
Fターム[2F065BB15]の内容
光学的手段による測長装置 (194,290) | 対象物−形態;性質 (11,481) | 移動物体 (1,418)
Fターム[2F065BB15]に分類される特許
1 - 20 / 1,418
三次元座標測定装置、三次元座標測定方法、及びプログラム
接触部検出装置および接触部検出方法
吊荷周辺の物体の高さ情報通知システム
レーザトラッカー
ゴルフスイングの診断方法
測位システム、測位方法、及びプログラム
物品配列検査方法および物品配列検査装置
【課題】整列状態にあることが要求される物品の列について、整列状態を乱す物品の位置ずれ、欠落、倒れなどの種々の整列不良を検出することを可能とする。
【解決手段】物品の列が整列状態にあるかどうかを検査する方法であって、準備工程では、整列状態にある物品a1〜a4の列Paに対しその物品の列を列方向の全幅にわたって切断するような帯状の光Rを照射して各物品a1〜a4の表面に各物品の輪郭に沿う光切断線Lを生成するとともに、その光切断線Lを撮像して基準となる画像を取得する。検査工程では、検査対象の物品b1〜b4の列Pbに対し同じ帯状の光Rを照射するとともに、前記準備工程で撮像した光切断線の生成位置に対応する位置に生成された光切断線Lを撮像して検査対象画像を取得した後、その検査対象画像を前記基準となる画像と照合して、検査対象の物品b1〜b4の列Pbが整列状態にあるかどうかを判別する。
(もっと読む)
車載カメラシステム及びその較正方法、及びその較正プログラム

【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
ゴム摩擦試験方法及びゴム摩擦試験装置
【課題】ゴム試験片の接触面形状を得るとともに接触面内の歪み分布を算出することで、ゴム試験片の摩擦摩耗特性を適切に評価できるゴム摩擦試験方法及びゴム摩擦試験装置を提供する。
【解決手段】本発明のゴム摩擦試験方法は、ドーナツ状のゴム試験片1の外周面11に画像解析用パターン13を形成するパターン形成工程と、ゴム試験片1の外周面11を、円筒部21が透明材料で形成された回転式ドラム2に接触させつつ、ゴム試験片1及び回転式ドラム2を回転させる摩擦試験工程と、摩擦試験工程と同時に、外周面11を円筒部21を通して撮影して外周面画像11Pを取得する画像取得工程と、取得した外周面画像11Pからゴム試験片1の接触面形状を得るとともに、外周面画像11Pに含まれる画像解析用パターン13に基いてゴム試験片1の接触面内の歪み分布を算出することにより、ゴム試験片1の摩擦摩耗特性を評価する評価工程と、を備える。
(もっと読む)
対象検出装置および対象検出方法
【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム
【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
画像処理装置、車両システム、及び、画像処理方法
【課題】天候及び距離によらず好適に物体までの距離を算出する。
【解決手段】画像処理装置は、取得された第1の車両の前方の画像から、第1の車両の前方の第2の車両の画像を検出する車両検出部と、第1の車両と第2の車両との距離を算出するために必要な複数のパラメータのうち、第2の車両の画像と前方の画像とから取得できないパラメータを判定する状況判定部と、第2の車両の画像と前方の画像とからパラメータを取得し、取得されたパラメータによって第1の車両と第2の車両との距離を算出する少なくとも一つの距離測定部と、を備え、状況判定部が、取得できないパラメータを判定した場合、少なくとも一つの距離測定部は、状況判定部によって判定された取得できないパラメータ以外のパラメータを用いて第1の車両と第2の車両との距離を算出するため、第2の車両の画像と前方の画像とを取得する。
(もっと読む)
移動距離計測装置、移動速度計測装置及びこれらを用いた撮像装置
【課題】対象物(被写体)の位置及び移動方向に限定されることなく、移動する対象物を撮像することによって、その対象物の移動距離を計測すること。
【解決手段】移動している被写体を撮像して、前記被写体の移動距離を計測する移動距離計測装置であって、撮像する位置から前記被写体までの距離に関する距離データを取得する測距手段と、撮像レンズを用いて、所定の時間間隔で前記被写体を撮像して、複数の画像を生成する画像生成手段と、前記距離データに基づいて前記複数の画像のうちの任意の2つの画像の前記被写体の位置に関する位置データを算出し、該位置データに基づいて前記撮像レンズの光軸の方向に対して垂直な平面に関する被写体の移動距離を算出する算出手段とを有することを特徴とする移動距離計測装置により上記の課題が達成される。
