
Fターム[2F065CC13]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | タイヤ (136)
Fターム[2F065CC13]に分類される特許
1 - 20 / 136
接触部検出装置および接触部検出方法
ゴム摩擦試験方法及びゴム摩擦試験装置
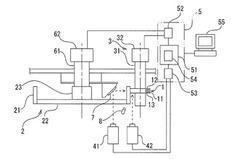
【課題】ゴム試験片の接触面形状を得るとともに接触面内の歪み分布を算出することで、ゴム試験片の摩擦摩耗特性を適切に評価できるゴム摩擦試験方法及びゴム摩擦試験装置を提供する。
【解決手段】本発明のゴム摩擦試験方法は、ドーナツ状のゴム試験片1の外周面11に画像解析用パターン13を形成するパターン形成工程と、ゴム試験片1の外周面11を、円筒部21が透明材料で形成された回転式ドラム2に接触させつつ、ゴム試験片1及び回転式ドラム2を回転させる摩擦試験工程と、摩擦試験工程と同時に、外周面11を円筒部21を通して撮影して外周面画像11Pを取得する画像取得工程と、取得した外周面画像11Pからゴム試験片1の接触面形状を得るとともに、外周面画像11Pに含まれる画像解析用パターン13に基いてゴム試験片1の接触面内の歪み分布を算出することにより、ゴム試験片1の摩擦摩耗特性を評価する評価工程と、を備える。
(もっと読む)
タイヤ形状検査方法、及びタイヤ形状検査装置

【課題】凹凸マーク上に重なるように凹凸欠陥が存在する場合にも、凹凸マークの高さ分だけを差し引いて凹凸欠陥のみの高さを算出・取得する。
【解決手段】凹凸マークが形成されたサイドウォール面を有するサンプルタイヤの画像を用いて、検査タイヤのサイドウォール面の形状欠陥を検査するタイヤ形状検査方法において、次の工程を実行する。まず、ティーチング作業工程として、サンプルタイヤのサンプル原画像において、凹凸マークの境界線を検出し、境界線を示すマスク画像を生成し、サンプル原画像からマスク画像に示された境界線に対応する領域を除き、残りの領域の高さを1又は複数のオフセット値で表す高さオフセット画像を生成する。次に、検査作業工程として、検査タイヤの検査画像から、高さオフセット画像を差し引くと共に、マスク画像が表す境界領域を除去し、得られた凹凸除去画像に基づいて、検査タイヤのサイドウォール面の形状欠陥を検査する。
(もっと読む)
タイヤ厚み測定装置
【課題】内圧を負荷した状態でタイヤの厚みを計測可能なタイヤ厚み測定装置を提供する。
【解決手段】上側ハーフリム84でタイヤ30の一方のビード部を支持し、下側ハーフリム26で他方のビード部を支持し、タイヤ内を密閉して内圧をかける。内側レーザー変位計66から外側レーザー変位計122までの距離からタイヤ内空部に配置した内側レーザー変位計66で計測したタイヤ内面までの距離とタイヤ外側に配置した外側レーザー変位計122で計測したタイヤ外面までの距離とを引き算する。これにより、内圧を負荷した状態でタイヤの厚みを計測することが出来る。
(もっと読む)
タイヤ状態検出方法及び装置
【課題】タイヤのスリップ角とキャンバー角を同時に効率よく測定でき、かつタイヤの交換を容易に行うことができるタイヤ状態検出方法及び装置を提供する。
【解決手段】撮像カメラ16で撮像した角度検出用回転体14の画像データを基にタイヤ1204のキャンバー角αを求め、さらに、撮像カメラ16で撮像した走行路面28の画像データと角度検出用回転体14の画像データを基にタイヤ1204のスリップ角βを求める構成にした。
(もっと読む)
シート状部材の巻き付け状態の検査方法及び検査装置
【課題】成形ドラムに巻き付けられたシート状部材の巻き付け状態を精度良く測定する。
【解決手段】ドラム周方向Cに沿った検出範囲Dを持つ二次元レーザセンサ12を用い、成形ドラム50をドラム幅方向Xに移動させながら、成形ドラム50に巻き付けられたシート状部材70に対し、シート状部材70の全幅を含む範囲で二次元レーザセンサ12によりレーザ光Lを照射して、反射面までの距離データを取得し、得られた距離データに基づいてシート状部材70の幅方向両端部78,80の位置を求める。好ましくは、成形ドラム50の全幅を含む範囲で上記距離データを取得し、成形ドラム50の幅方向両端部62,64の位置も求めることである。また、シート状部材70の接合部76が二次元レーザセンサ12の検出範囲D内に入るように位置合わせした上で、上記距離データを取得して、接合部76を検査することが好ましい。
(もっと読む)
走行車両のタイヤの変形状態を検出する検出装置および検出方法
【課題】簡単な構成で、効率よく正確に、走行車両のタイヤの変形状態を検出することが可能な、検出装置および検出方法を提供する。
