
Fターム[2F065AA67]の内容
光学的手段による測長装置 (194,290) | 測定内容 (27,691) | 物体の通過 (37)
Fターム[2F065AA67]に分類される特許
1 - 20 / 37
対象検出装置および対象検出方法
【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
ケーブルの片撚り検出方法

【課題】インラインで連続的に正確な検出が行え、また非接触にもかかわらずコストの増加の少ないケーブルの片撚り検出方法を提供する。
【解決手段】一対のコア10a,10bを移動させながら対撚りしてケーブル11を作製する際にインラインで連続的に片撚りを検出するケーブルの片撚り検出方法であって、ケーブル11における対撚りの山12の高さを光透過型光電センサ13a,13bで非接触にて検出することにより対撚り周期を求め、その対撚り周期の変化に基づいて片撚りの発生を検出するものである。
(もっと読む)
円筒部材の検査法および検査装置
【課題】被検査対象物であるワークに対して加工したり、他の部位を装着したりすることなく、ワーク全周の疵を安定して検出することが可能な検査方法および検査装置を提供する。
【解決手段】ワークWの円筒面を検査部4にて検査するための検査装置および検査方法である。回転軸心L1,L2が相互に平行に配設されている一対の回転軸11,12にてワークを支持させた状態で、回転体11,12をワークに接触させる。一対の回転軸11,12を回転駆動させることにより、回転体31をワークとともに回転させる。回転軸11,12とワークWとの間に滑りが生じることなくワークWがその軸心廻りに1回転する基準時間での回転体31の回転状態を検出する。回転状態に基づいてワークWと回転軸11,12との間に滑りがあるか否かを判断しつつ、ワークWの画像を撮像する。
(もっと読む)
サイズ判定機構、及び、当該サイズ判定機構を用いる移動体処理装置
【課題】部品点数を低減するとともに、単純な構成の導光体を利用可能にする。
【解決手段】搬送中の移動体を検知する移動体検知部D1,D2を有し、移動体検知部は、搬送路5に臨む発光部S1,S3と、搬送路に臨む受光部S2,S4と、搬送路を介して発光部及び受光部に対向しており、発光部が放射した光を受光部に導く導光体P1,P2とによって構成されており、かつ、発光部及び受光部が移動体のサイズを区分するために予め設定された仮想上の境界線の両側に配置されるように、境界線の上に、境界線に対して傾斜して配置されている。
(もっと読む)
簡易式運動モニター装置
【課題】 市販の各種訓練機器に簡単に設置でき、簡単な操作で、訓練対象者のリハビリ進捗状況を客観的に評価し、リハビリの進捗状況に応じた最適な訓練を、最適なタイミング、頻度で行えるようにする。
【解決手段】 訓練対象者に、所定の動作を行わせる市販の訓練機器に、訓練開始時に押圧されるタッチセンサと、訓練対象者が各動作に対応した位置に到達したこと、及びこの位置から離れたことをそれぞれ検出するセンサを設置する。そして、タッチセンサが押圧されてから訓練対象者が各動作に対応した位置に達するのに要した時間、訓練対象者が各動作に対応した所定位置に達してから離れるのに要した時間をそれぞれ検出し、各所要時間を記憶する。コンピュータに搭載されたプログラムにより、各所要時間に基づいて各動作を評価し、その評価結果や次のステップのリハビリへの移行を促すようにする。
(もっと読む)
エレベータの位置検出装置および方法
【課題】エレベータ乗りかごの位置を検出するために、昇降路内の所定位置に位置表示体としてデジタル情報を表す遮蔽板31,32,33を配置し、乗りかご側に光電センサ20(21−1〜4)を搭載する。このとき、遮蔽板の少ないデジタル情報数で、多くの位置情報を区別して検出する。
【解決手段】各階床1〜nを示すための遮蔽板31−1〜31−nには、4列,2行のデジタル情報を表すようにし、これらの遮蔽板によって、光電センサ20(21−1〜20−4)にて得られたデジタル情報と、エレベータ乗りかごの運転方向情報とを組み合わせて位置を判定するようにすることで、方向別で、対称性を持ってしまうデジタル情報でも、異なる位置情報として活用できるようにした。
(もっと読む)
反り検査装置および反り検査方法
【課題】平板状に形成される検査対象の反り方向を簡易な構成にて検査し得る反り検査装置および反り検査方法を提供を提供する。
【解決手段】アクチュエータ12により平面部11a上に載置された平板状のセラミック基板20の外縁部22が押圧されて、フォトセンサ13により上記押圧力の解除後におけるセラミック基板20の回転が検知される場合に、当該セラミック基板20の反り方向が、外縁部22に対して中央部21が平面部11a側に凸となる反り方向(下側に凸となる反り方向)であることが検知される。
(もっと読む)
ラベル検査方法及び装置
