ複数の半導体レーザ素子を含む半導体レーザバー2を、共振端面2aが所定の基準線21bに沿うようにステージ21の基準面21a上に固定し、半導体レーザバー2の複数の半導体レーザ素子の共振端面からレーザ光Laを出射させ、レーザ光LaのFFPを測定し、FFPのピーク位置により定まるレーザ光Laの出射方向と、所定の基準線21b及び基準面21aとの相対角度から、半導体レーザ素子の共振端面の角度を算出する。
(もっと読む)
1 - 20 / 865
[ Back to top ]