
Fターム[2F065CC00]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635)
Fターム[2F065CC00]の下位に属するFターム
プリント基板 (376)
フィルム;シート (476)
磁気ディスク;光ディスク (101)
ねじ (34)
歯車 (13)
鋼板 (147)
H型鋼、T型鋼 (20)
タービンブレード (54)
アンテナ (1)
工具 (120)
車両;自動車 (618)
車輪 (66)
タイヤ (136)
建築物 (337)
溶接部 (101)
人体;動物 (953)
半導体製造関連 (1,910)
光学要素 (628)
電子部品関連 (997)
付着膜;蒸着膜 (441)
エッチング (11)
トロリー線 (55)
レール (54)
磁気ヘッド (2)
炉内堆積物 (23)
路面;トンネル内面 (196)
Fターム[2F065CC00]に分類される特許
61 - 80 / 765
画像処理方法、画像処理装置およびそれを搭載した水中検査装置
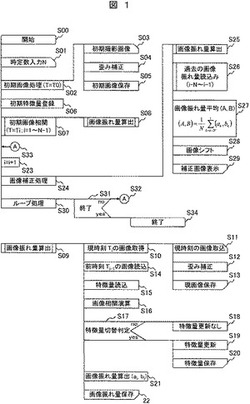
【課題】画像情報のみを用いて、画像の振れを修正し、画像を安定化でき、水中検査装置の操作性が向上する画像処理方法,画像処理装置およびそれを搭載した水中検査装置を提供する。
【解決手段】移動体に搭載した撮影手段により被写体を連続的に撮影して撮影画像を取得し、連続して得られた2つの画像に共通に撮影されている被写体の要素を特徴量に定め、連続して得られた2つの画像に対して画像相関処理を行って特徴量の一致度を判断し、所定以上の一致度が得られない場合には新たな被写体の要素を特徴量に定め、連続して得られた撮影画像における特徴量の位置を、二次元の撮影画像の一方方向の所定位置に固定し、二次元の撮影画像の他方向の変化量を前記撮影手段の移動量とする。
(もっと読む)
転がり軸受の表面検査装置

【課題】軌道輪表面の仕上がりの良否を簡易にかつ自動的に判断可能であり、製造コストが安価であると共に検査処理が簡単でありしかも精度の高い検査が可能な転がり軸受の表面検査装置を提供する。
【解決手段】検査表面に対しレーザ光を照射し、表面で反射したレーザ光を受光するレーザ光送受手段と、受光した光強度に対応する電気信号を出力する光電変換手段と、レーザ光照射部を軌道輪の軸と同軸で回転させる周方向走査手段と、レーザ光送受手段を軌道輪の軸に沿って移動する軸方向走査手段と、周方向走査の各位置において、光電変換手段から出力される電気信号出力の、軸方向における最大値を取得する最大値取得手段と、取得した最大値のうち、ハレーション状態に対応する最大値の個数を計数するハレーション個数計数手段と、ハレーション個数計数手段により計数されたハレーション個数に応じ、軌道輪の良否を判断する判断手段とを備える。
(もっと読む)
マーカ
【課題】本発明の課題は、マーカとマーカの観測物が正対する付近でも、マーカを観測物により正確に計測することができるマーカを提供することである。
【解決手段】上記の課題を解決するために、本発明に係るマーカは、模様と、模様の上に付けられたレンズであって、レンズを観測する方向に応じてレンズ上に観測される濃淡パターンが変化するレンズとを含むマーカユニットを備えることを特徴とする。
(もっと読む)
ステージ装置、露光装置及びデバイスの製造方法
【課題】テーブルの位置決めに有利なステージ装置を提供する。
【解決手段】ベース部と、XY平面に沿って移動可能なテーブルと、Y軸方向に沿った前記第1の端面の位置を計測する第1のY軸干渉計222と、前記Y軸方向に沿った第2の計測光路を有する第2の端面の位置を計測する第2のY軸干渉計224と、前記第1のY軸干渉計及び前記第2のY軸干渉計から前記XYZ座標系のX軸方向に離間して、且つ、前記Y軸方向に沿った第3の計測光路を有する第3のY軸干渉計228と、前記第1のY軸干渉計の計測値、前記第2のY軸干渉計の計測値及び前記第3のY軸干渉計の計測値に基づいて前記テーブルの変形量を求め、前記変形量に基づいて目標位置を補正した補正目標位置を求め、前記第1のY軸干渉計の計測値と前記第2のY軸干渉計の計測値から求まる前記テーブルの位置が前記補正目標位置に位置するように前記テーブルを位置決めする制御部とを有する。
