
Fターム[2F065CC05]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 歯車 (13)
Fターム[2F065CC05]に分類される特許
1 - 13 / 13
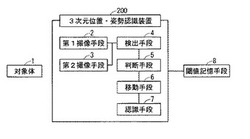
3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラム
【課題】本発明は、簡易な構成で、エッジ部分の画像解析により対象体の3次元位置・姿勢認識が可能な3次元位置・姿勢認識装置、3次元位置・姿勢認識方法、3次元位置・姿勢認識プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、第1画像と、第2画像とのうち少なくとも一方に撮像された対象体1の画像要素を解析し、対象体1におけるエッジの方向を検出する検出手段4と、検出結果に基づいて、第1撮像手段2及び第2撮像手段3のうち少なくとも一方と対象体1との相対位置を変化させるか否かを判断する判断手段5と、第1撮像手段2及び第2撮像手段3のうち少なくとも一方を、対象体1に対して相対的に移動させる移動手段6とを備えることを特徴とする。
(もっと読む)
ロボット装置、位置検出装置、位置検出プログラム、および位置検出方法

【課題】物体の位置を高速に且つ高精度に検出する。
【解決手段】位置検出装置30は、微細な軸穴とこの軸穴を含むマーカーとを設けたオブジェクトを含む画像データを取得する画像データ取得部31と、マーカーをゴール位置に対応付けたマーカーゴール画像データを記憶するマーカーゴール画像記憶部32と、軸穴の軸中心をゴール位置に対応付けたターゲットゴール画像データを記憶するターゲットゴール画像記憶部36と、マーカーゴール画像データを用いて、画像データ取得部31が取得した画像データからマーカーを検出するマーカー検出部33と、ターゲットゴール画像データを用いて、画像データ取得部31が取得した画像データにおける、マーカー検出部33が検出したマーカー内から軸穴を検出するターゲット検出部37とを備えた。
(もっと読む)
ワーク検査装置及びその制御方法
【課題】周期的に繰り替えられて形成された部分を有するワークの撮像及び検査に要する時間を短縮できるワーク検査装置及びその制御方法を提供する。
【解決手段】基準パルスPAに基づいてワークWの歯部W1と撮像タイミングとを同期させ、撮像したk(kは整数)番目の画像と(k+1)番目の画像との差分を得る画像処理を行い、差分のデータに基づいて欠陥を検出するようにした。
(もっと読む)
非接触形状測定装置
【課題】測定ワーク側に別部品の反射手段を設置する必要がなく且つ微小な測定ワークの内面も測定可能な非接触形状測定装置を提供する。
【解決手段】X軸と平行なレーザー光Lをプローブ8よりクランク状に折り曲げるため、レーザー光Lを折り曲げるための別部品を必要とせず、プローブ8をそのまま測定ワーク1の内面の内部に挿入するだけで、測定ワーク1の内面形状が測定可能となる。プローブ8を小さくすれば微小な測定ワークの内面も測定可能となる。
(もっと読む)
歯車形軸継手の使用限界判定方法
【課題】歯車形軸継手を稼動中に開放することなく、内部の歯車の摩耗量を検知し、歯車形軸継手の使用限界の判定を行う
【解決手段】 内歯車5を有する外筒6と、外歯車4を有する内筒3とを備える歯車形軸継手に外筒6に連動して回転する第1反射体11、および、内筒3に連動して回転する第2反射体10を設置し、駆動側軸1bの回転数と同調して発光させた光を第1反射体11および第2反射体10に照射し、反射光から把握される第1反射体11および第2反射体10の相対的な位置関係により歯車の摩耗量を検知し、歯車形軸継手の使用限界を判定する。
(もっと読む)
輪郭形状測定方法
【課題】歯車歯形、ネジ形状、歯形・ネジのピッチなどを精度良く、しかも効率良く測定可能な非接触型の測定方法を提案すること。
【解決手段】輪郭形状測定方法では、被測定物体1の輪郭形状の理想輪郭形状に沿って等間隔の空隙3を作り出す補償用輪郭形状2aを備えた補償用物体2を用意し、被測定物体1の理想輪郭形状からの偏差となる空隙3の変化を、光源4から空隙3の測定点P1に照射された光の通過光量の変化として、受光装置5において読み取ることができる。従来の輪郭投影機に見られるような画像分解能に関する光学的限界に支配されず、高精度の受光素子の有する光強度変化に関する分解能の限界まで輪郭形状の測定分解能を高めることが出来る。
(もっと読む)
歯付回転体の偏心度測定装置
【課題】 一度セッティングするだけで全ての歯についての偏心度を測定できるようにし、測定精度を向上させるとともに、測定作業を容易にし、測定時間を大幅に短縮して、測定効率の向上を図る。