(もっと読む)
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置
【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
鋼管の外面曲がり測定方法
【課題】搬送される鋼管が跳ねた場合や楕円または外径の変動が鋼管に生じている場合も正確に測定できるとともに、工数を増大させることなく測定間隔を短くして定量的に測定できる外面曲がりの測定方法を提供する。
【解決手段】複数のローラ31によって鋼管11をその周方向に回転させつつ長手方向に搬送し、ローラ31のうちで隣り合うローラ31の間に鋼管外面の上端および下端の位置を検出する検出器21を等間隔に3台配置し、検出器21で検出した上端および下端の位置から鋼管外面の中心位置を3台の検出器についてそれぞれ求め、下記(1)式により振れwを算出すること特徴とする鋼管の外面曲がり測定方法である。ここで、3台の検出器21のうちで上流側(A位置)での中心位置をCA、中央(B位置)での中心位置をCB、下流側(C位置)での中心位置をCCとする。
w=CB−(CA+CC)/2 ・・・(1)
(もっと読む)
検出装置、画像形成装置及びプログラム
【課題】保持部材の第1の方向のたわみを検出する。
【解決手段】第1のイメージセンサは、中間転写ベルトの裏面に形成されたラダーパターンチャートの濃度を測定する。記憶部は、第1のイメージセンサと中間転写ベルトの裏面との間の距離と、この第1のイメージセンサの測定に係るラダーパターンチャートのコントラストとの対応関係を示す第1の関数を記憶する。制御部は、第1のイメージセンサにより測定されたラダーパターンチャートの濃度を用いて、ラダーパターンチャートにおいて隣り合う白領域と黒領域とのコントラストを算出する。制御部は、記憶部に記憶された第1の関数を用いて、算出されたコントラストに対応する距離を特定し、特定した距離を上述した白領域及び黒領域と中間転写ベルトの裏面との間の距離として用いて、中間転写ベルトの幅方向のたわみを検出する。
(もっと読む)
コークス炉移動機の位置調整方法及び装置
【課題】コークガイド車などの移動体の移動路に沿って設けられた目標体とコークス炉の位置関係に誤差が生じても移動機を簡易に目標とする位置にする。
【解決手段】コークガイド車1の移動路に沿って設けられた目標体9を検出し、目標体検出装置4で目標体9を検出したときのコークガイド車1の規定位置に対し、目標位置検出装置5で目標位置を検出しながら規定位置から目標位置までコークガイド車1を移動し、検出された目標位置と規定位置との位置誤差を記憶し、以降、目標体9を検出した位置から記憶された位置誤差分だけ移動してコークガイド車1を目標位置にすることにより、目標体9とコークス炉7の位置関係に誤差が生じても、一度、目標体9を検出したときの規定位置と目標位置との位置誤差を記憶してしまえば、以降はコークガイド車1を簡易に目標とする位置にすることができる。
(もっと読む)
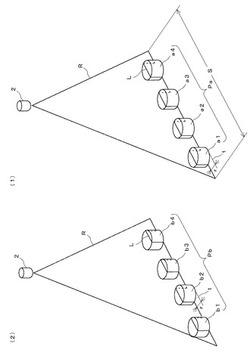
非接触座標測定機の真直度評価方法および真直度評価装置
【課題】
非接触座標測定機の真直度の評価作業に時間が掛からないようにする。
【解決手段】
直方体形の基材11と基材11の長さ方向に間隔を介して固定された複数の球体16,17,18,19とからなる評価用標準器1を高精度の接触座標測定機で測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての校正値Aを得る第1の手順と、評価する非接触座標測定機2で評価用標準器1を測定して評価用標準器1の球体16,17,18,19の中心の位置の真直度についての測定値Bを得る第2の手順と、測定値Bから校正値Aを引いた補正値Cから非接触座標測定機2の真直度を評価する第3の手順とを実行する。
(もっと読む)
3次元座標算出装置、3次元座標算出方法、及びプログラム
【課題】フレーム画像上の対象画像領域を代表する代表3次元座標の精度を向上させる。
【解決手段】3次元座標算出装置は、フレーム画像に撮像されている物体を含む対象画像領域内の前記物体の特徴点である複数の候補3次元点の3次元座標から、各候補3次元点に対するスコアを算出するスコア算出部と、前記候補3次元点の3次元座標と、該3次元座標に対する前記スコアとに対する統計処理を用いて前記対象画像領域を代表する点の3次元座標である代表3次元座標を算出する代表3次元座標算出部とを備える。
(もっと読む)
1 - 20 / 1,418
[ Back to top ]