(もっと読む)
内燃機関の変位計測装置
【課題】車両に搭載された内燃機関の変位量を容易にして精度良く計測可能な内燃機関の変位計測装置を提供する。
【解決手段】変位測定手段による第1被測定体と第2被測定体の測定結果に基づいて内燃機関の変位量を算出する変位量算出手段を備え、該変位量算出手段は、第1被測定体の第1測定面上に変位測定手段による測定点を含んで形成される第1直線部分l1、l'1の延長線と第2被測定体の第2測定面上に変位測定手段による測定点を含んで形成される第2直線部分m1、m'1の延長線との交点P(X、Z)、P'(X'、Z')を求め、該交点の第1直線部分と第2直線部分とにより形成される基準平面上での変位を演算することで内燃機関の変位量を算出する。
(もっと読む)
電磁波イメージング装置
【課題】測定表面が曲面であっても確実にその表面状態をイメージングする。
【解決手段】構造物の曲面に電磁波を複数の送信アンテナからそれぞれ放射する複数の送信回路と、構造物の構造物物の曲面で反射した電磁波を複数の受信アンテナでそれぞれ受信する複数の受信アンテナとを有し、送受信アンテナ13aと送受信回路13bとが一体化された複数のミリ波モジュール13をコンクリートポールCPの曲率に合わせて円弧状にアレイ化して配置する。
(もっと読む)
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
ロール変位測定方法、及びそれを用いたロール変位測定装置、並びにフィルム厚測定方法、及びそれを用いたフィルム厚測定装置
【課題】被測定物が掛けられるロールの変位を高精度に測定し、被測定物の材質に拘わらず、被測定物の厚さ寸法を高精度に測定する。
【解決手段】ロール2の周面に、ロール軸に沿って延びる複数のマーキング2aを平行に設け、検出ヘッド5に、前記マーキングの接近を検出する近接センサ18,19を、前記ロールの中心軸を挟んで相対向する位置にそれぞれ設け、前記ロールにフィルム20が掛けられていない状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第一の検出時間差と、前記ロールにおける第一の回転速度とを求めるステップと、前記ロールにフィルムが掛けられた状態で、前記検出ヘッドを走査し、前記相対向する近接センサの間における第二の検出時間差と、前記ロールにおける第二の回転速度とを求めるステップと、前記第一及び第二の検出時間差と、前記第一及び第二の回転速度とに基づいて、前記ロールの変位を求める。
(もっと読む)
位置変動監視装置およびこれを含む位置変動監視システム
【課題】監視対象領域の位置変動の測定精度を高める。
【解決手段】位置変動監視システム1は、予め決められた監視対象領域に設置された複数の監視指標2と、複数の監視指標2が撮像された撮像画像を用いて監視対象領域の位置変動を検出する位置変動監視装置3とを備える。位置変動監視装置3は、複数の監視指標2を予め設定された時間間隔で撮像する撮像部51と、撮像部51により時系列で得られる撮像画像を用いて複数の監視指標2の位置変位を求める画像解析部61と、複数の監視指標2の位置変位があった場合に警告を報知するように報知装置4を制御する報知制御部63とを備える。
(もっと読む)
材料流れの幅を測定する方法
【課題】放物線で送り出される材料流れの幅を測定する方法の提供。
【解決手段】第1の位置と第2の位置を通過するように移動しながら下方へ放物線で送出する材料流れの幅を測定する方法であって、所定の鉛直走査面に対して走査測定を行って複数の距離データを取得し、第2の位置で材料流れの光波測距手段に向かっている端縁における複数の点の座標データを第1の軌跡情報として取り出し、第2の位置で材料流れの光波測距手段に向かっている端縁における複数の点の座標データを第2の軌跡情報として取り出してから、第1の軌跡情報および第2の軌跡情報を用いて第1の軌跡情報に対応する第1の曲線および第2の軌跡情報に対応する第2の曲線を算出してから材料流れの幅を算出することを特徴とする、材料流れの幅を測定する方法。
