
Fターム[2F065AA46]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 形状パラメータ (484) | 曲率;曲率半径;曲がり (170)
Fターム[2F065AA46]に分類される特許
1 - 20 / 170
鋼管の外面曲がり測定方法
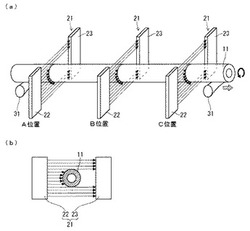
【課題】搬送される鋼管が跳ねた場合や楕円または外径の変動が鋼管に生じている場合も正確に測定できるとともに、工数を増大させることなく測定間隔を短くして定量的に測定できる外面曲がりの測定方法を提供する。
【解決手段】複数のローラ31によって鋼管11をその周方向に回転させつつ長手方向に搬送し、ローラ31のうちで隣り合うローラ31の間に鋼管外面の上端および下端の位置を検出する検出器21を等間隔に3台配置し、検出器21で検出した上端および下端の位置から鋼管外面の中心位置を3台の検出器についてそれぞれ求め、下記(1)式により振れwを算出すること特徴とする鋼管の外面曲がり測定方法である。ここで、3台の検出器21のうちで上流側(A位置)での中心位置をCA、中央(B位置)での中心位置をCB、下流側(C位置)での中心位置をCCとする。
w=CB−(CA+CC)/2 ・・・(1)
(もっと読む)
光学式センサ

【課題】複数の検出用導光部材に光を好適に分配し得る光学式センサを提供する。
【解決手段】光学式センサは、光源10と、光源10に光学的に結合された光ファイバー20と、光ファイバー束40と、光ファイバー20から光ファイバー束40に光を分配する光分配部30と、光ファイバー束40によって導光された光を分離して検出する光分離検出器50を有している。光ファイバー束40は、複数の光ファイバー41A,41B,41C,41D,41E,41Fを有している。光ファイバー41A〜41Fは、それぞれ、物理化学状態に応じて光学特性が変化する特性検出部42A,42B,42C,42D,42E,42Fを有している。
(もっと読む)
曲げ加工装置及び曲げ加工方法
【課題】高精度な曲げ加工を可能にする。
【解決手段】1対のダイ401、402上に被加工物220を載置し、パンチ302の押し込み量に応じた負荷を被加工物220の複数の曲げ加工位置に加えることによって被加工物220を所定形状に曲げ加工する際に、被加工物220の形状に関連するデータを光学式測定装置本体100で測定し、記憶部910に記憶した被加工物220の目標曲げ量を参照して、前記測定した形状に関連するデータに基づいて次回の曲げ加工におけるパンチ302の押し込み量を決定し、パンチ駆動部3が次回の曲げ加工においてパンチ302が前記押し込み量に対応する負荷を被加工物220へ加えるように処理部が制御する。
(もっと読む)
管の内面曲がり測定装置およびそれを用いた測定方法
【課題】管の内面曲がりを定量的に測定できるとともに、様々な内径の鋼管に対応できる管の内面曲がり測定装置およびそれを用いた測定方法を提供する。
【解決手段】被測定材である管の長手方向に移動可能なヘッド21と、ヘッド21によって管10の周方向に揺動可能に支持され、管10の内面までの距離を測定する第1距離計22と、管10の長手方向におけるヘッド21の位置を測定する第2距離計(図示なし)と、ヘッド21の移動および第1距離計22の揺動を制御する制御手段とを備えることを特徴とする管の内面曲がり測定装置20である。本発明では、内面曲がり測定装置20が管10の長手方向に垂直な面におけるヘッド21の変位を測定する変位計を備え、ヘッド21を、管10を長手方向を水平にした状態で該管の内面上を走行する走行機構、および、第1距離計22の揺動軸を水平に維持する維持機構を有する走行装置に設けるのが好ましい。
(もっと読む)
光ファイバの曲率の測定方法
【課題】光ファイバの長手方向の曲率変動を容易かつ高精度に測定する方法を提供する。