【解決手段】 外周2に基本中心軸を中心にして複数の歯3を加工し、基本中心軸が中心となるように孔4を加工してなる歯付回転体1の基本中心軸に対する孔4の孔中心軸の偏心度を測定する歯付回転体の偏心度測定方法において、歯付回転体1を、孔中心軸を中心に回転させ、回転する歯付回転体1の直径方向外側に設けられた光源21から歯3に向けて光を照射するとともに歯3からの反射光を受光して光源21と歯3の外周との距離を計測し、各歯3毎の距離の最短値である個別ピーク値を検出するとともに、検出された全ての歯3の個別ピーク値のうちの最大値と最小値との差を求める。
(もっと読む)
回転角度検出装置
【課題】検出対象である回転体の回転角度の検出精度を向上させることができる。
【解決手段】舵角センサ11は、ステアリングシャフト12と一体回転する外歯車14及びこれに噛み合う内歯車15を備えた。外歯車14及び内歯車15の第1及び第2の検出面14a,15aには、6つの第1及び第2検出部材21,31を環状に配設するとともに、これらの内側には環状の第1及び第2補助検出部材22,32を設けた。第1及び第2検出部材21,31の幅、並びに第1及び第2補助検出部材22,32の幅を検出してこれら幅情報を含む明暗情報を出力するラインセンサ42を、第1及び第2の検出面14a,15aに対向して配設した。ラインセンサ42からの明暗情報に基づき外歯車14及び内歯車15の単位角度範囲内における回転角度を求め、これら回転角度の組み合わせに基づき外歯車14の絶対回転角度を算出するマイクロコンピュータ43を備えた。
(もっと読む)
鉄道車両用検出装置
【課題】本発明は、簡易な構成で回転数と回転角を検出可能な鉄道車両用検出装置を提供することを目的とする。
【解決手段】鉄道車両の運転に伴い回転する円形の磁性鋼板と、この磁性鋼板の外周に同じ間隔で設けられた複数の凸凹と、前記磁性鋼板の外周側且つ前記磁性鋼板と接触しない位置に設けられた速度検出器とを有し、前記磁性鋼板の凸又は凹の一部の高さを、他の凸又は凹の高さより低くし、前記速度検出器により検出される電圧に基づき、前記他の凸又は凹の高さよりも低い凸又は凹の位置を検出することを特徴とする鉄道車両用検出装置。
(もっと読む)
ギヤの磨耗検知機構及び磨耗検知方法
【課題】ピニオンギヤが速く回転しても確実にギヤの歯面磨耗を検知することができ、磨耗量の検知をユーザの任意の量で確実に検知できる手段を提供する。
【解決手段】ギヤの歯面の側面を検出する第1のセンサ1及び第2のセンサ2と、を備え、ギヤを回転させたときの、第1のセンサ1の信号の変化するタイミングから第2のセンサ2の信号の変化するタイミングの時間の差が、予め設定した閾値よりも大きくなったとき、ギヤが磨耗したと判断する磨耗検知機構を構成する。
(もっと読む)
電動式操向装置
【課題】操向軸の回転方向および回転角度を検知することの可能な操向角センサを備える電動式操向装置を提供する。
【解決手段】本発明の電動式操向装置は、自動車の操向ホイール101に連結される操向軸102と、操向補助動力を供給するモータと、対向して設けられた発信部601および受信部602を含む方向センサ610と、操向軸102の回転によって発信部601および受信部602の間を通過しながら回転し、一側にスロット611が形成された回転部材620と、モータのモータ軸の回転角を検知するモータ位置センサ640と、方向センサ610およびモータ位置センサ640から各々伝達された電気的信号に基づいて操向角を算出する電子制御装置123とを備える。操向軸102の回転方向を検知する方向センサ610とモータ軸の回転角を検知するモータ位置センサ640とを用いて、操向軸102の絶対操向角を検知する操向角センサ200を提供する。
(もっと読む)
腐食構造物の強度劣化予測方法
【課題】 簡便で精度を向上できる腐食構造物の強度劣化測定方法と、将来予測方法とを実現する。
【解決手段】 腐食構造物の腐食表面形状を、非接触式、かつ三次元にて測定する(ステップ2)。パラメータを変化させて種々な凹凸表面形状を再現するための表面形状作成モデルを用い、三次元的にて測定された上記腐食表面形状の凹凸に合うように、上記表面形状作成モデルに関するパラメータを算出し、上記算出されたパラメータによる上記表面形状作成モデルに基づく将来の腐食表面形状を算出し、上記腐食構造物における将来の強度劣化を上記将来の腐食表面形状によって予測する(ステップ3、4、11、12)。
(もっと読む)
画像測定機、およびデータ作成装置
【課題】画像測定機において、被検物の輪郭形状を測定する場合の測定時間を短縮させる。
【解決手段】画像測定機にステージ5上に載置された被検物6を撮像して撮像した画像を出力する撮像部4と、ステージ5上に載置された被検物6を撮像部4が撮像する撮像位置に対して相対移動させる移動装置と、制御ユニット2とを設け、制御ユニット2に、移動装置を制御して、予め設定された被検物の測定点の位置を撮像部4に相対移動させ、かつ撮像部4に撮像位置における被検物6の画像を撮像させて出力させる撮像制御部と、撮像部4が出力する画像内の複数の測定点の座標値を求める画像処理部と、被検物6の測定点の位置を撮像位置に移動させる際の複数の候補位置を求めて、複数の候補位置のうち、測定点が最も多く含まれる候補位置を次に移動する位置に決定する位置決定部とを設ける。
(もっと読む)
1 - 13 / 13
[ Back to top ]