(もっと読む)
配筋情報取得装置及び配筋情報取得方法
【課題】立体的に配置された鉄筋の配筋情報を取得する。
【解決手段】撮影者は、撮影対象部位2を決定し(S702)、撮影対象部位2の鉄筋のうち、4隅の鉄筋にマーカMKを取り付け、1の鉄筋に方位確認用マーカDMKを取り付ける(S703)。次に、鉄筋内側の中心部付近に全方位カメラ3を挿入し(S706)、その中心部から360度全周囲の鉄筋を全方位カメラ3で撮影し(S707)、撮影した全周囲画像のデータを全方位カメラ3から携帯端末4に取り込む(S708)。携帯端末4は、取り込まれた全周囲画像を方位確認用マーカDMKに基づいて平面画像に展開する(S709)。続いて、展開した平面画像において方位確認用マーカDMK及びマーカMKを検出することにより、その平面画像を4面の画像に分割する(S710)。さらに、分割した各面の画像に対して画像処理を行い、鉄筋の径長やピッチを計算する(S711)。
(もっと読む)
変位測定装置
【課題】共振器の可動側反射面の変位量を高精度に取得できる変位測定装置を提供する。
【解決手段】一定の波長可変幅を有する2つの測定用レーザ光源10、11と、ファブリーペロー共振器12と、共振器からのレーザ光出力を検出する光検出器18、19と、光検出器の値に基づき共振器長Lの変位量に追従するように測定用レーザ光源10、11の周波数を該共振器12の共振周波数にロックする波長制御手段20と、測定用レーザ光の周波数の変化量を検出する周波数検出手段50とを備える。波長制御手段20は、所定の共振周波数に測定用レーザ光源10の周波数をロックする第1ロック手段62と、測定用レーザ光源10の波長可変幅内で、ロック状態が解除されている他の測定用レーザ光源11の周波数を、第1ロック手段でロックされた共振周波数よりも大きいまたは小さい別の共振周波数にロックする第2ロック手段とを含む。
(もっと読む)
ワーク検査装置
【課題】搬送されるワークの外形を正確に検査する。
【解決手段】両側にガイド壁22を備えた直線状のワーク搬送路Pを設け、搬送されるワークWを上方からCCDカメラ4で撮像してワーク寸法の良否を検査するワーク検査装置であって、CCDカメラ4に中心を一致させて下方のワーク搬送路Pに向けて設けたリング状照明器3と、ガイド壁22の上方にこれに沿いワーク搬送路Pに向けて設けたライン状照明器5A,5Bとを備える。
(もっと読む)
光干渉測長装置
【課題】位置決め装置を初期化する際に、短時間で移動体の絶対位置測定が可能であり、なおかつ長時間に渡り安定した移動体の移動量測定が可能な光干渉測長装置を提供する。
【解決手段】移動体であるスライダ10の移動量を測定する光干渉測長装置は、光を測定光と参照光に分離し、測定光を、スライダ10に設置された測定ミラー9によって反射させ、参照光を参照ミラー8によって反射させる。測定ミラー9による測定光路の屈折率を、チャンバー2の内部の気圧を増減させることによって変化させ、屈折率の変化による干渉計の測長値の変化から、スライダ10の絶対位置を測定する。
(もっと読む)
ランドマーク検知方法、ロボット及びプログラム
【課題】ランドマーク検知方法、ロボット及びプログラムにおいて、ランドマークの検知精度を向上させることを目的とする。
【解決手段】自律走行型ロボットからランドマークを検知するランドマーク検知方法において、ロボット内でカメラが出力する撮像画像に基づいてランドマークの特徴点の特徴ベクトルを生成し、前記特徴ベクトルとランドマーク登録時の特徴点の特徴ベクトルとに基づいてマハラノビス距離を計算し、前記マハラノビス距離が最小の特徴ベクトルを選択してランドマークの検知結果とし、ロボットの移動量と正規分布誤差に基づいてロボットの現在位置の候補を求め、前記ロボットの現在位置の候補について、登録されているランドマークの位置との整合性を評価して評価結果を出力し、前記ロボット位置の候補の座標に前記評価結果に応じて重み付け平均を計算してロボットの推定位置を得るように構成する。