【解決手段】光ファイバ1の一端を回転可能に把持し、該光ファイバ1の軸方向側面上の所定長離れた2点に対して、該軸方向にほぼ垂直かつ互いに平行な2本のビーム光線6を照射し、前記側面上で散乱した2つの散乱反射光7のそれぞれの代表位置を、該光ファイバ軸と平行な軸上の座標位置として計測し、得られた2つの座標位置の差分を求め、次いで、該光ファイバ1を所定角度回転させ、同様の操作を行って2つの座標位置の差分を求める操作を複数回繰返し、得られたそれぞれの角度での差分から正の値を取る振幅SAの代表値を求め、さらに振幅SAから曲率を求め、これを第1の光ファイバ長手位置の第1の曲率とし、さらに、光ファイバ1の長手方向にビーム光線を照射する位置を変え、同様の処理を複数回繰り返して前記第1から第mまでの曲率を求める。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
ファイバーセンサー
【課題】コアを傷つけることが少なくクラッドを容易に加工し得る光ファイバーを備えたファイバーセンサーを提供する。
【解決手段】ファイバーセンサーの光ファイバー30は、光を導光し得るコア42と、コア42の周囲にコア42に接して配置されたクラッド44を有している。光ファイバー30は、コア42によって導光される光を光ファイバー30の曲がり量に応じて損失させる導光損失部50を有している。導光損失部50は、クラッド44に形成された開口44a内に位置しているコア42の表面で構成され得る。コア42は、クラッド44に比べて、クラッド44の開口44aを形成する加工に対して高い耐性を有している。
(もっと読む)
光学式測定装置、プレス機、部品組合せ方法
【課題】小型化可能で高精度な形状測定が可能な光学式測定装置を提供する。
【解決手段】レーザ光源201が出力したビーム状の測定用光216は第2円錐ミラー207によって放射状の測定用光に変換され、ケース101の第2開口部102を通って出力された後、測定対象物220で反射され、第1開口部103を通ってケース101内へ入り、第1円錐ミラー209によって反射された後、受光レンズ213を介して光検出素子214で検出される。処理部240は、光検出素子214で検出された測定用光に基づいて測定対象物の形状を算出する。
(もっと読む)
路面画像処理システム及び路面画像処理方法
【課題】ラインカメラの画像からラインカメラの視野範囲が移動した軌跡を特定し、路面全体の画像を正確に生成することが可能な技術を提供する。
【解決手段】本発明の路面画像処理システムは、車両と、車両に搭載されており、一方向に長い第1視野範囲内の路面を撮影する第1ラインカメラと、車両に搭載されており、一方向に長く、第1視野範囲と交差する第2視野範囲内の路面を撮影する第2ラインカメラと、車両の走行距離に応じて第1ラインカメラと第2ラインカメラに繰り返し撮影を指示する手段と、第1ラインカメラが撮影した画像系列にアフィン変換を施した画像と、第2ラインカメラが撮影した画像系列にアフィン変換を施した画像について、最も高い一致度を与えるアフィン変換パラメータを探索する手段と、探索されたアフィン変換パラメータに基づいて、第1視野範囲と第2視野範囲が交差する点の進行方向を算出する手段を備えている。
(もっと読む)
曲率半径測定機の被測定体保持位置補正方法および曲率半径測定機
【課題】曲率半径測定機の被測定体保持位置補正方法において、曲率半径測定機に発生する被測定体保持位置のずれを精度よく迅速に補正することができるようにする。
【解決手段】曲率半径測定機の被測定体保持位置補正方法であって、保持工程と、校正用光学部材の校正面の面頂を測定光束の集光位置に位置合わせし、位置合わせ後の干渉縞画像に基づく干渉縞画像情報を記憶する基準調整工程(ステップS3)と、この位置を基準位置として、基準位置から位置ずれ測定位置に被測定体を相対移動して干渉縞画像を記憶する位置移動工程と、各位置での干渉縞画像に基づいて干渉計の光軸に対する位置ずれ量を測定する位置ずれ算出工程(ステップS6、S13)と、この位置ずれ量に基づいて、位置補正量を算出する位置補正工程(ステップS15)と、を備え、被測定面の曲率半径の測定を行う際に、位置補正量に基づいて保持台の位置補正を行う。