【課題】容器に貼付されたラベルの良否がラベラ内で検査できるラベル検査装置を提供する。
【解決手段】自転しながら公転軌道3aを公転する容器2にラベル7を貼付するラベラ1と、ラベラ1の公転軌道3aを挟んで対向し、かつラベルの正面方向またはラベルの側面方向に設置された少なくとも一対の撮像手段12a〜12dと、撮像手段12a〜12dが撮像した容器2の画像をから容器2に貼付されたラベル7の特徴点を計測する画像計測演算手段22と、ラベル7の良否を判定する基準値が設定された良否判定基準値設定手段23と、画像計測演算手段22が計測した特徴点と基準値とを比較演算してラベル7の良否を判定する良否判定演算手段25とから構成したもので、ラベラ1内に撮像手段12a〜12dを設置するだけでよいため、既存のラベラにも容易かつ安価に実施することができる。
(もっと読む)
撮像式工具測定装置および測定方法
【課題】撮像環境の変化を検出し、工具寸法を高精度に測定できるように撮像条件を自動的に調整したり、画像を補正するようにした、撮像式工具測定装置および撮像式工具測定方法を提供する。
【解決手段】撮像部12からの工具像にかかる信号、または画像前処理部20からの処理信号に基づいて撮像環境・条件を検出する撮像環境・条件検出部25と、撮像環境・条件検出部25の検出情報を基に、撮像の適正条件を判断し、調整指令を導出する撮像条件判断・調整指令部27と、前記撮像条件判断・調整指令部27からの調整指令信号により、撮像条件を調整する調整手段と、を具備する。
(もっと読む)
クロップ落下検出方法
【課題】水蒸気やミストが充満する環境下においても、粗バーからのクロップの分離、落下を精度良く容易に検出することができ、また仮にクロップがクロップシュートに引っ掛り、複数のクロップがクロップシュート上に停滞、堆積した場合であってもその状態を早期且つ確実に認識することができるクロップ落下検出方法を得る。
【解決手段】熱間圧延後における粗バー2の先端及び/又は後端に形成された不定形部を切断したクロップ4をクロップシュート5を通じて落下させるに際して、上記クロップシュート5の近傍に、該クロップシュート5の全幅を監視する遠赤外線検出装置7を設け、クロップシュート5を落下してくるクロップ4が放射する遠赤外線を該遠赤外線検出装置7により検出して、該落下してくるクロップの形状を熱画像として出力することにより、クロップの落下を検出する。
(もっと読む)
光電センサ
【課題】設置が容易で被検出体を検出することが可能とすること。
【解決手段】投光ヘッド40は、投光軸L1が上側斜角に設定された拡散光P1をスリット40bから出射する。受光ヘッド50は、スリット50bに対して、受光軸L2が下側斜角に設定され先端面からの距離に比例して上下方向の幅が広くなる受光領域A1の光を入射する。そして、投光ヘッド40及び受光ヘッド50により形成される検出領域は、長方形状の範囲となり、検出領域の中心軸は、水平方向に沿って延び、平に搬送される板状のワークの板面と平行となる。
(もっと読む)
コンベヤベルト全長測定装置
【課題】簡便かつ迅速に精度よく無端ベルトの全長を測定できるコンベヤベルト全長測定装置を提供すること。
【解決手段】ベルトコンベヤ5を構成する無端ベルト6に一定の測定間隔Lで設置する第1反射部材12及び第2反射部材13と、無端ベルト6に設置された反射部材12,13に向けて所定の光を出射するLED15aと反射部材12,13からの反射光を受光するフォトトランジスタ15bとからなるセンサ部15と、無端ベルト6が起動されているときに、センサ部15からの出力信号に基づいて反射部材12,13が一定距離を通過するのに要する通過時間を計測する計測制御部20と、計測制御部20によって計測された結果を表示すると共に必要な情報を表示する表示部21と、計測制御部20に所定の信号を入力する入力部22と、を備える。
(もっと読む)
加工品の移送方向の長さ良否判定方法
【課題】長尺体を切断機により次々と所望長さに切断した後に移送されてくる切断された加工品についてラインの移送速度が変化しても正確でしかも安価且つ簡便に良否判定できる加工品の移送方向の長さ良否判定方法を提供する。
【解決手段】高精度なNC制御機器を備えた目印形成手段により加工品Kの両端部近傍に下流側の距離L1,上流側の距離L2及び目印間の距離Lに基づいて判定基準用目印2,2を形成した後に、切断機の下流側に設置固定されたカメラにより次々と受信される静止画像から下流側静止画像と上流側静止画像とを検索し、抽出された両画像を解析して加工品Kの下流側端縁と目印2との間の下流側静止画像上の距離xと加工品Kの上流側端縁と目印2との上流側静止画像上の距離yとを算出し、下流側静止画像上の距離xと下流側の距離L1、上流側静止画像上の距離yと上流側の距離L2をそれぞれ比較することによって加工品Kの所望長さXの良否を判定する。
(もっと読む)
用紙長測定装置
【課題】 用紙長の測定精度向上。
