
Fターム[2F065AA51]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 輪郭 (4,339)
Fターム[2F065AA51]の下位に属するFターム
Fターム[2F065AA51]に分類される特許
1 - 20 / 1,007
3D表面形状測定と組み合わされた位相ステッピングシェアログラフィーのための低コヒーレント干渉計システム
同期されたユーザインタフェース機能を含むマシンビジョンシステムプログラム編集環境
外観検査装置
基板の凹部の検査方法および基板のレジスト膜の検査方法
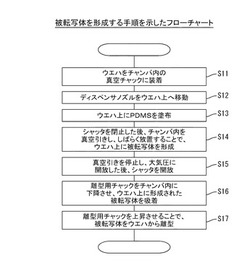
【課題】有底の凹部の状態を非破壊で検査し、製造コストを低減させる。
【解決手段】本発明のウエハ50のビア孔51の検査方法は、有底のビア孔51が表面に形成されたウエハ50に被転写材料を塗布し、この被転写材料をビア孔51内に充填させ、被転写材料を硬化させた後、ウエハ50から離型させることでビア孔51がビア像71として転写されてなる被転写体70を形成する転写工程と、ビア像71の表面を観察することでその表面形状の画像データを作成する表面観察工程と、ビア像71の画像データに基づいてビア像71の形状を評価し、ビア孔51内の状態を検査する検査工程とを備えたところに特徴を有する。
(もっと読む)
ステレオ3次元計測装置

【課題】真に最適なパラメータ群を得ることができ、精度の高い3次元計測を可能にするステレオ3次元計測装置を提供する。
【解決手段】ステレオ3次元計測装置1は、第1,第2のカメラ21,22で計測対象物の画像を複数取得する画像取得部2と、画像取得部2から複数の画像を受けて補正するステレオ平行化部32と、ステレオ平行化部32で補正された複数の画像同士の対応点を探索して、対応点に基づいて複数の画像の評価値を算出する対応点探索部33と、画像取得部2および対応点探索部33に、予め準備しておいた複数のパラメータ群を順次入力して、上記評価値に基づいて複数のパラメータ群の中から最適なパラメータ群を選択するパラメータ選択部4とを備える。
(もっと読む)
画像処理装置、画像処理方法及び画像処理プログラム
【課題】様々な位置姿勢や形状のワークに対応可能で、かつ、迅速に最大内接円を抽出可能な画像処理装置、画像処理方法及び画像処理プログラムを提供すること。
【解決手段】撮像部2によりワークWが撮像された元画像を取得する元画像抽出部31と、元画像抽出部31により取得された元画像を2値化して、元画像からワークWの概略領域を特定する領域特定部32と、領域特定部32手段により特定された概略領域を所定回数収縮処理する収縮処理部34と、元画像抽出部31により取得された元画像からワークWの輪郭線を抽出する輪郭線抽出部35と、輪郭線抽出部35により抽出されたワークWの輪郭線と収縮処理部34により収縮処理された収縮領域とを合成し、収縮領域の領域内で輪郭線に内接する最大内接円の中心点を探索して、中心点を中心としたワークWの内接円を抽出する最大内接円選定部36と、を備えた。
(もっと読む)
情報端末装置
【課題】簡素且つ高精度に撮像対象の大きさを推定して、その大きさに応じて表示情報の制御を行うことのできる情報端末装置を提供する。
【解決手段】撮像部2と、撮像対象の大きさを推定する推定部3と、情報を表示する表示部6と、表示部6で表示する情報を記憶する記憶部5と、推定された大きさに関連する情報を記憶部5から読み出して制御する制御部4とを備え、推定部3が、撮像対象の一面上に設けられた大きさ及び形状が既知のタグを検出するタグ検出部と、タグの周囲に形成される撮像対象の領域を抽出する領域抽出部と、検出タグの配置とタグの所定配置との比較に基づいて、検出タグの撮像部2に対する姿勢を推定する姿勢推定部と、推定姿勢に基づいて抽出された撮像対象の一面の大きさと、その一面を除外した奥行き部分の大きさとを推定するサイズ推定部とを含むよう情報端末装置1を提供する。
(もっと読む)
画像解析装置及びこれを用いた物体検出装置
【課題】対象物体上の外表面形状によらず、対象物体までの距離を利用した適正な制御や処理を実現することを課題とする。