(もっと読む)
三次元点群位置データ処理装置、三次元点群位置データ処理方法、三次元点群位置データ処理システムおよびプログラム
【課題】三次元点群位置データの処理の途中経過を知ることができる技術を提供する。
【解決手段】三次元レーザースキャナが測定した三次元点群位置データ(S502)に基づき、解像度を段階的に変えた三次元モデルを作成する(S505)。この際、低解像度の三次元モデルの作成およびその表示(S506)、さらにその後に、ラベリングされたデータを引き継いで(S509)の高解像度の三次元モデルの作成およびその表示を行う。ここで、低解像度の三次元モデルの表示を行うことで、最終的な三次元モデルの完成の途中の段階をユーザが把握することができる。
(もっと読む)
光学式曲がり測定装置
【課題】複数本の光ファイバーを設置し難い測定対象に対しても適用でき、測定対象の複数個所の特定方向の曲がり量を独立に測定し得る光学式曲がり測定装置を提供する。
【解決手段】光学式曲がり測定装置は、測定光を供給する光源ユニット110と、測定光を伝達する光ファイバー120と、光ファイバー120の異なる複数の部分に設けられた複数の光学特性変化部材150A,150B,150Cと、光ファイバー120から出力される光を検出する光検出ユニット140を備えている。各光学特性変化部材150A,150B,150Cは、これが設けられた光ファイバー120の部分の特定方向の曲がり量に応じてこれに入射した光に光学特性の変化を与える。光検出ユニット140は、光学特性の変化を受けた光を分離して検出し、その検出光強度に基づいて光ファイバー120の複数の部分の特定方向の曲がり量を独立に測定する。
(もっと読む)
反り検査装置および反り検査方法
【課題】平板状に形成される検査対象の反り方向を簡易な構成にて検査し得る反り検査装置および反り検査方法を提供を提供する。
【解決手段】アクチュエータ12により平面部11a上に載置された平板状のセラミック基板20の外縁部22が押圧されて、フォトセンサ13により上記押圧力の解除後におけるセラミック基板20の回転が検知される場合に、当該セラミック基板20の反り方向が、外縁部22に対して中央部21が平面部11a側に凸となる反り方向(下側に凸となる反り方向)であることが検知される。
(もっと読む)
走路推定装置及びプログラム
【課題】片側車線しか検出されない場合でも、俯角を固定することなく、走路に対する撮像装置の姿勢角を含むソロパラメータを推定する。
【解決手段】特徴点抽出部20により撮像装置12で撮像された撮像画像を取得して、撮像画像から特徴点を抽出し、車線境界点選択部22により、抽出された特徴点から車線を示す車線境界点を選択し、車線境界点記憶部24に一旦記憶する。走路パラメータ推定部26により、二時刻間でヨー角及び曲率が変化しないとの仮定の下で、二時刻間の横位置の変化を速度V及びヨー角を用いて表すことで、二時刻間の走路パラメータを関係付け、二時刻の各々で選択された車線境界点群と、走路パラメータにより定まる車線境界線との最適化により、走路パラメータを推定する。
(もっと読む)
膜形状取得装置および膜形状取得方法
【課題】テクスチャ構造を有する対象物上に形成された薄膜の形状を容易かつ高精度に取得する。
【解決手段】膜形状取得装置1では、上面に複数のテクスチャ凸部を有する基板9上に形成されたシリコン膜の光学モデルにおいて、複数のテクスチャ凸部に一致する薄膜凹部およびその上方に位置する薄膜凸部が設定される。そして、薄膜凸部、薄膜凹部、および、薄膜凸部と薄膜凹部との間の中間部の形状を表すパラメータ群に含まれる各パラメータを有効膜厚にて表現し、有効膜厚を変更することにより各パラメータの値を変更して理論スペクトルの測定スペクトルに対するフィッティングが行われる。これにより、シリコン膜の形状を容易かつ高精度に取得することができる。