(もっと読む)
コンクリート内部の鉄筋腐食計測方法
【課題】 コンクリートの破壊や、含水率の調整等をしなくとも、鉄筋の腐食状態を計測可能とする。
【解決手段】 コンクリート内部の鉄筋腐食計測方法は、コンクリートの表面のひずみを計測するひずみ計測工程と、ひずみ計測工程による計測結果に基づいて、コンクリート内部の鉄筋の腐食状態を推測する腐食状態推測工程とを含む。
(もっと読む)
位置センサ及びリソグラフィ装置
【課題】コンパクトなユニット内に組み込むことができ、複数の自由度の位置測定値を提供できる位置センサを提供する。
【解決手段】位置センサは、ターゲットの位置データを測定するように構成される。位置センサは、放射ビームを照射するように構成された放射源と、放射ビームを第1の回折方向に少なくとも1つの1次放射ビームに回折するように構成された第1の格子と、1次回折ビームの光路内に配置され、第1の格子で回折された1次回折ビームを、第1の回折方向に実質的に垂直な第2の回折方向に回折するように構成された第2の格子とを含む。第2の格子はターゲットに接続される。第1の検出器は、第1の格子によって回折されたビームの少なくとも一部を検出するように構成され、少なくとも1つの第2の検出器は第1の格子と第2の格子によって回折されたビームの少なくとも一部を検出するように構成される。
(もっと読む)
電気鉄道保守用車両位置測定装置
【課題】車両の走行位置と通過時刻との関係を高精度に特定することを可能とした電気鉄道保守用車両位置測定装置を提供する。
【解決手段】電気鉄道保守用車両位置測定装置において、ラインセンサ1と、ラインセンサ1で撮影した画像をテンプレート画像と入力画像として作成する画像作成部10と、画像作成部10において作成したテンプレート画像と入力画像を保存するメモリ11と、保存したテンプレート画像からSIFT特徴量を抽出してテンプレートデータを作成しメモリ12に保存するテンプレート作成処理部13と、入力画像からSIFT特徴量を抽出しメモリ12に保存するSIFT特徴量抽出処理部14と、保存したテンプレートデータのSIFT特徴量と入力画像のSIFT特徴量との対応点を探索し入力画像中のハンガ位置を検出してメモリ12に保存するハンガ位置検出処理部15とを備えた。
(もっと読む)
光学式変位検出機構のスポット光の位置合わせ方法およびそれを用いた走査型プローブ顕微鏡
【課題】 光源からの光を測定対象や光検出器の受光面へ位置合わせを行う際に、位置合わせを容易に、かつ確実に行うことが可能な光学式変位検出機構のスポット光の位置合わせ方法を提供する。
【解決手段】 測定対象となるカンチレバー6に光を照射する光源10と、光源10を駆動する光源駆動回路21と、光源10からカンチレバー6に照射した後の光を受光し、光強度を検出する光検出器16と、光検出器16の検出信号を所定の利得で増幅する増幅器22から構成される光学式変位検出機構において、光検出器16で検出される検出感度を利得(増幅率)調整器を用いて実際に測定対象を測定する時よりも小さい値に設定して、光検出器16の所定の位置に光検出器用位置決め機構18により光のスポット20の位置決めを行うようにした。
(もっと読む)
3次元位置測定装置
【課題】 画像法の3次元位置測定装置において、測定可能な測定対象物の大きさ、及び測定対象物までの距離の範囲を拡げる。
【解決手段】 撮影視野の仰角、方位角、及び画角の設定を変更する機能を有するPTZカメラ1、2と、PTZカメラ1、2の撮影視野の設定情報及び撮影画像情報に基づいて、PTZカメラ1、2が撮影した測定対象点の3次元座標を算出する3次元座標算出手段34とを有する。
(もっと読む)
61 - 80 / 765
[ Back to top ]