【解決手段】自動車に搭載された2つのカメラ10A,10Bで自車両周囲の撮像領域を撮像して得られる複数の撮像画像を解析して対象物体までの距離を算出する際、撮像領域に向けて互いに異なる方向から非可視光を照射する2つの光照射部21,22の光照射時期が互いに重複しないように交互に非可視光を照射し、当該非可視光の照射によって対象物体の外表面に生じる非可視光の照射領域と非照射領域との境界線C1,C2上の同一の地点を映し出す対応点を光照射時期ごとにそれぞれ特定し、光照射時期ごとに、対応点のズレ量に基づいて距離を算出する。
(もっと読む)
移動距離計測装置、移動速度計測装置及びこれらを用いた撮像装置
【課題】対象物(被写体)の位置及び移動方向に限定されることなく、移動する対象物を撮像することによって、その対象物の移動距離を計測すること。
【解決手段】移動している被写体を撮像して、前記被写体の移動距離を計測する移動距離計測装置であって、撮像する位置から前記被写体までの距離に関する距離データを取得する測距手段と、撮像レンズを用いて、所定の時間間隔で前記被写体を撮像して、複数の画像を生成する画像生成手段と、前記距離データに基づいて前記複数の画像のうちの任意の2つの画像の前記被写体の位置に関する位置データを算出し、該位置データに基づいて前記撮像レンズの光軸の方向に対して垂直な平面に関する被写体の移動距離を算出する算出手段とを有することを特徴とする移動距離計測装置により上記の課題が達成される。
(もっと読む)
画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境
【課題】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境を提供する。
【解決手段】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのためのマシンビジョンシステム編集環境が提供される。一形態では、新しい共通シンタックス及び表現が利用され、2つのステージで実行されるパートプログラムを実行し、そのような連続画像取得動作が通常動作と同じ方法で記録される。最初のステージでは、画像取得の連続ストリームを持つパートプログラムの一部が画像取得動作のためにスキャンされ、画像取得プロセスが開始された後に、画像を取得するために最も効果的な命令が決定される。そして、第2のステージでは、画像取得プロセスが実行されている間に、パートプログラムの一部が再度スキャンされ、そして画像解析動作が実行される。
(もっと読む)
コークス炉移動機の位置調整方法及び装置
【課題】コークガイド車などの移動体の移動路に沿って設けられた目標体とコークス炉の位置関係に誤差が生じても移動機を簡易に目標とする位置にする。
【解決手段】コークガイド車1の移動路に沿って設けられた目標体9を検出し、目標体検出装置4で目標体9を検出したときのコークガイド車1の規定位置に対し、目標位置検出装置5で目標位置を検出しながら規定位置から目標位置までコークガイド車1を移動し、検出された目標位置と規定位置との位置誤差を記憶し、以降、目標体9を検出した位置から記憶された位置誤差分だけ移動してコークガイド車1を目標位置にすることにより、目標体9とコークス炉7の位置関係に誤差が生じても、一度、目標体9を検出したときの規定位置と目標位置との位置誤差を記憶してしまえば、以降はコークガイド車1を簡易に目標とする位置にすることができる。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
多波長干渉計、計測装置および計測方法
【課題】 被検面が傾いていても測定精度を悪化させることのない多波長干渉計を提供する。
【解決手段】 波長が互いに異なる少なくとも2つの光束を参照光と被検光とに分割し、分割された参照光の周波数と被検光の周波数とを異ならせ、被検光と参照光とを干渉させる干渉計において、干渉光を複数の光束に分割する分割部を有し、分割された複数の光束を各波長について検出する。
(もっと読む)
管端検査装置
【課題】管端部の加工部について、寸法精度と加工面の状態とを共に自動的に検査することができ、しかもインライン化が可能なよう検査装置全体のコンパクト化を可能にした、管端検査装置を提供する。