【解決手段】 搬送用紙の先端、後端を同時に検知して用紙長を測定する。
片方の端部を光学センサで検知し、そのタイミングでもう一方の搬送方向端部位置を搬送方向に配置されたラインセンサで検知、用紙長を算出する。
時間成分を排除して精度を向上。
(もっと読む)
物体寸法測定装置
【課題】 通路を移動する被測定体の寸法を光電的に無接触かつ高分解能で測定する。
【解決手段】 移動経路Bを移動中の被測定体Aの測長に際して、移動経路Bに沿って配置し、それぞれ複数個の発光素子12a、12b、・・・及び複数個の受光素子13a、13b、・・・を有する複数組の測定ユニット11を用いて同時に測定を始める。つまり、各測定ユニット11の各発光素子12a、12b、・・・からの発光、消灯が順次に行われ、これと同期して対応する各受光素子13a、13b、・・・が作動する。そこで、或る時点で各測定ユニット11における光ビームを検知せずオフ出力をした受光素子13iの総数を求めれば、被測定体Aの長さを知ることができる。
(もっと読む)
印刷装置の製造方法及び光軸調整方法
【課題】センサの周囲の物体からの反射光の影響を抑える。
【解決手段】投光部102及び受光部104を有するセンサ12と、光沢物体14とを備える印刷装置の製造方法であって、光軸調整工程を備え、光軸調整工程は、光沢物体14における少なくとも投光部102及び受光部104の光軸と対向する領域を、布16で被う低反射率部材設置段階と、投光部102及び受光部104とを対向させて、投光部102から受光部104が受光する受光量が最大になる位置に投光部102及び受光部104の光軸を合わせる第1光軸調整段階と、鏡18を布16上に設置する高反射率部材設置段階と、投光部102の光軸が光沢物体14から離れる方向へ投光部102の出射方向を傾けることにより、投光部102及び受光部104の光軸を合わせる第2光軸調整段階とを備える。
(もっと読む)
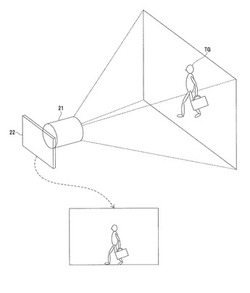
人数計測システム
【課題】建屋内もしくは室内に滞留する人数を計測する。
【解決手段】人物検出手段は人の出入りする場所の上方に設けられた複数台のカメラからなる撮像手段からの画像データにより距離情報を得るから、床上の影の距離情報と人物の距離情報とから区別して人物を検出することができ、人物計数手段は検出された人物について移動を追跡し、移動方向を検出してその人数を計数し、滞留人数計数手段において正確に滞留人数を計数することかできる。
(もっと読む)
位置特定方法、位置特定装置、及び、プログラム
【課題】取得した濃度値に誤差を含む場合であっても適切に画像の位置を特定することができるようにすること。
【解決手段】所定の画像のパターンを媒体に形成するステップと、前記媒体上を所定方向に走査して、該所定方向における各位置の濃度値を取得するステップと、ある位置の所定範囲に含まれる位置の前記濃度値の平均値に基づいて、該ある位置における前記濃度値と比較されるしきい値を補正するステップと、前記各位置について補正した前記しきい値に基づいて、前記所定の画像のパターンの形成されている位置を特定するステップと、を含む位置特定方法。
(もっと読む)
多重フィルタロッドの検査装置
【課題】 同色系のフィルタ素材が隣接する多重フィルタロッドを製造する製造機において、多重フィルタロッド内における個々のフィルタ素材の識別が可能な検査装置を提供する。
【解決手段】 多重フィルタロッド製造機の検査装置は、複数種のフィルタ素材からなる多重フィルタロッドが連続した中間製品Iに赤外線の検出光を入射させる光源24と、中間製品Iから反射した検出光を受け取る受光器30と、受光器30にて受取った検出光を3つの波長(1550nm,1720nm,1940nm)の検出光に分光する分光処理セクション34とを備え、この処理セクション34は分光された検出光の受光レベルに基づき、中間製品Iに含まれるフィルタ素材を識別する識別回路52を含む。
(もっと読む)
移動体の識別方法及びシステム、並びに、移動体の放射線結像検査の方法及びシステム
移動体を通路に進入させる進入ステップと、移動体の移動速度を計測するための速度計測ステップと、前記通路の一方側から光ビームを発する発光ステップと、前記通路の他方側で移動体に遮断されない光ビームを受光する受光ステップと、受光した光ビームと計測した移動体の移動速度により移動体の少なくとも一部の輪郭を確認する輪郭確認ステップと、前記少なくとも一部の輪郭を予め記憶された移動体の情報と比べて、移動体のタイプをさらに識別する識別ステップとを備えていることを特徴とする移動体の識別方法。本発明による方法とシステムは、異なる車両に対して、それと対応した走査制御方式を適用し、被検査車両の検査情報の完備を確保でき、画像の指標が高くなり、運転手に照射される線量が最低限度に抑えられる。 (もっと読む)
1 - 20 / 37
[ Back to top ]