(もっと読む)
乗物用シート
【課題】乗物用シートの剛性を低下させることなく、着座した乗員の体格を検知可能な乗物用シートを提供する。
【解決手段】乗員が背中を凭せ掛けるシートバック部20と、乗員が腰を下ろすシートクッション部30とを備え、シートバック部20またはシートクッション部30の少なくとも一方は枠部22を有しており、枠部22に2重となるように取り付けられる伸縮性を有する網状の表皮23と、シートバック部20またはシートクッション部30に対して乗員の反対側に配置されているとともに乗員が着座することで表皮に浮き出た模様を撮像する撮像手段Ca、Cbと、撮像した模様に基づいて着座している乗員の体格を判定する処理手段Cuとを備えている。
(もっと読む)
媒体カールを測定する角度付アレイセンサ法及びシステム
【課題】確実なマーキングが達成され、インクカートリッジへのダメージが防止されるように、媒体カールを測定する。
【解決手段】1つ以上のカールした媒体シート132〜138が、先端縁及び後端縁のどちらか又は両方からカーラーをもつローラ/ニップのセットを経て、角度付アレイセンサ130へ向かって、プロセス方向に前進させられる。クロスプロセス方向に回転ベクトルをもつ角度付アレイセンサ130は、シートカールの関数を計算するために、カーラーから出る媒体シートに対し角度を付けて、媒体前進装置の上流又は下流に配置される。シートカールの関数は、前進する媒体シートが角度付アレイセンサ130にあるアレイと接触するポイントを測定することによって得られる。このようなカール測定アプローチは、環境的に引き起こされるエラーに対する正確性とロバスト性を向上させる。
(もっと読む)
真円度計測システムおよびこれを備えた造管装置
【課題】断面外径が円形の計測対象物の真円度をリアルタイムで計測できる真円度計測システムを提供すること。
【解決手段】 断面外形が円形の連続的に移動する計測対象物Tの表面に、移動方向Pに対して直角な方向に線状の光を照射する光源U1a〜U4aと、前記測定対象物Tにおける前記光の照射領域を、前記搬送方向Pに対して直角で無い角度方向から撮像する撮像手段とU1b〜U4b、前記各撮像手段U1b〜U4bからの画像情報に基づいて、前記計測対象物Tの断面外形の真円度を計算する計算手段Cを備え、前記光源U1a〜U4aと撮像手段U1b〜U4bとが少なくとも2組設けられ、これら2組の光源U1a〜U4aと撮像手段U1b〜U4bは前記計測対象物Tの移動方向Pの上流から下流に向かう方向から見た場合に、前記測定対象物Tの中心軸に関して相互に等角度間隔に配置されている。
(もっと読む)
半導体装置の検査方法
【課題】半導体装置の信頼性の向上を図る。
【解決手段】BGA(半導体装置)の平坦度検査において、常温での平坦度の(+)方向の許容範囲が(−)方向の許容範囲に比べて小さい平坦度規格を形成し、前記平坦度規格を用いて常温での半導体装置の平坦度検査を行って実装良品/実装不良品を判定することにより、リフロー実装等の際の加熱時のパッケージ反りに起因する実装不良を低減してBGAの信頼性の向上を図るとともに、より実装状態を考慮した基板タイプの半導体装置の平坦度管理を行う。
(もっと読む)
ビードの終端部の形状を判定する装置及びその方法
【課題】本発明の目的は、溶接プロセスと同期してビードの画像を取得し、溶接プロセス直後の極めて短い時間でビードの終端部の穴欠陥を高精度に判定することが可能なビードの終端部の形状を判定する装置及びその方法を提供することにある。
【解決手段】本発明の装置1は、レーザ照射部2と、モニタ部3と、記憶部4と、画像取込部5と、ビード認識部6と、ビード形状判定部7とを備えている。ビード形状判定部7は、ビード認識部6によって認識されたビード領域に基づいてビード領域の終端部の位置を算出し、ビード領域の終端部がビード領域の延在方向に凸形状か凹形状かを判定するように構成されている。
(もっと読む)
1 - 20 / 170
[ Back to top ]