【解決手段】端部を加工した管2の管端加工部を検査する管端検査装置である。管端加工部の形状を計測するレーザ変位計42と、管端加工部の表面を撮影する撮像装置62と、レーザ変位計42及び撮像装置62を管端加工部の周方向に沿って移動させることにより、レーザ変位計42のレーザビームスポット及び撮像装置62の焦点を管端加工部の周方向に沿って周回させる回転テーブル(周回手段)と、を備える。
(もっと読む)
缶口金の加締不良検出方法及び検出装置
【課題】金属缶の天板部材に注出口として加締装着した口金について、加締装着を終えた段階で加締不良を迅速かつ確実に検出する手段を提供する。
【解決手段】天板部材11の口金2装着部分の全体に無影光を照射して稜線及び谷の輝度が同心円状に分布するように撮像し、画像処理装置4により、撮像した画像から、環状加締部3の稜線R1,R2を切り出し、稜線R1,R2に対応する近似真円C1,C2を演算して作定し、近似真円C1,C2と切り出し稜線R1,R2とに囲まれた領域Z1,Z2の面積を算出し、算出面積と設定した判定基準面積とを比較演算し、算出面積が判定基準面積以上である場合を加締不良と判定する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】画像から所望の領域を容易に抽出可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】画像データに基づく初期画像IMが表示部260に表示される。使用者が初期画像IMにおいて抽出すべき領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域が抽出領域として決定される。使用者が初期画像IMにおいて抽出すべき他の領域を含む抽出範囲を指定することにより、抽出範囲内で設定された抽出条件に基づいて一または複数の領域が抽出される。抽出された一または複数の領域から、領域に関する特徴情報に基づいて特徴領域が選択される。選択された特徴領域は、既に決定された抽出領域に加えられる。
(もっと読む)
形状計測装置、形状計測システム、及び形状計測方法
【課題】低いコストで、広い高さ範囲を高精度に計測可能な形状計測装置を提供する。
【解決手段】第1の光を発する第1の発光部11、及び第2の光を発する第2の発光部12と、第1の光及び第2の光を受ける格子3と、測定物4が配置されるステージ14と、格子3を透過した第1の光、及び格子3を透過した第2の光の両方が透過する投影光学系5であって、第1の光を第1の入射角で測定物4表面に入射させ、第2の光を第2の入射角で測定物4表面に入射させる投影光学系5と、第1の光による測定物4表面の格子3の第1の変形像、及び第2の光による測定物4表面の格子3の第2の変形像に基づき、測定物4表面の高さの分布を算出する高さ分布算出部と、を備える、形状計測装置。
(もっと読む)
溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法
【課題】溶接ビード欠陥の検出精度を向上できる溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法を提供する。
【解決手段】溶接ビードの欠陥を検出する溶接ビード欠陥検出装置10であって、溶接モデルBLと平滑モデルSLとの比較、あるいは、平滑モデルSLと折線モデルVLとの比較、に基づいて、溶接モデルBLを、異常点と正常点とに分別する点群データ分別手段200と、異常点と、隣接する正常点間の距離と、に基づいて、溶接モデルBLを、欠落領域GGと非欠落領域GNとに分別する欠落領域分別手段300と、欠落領域GGまたは非欠落領域GNを順次併合して併合欠落領域GGGとする欠落領域併合手段400と、を具備する。
(もっと読む)
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
(もっと読む)
空間・分光波面分析測定方法及び装置
【課題】ノイズの少ない方法で、容易には測定できない位相特性を測定し、また、振幅特性を強調された方法で
測定する。
【解決手段】振幅及び位相を有する分析対象波面に対して、フーリエ変換処理を行い、該分析対象波面に対応する複数の異なる位相変化された変換波面を取得し、該複数の位相変化された変換波面の複数の強度マップを取得し、該複数の強度マップを用いて該分析対象の三次元画像形成波面の振幅及び位相を表示する出力を取得する。
(もっと読む)
1 - 20 / 1,007
[ Back to top ]