【解決手段】走行車両5のタイヤ6の変形状態を検出する検出装置1は、撮像手段2と、記憶手段3と、判定手段4とを備える。撮像手段2は、走行車両5に搭載され、検出エリアPにおいて路面8に設けられた所定パターン7の画像を撮像するものである。記憶手段3には、タイヤ6の変形前に、検出エリアPにおいて撮像手段2によって予め撮像された所定パターン7の画像が基準画像として記憶されている。判定手段4は、検出エリアPにおいて撮像された画像と、記憶手段3に記憶された基準画像とを比較し、当該2つの画像における所定パターン7の変化に基づいて、タイヤ6の変形状態を判定する。
(もっと読む)
タイヤの欠陥検出方法
【課題】 タイヤ表面の薄広凸欠陥を高精度に検出することができるタイヤの欠陥検出方法を提供する。
【解決手段】 ステップS1を開始するまでに、予め連続的にスリット光像を含む2次元画像を取得しておく。ステップS1では、撮像された複数の2次元画像データから、スリット光像を抽出する。ステップS2では、抽出されたスリット光像から偏心によるぶれである偏心成分を除去する。ステップS3では、偏心成分を除去した光像に基づいて特徴量を算出し、ステップS4で、算出された特徴量に基づいて薄広凸欠陥を検出する。
(もっと読む)
トレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法
【課題】トレッドトランスファーとシェーピングフォーマとの芯ズレを、迅速に評価でき、生産ラインの精度低下を早期にフィードバックしうるとともに、装置コストの上昇を最小限に抑えうるトレッドトランスファー、及びそれを用いたトレッドトランスファーとシェーピングフォーマとの芯ズレ評価方法を提供する。
【解決手段】トレッドリングを、シェーピングフォーマに保持された生タイヤ基体の半径方向外側のトレッド貼付位置まで搬送しかつ保持するトレッドトランスファーである。トレッドトランスファーのリング状移動台に、トレッド保持リング11の軸心11jとは直角な基準面S0上にて前記軸心11jを通るX軸上に配される第1のレーザ距離センサ21と、このX軸とは直交する向きのY軸上に配される第2のレーザ距離センサ22とを設ける。前記第1、2のレーザ距離センサ21、22にてシェーピングフォーマの支持軸5までの距離を測定する。
(もっと読む)
タイヤ表面形状測定装置及びタイヤ表面形状測定方法
【課題】サイドウォール面の厚みやトレッド面の幅が様々に異なるタイヤのそれぞれに対して、同一の画像分解能で且つ高い精度で表面形状を検出する。
【解決手段】タイヤ表面形状測定装置において、タイヤの表面に照射されたライン光を撮像する撮像面が設けられた撮像素子9と、撮像面に結像したライン光の像が全て含まれるように、撮像面上にライン光の像の長手方向長さを備えた有効撮像領域Aを設定する撮像領域設定手段と、設定された有効撮像領域Aから予め定められた所定数の測定信号を抽出する画素データ抽出手段と、を備える。
(もっと読む)
ビードスティフナーの検査方法及び検査装置
【課題】ビードスティフナーの接合部分の検査において、基準形状と比較することなくビードスティフナーの形状を正確に測定して良否判定の精度を向上させるビードスティフナーの検査方法及び検査装置を提供する。
【解決手段】環状のビードコアと、帯状に成形され、延長方向の端部と端部とを互いに接合させてビードコアの外周に巻きつけられたスティフナーとを有するビードスティフナーの良否を判定する検査方法であって、ビードスティフナーの断面形状の形状データを取得する工程と、形状データからビードコアの頂点を検出する工程と、頂点から指定された領域内にスティフナーの端部の有無を検出する工程とを含み、スティフナーの端部の有無に基づいてビードコアとスティフナーとの接合の良否を判定する。
(もっと読む)
帯状部材の継ぎ目形状測定方法とその装置及び変位量計測装置
【課題】測定装置もしくは帯状部材を移動させることなく、帯状部材の継ぎ目形状を精度よく測定する。
【解決手段】レーザー照射手段12によりカーカスプライ20の表面にコードの延長方向に直交する方向に延長するライン光を入射角45°で照射し、その反射光のうちの前面散乱光R1を撮影手段13で直接受光し、正反射光R2を第1の光学素子14で反射させ側面散乱光R3を第3の光学素子15で反射させてそれぞれ撮影手段13に受光させる構成とすることで、前面散乱光R1による画像である上面像G1と、正反射光R2による画像である正面像G2と側面散乱光R3による画像である側面像G3とを撮影し、撮影された上面像G1と正面像G2と側面像G3とを用いてカーカスプライ20の継ぎ目部分を含む照射部を3方位から見たときの変位量h1,h2及びh3を求め、変位量h1,h2及びh3を用いてカーカスプライ20の照射部の厚さを求める。
(もっと読む)
タイヤ形状検査装置、及びタイヤ形状検査方法
【課題】ショルダ部を含めてタイヤの表面形状を検出することができるようにする。
【解決手段】タイヤ形状検査装置は、タイヤのトレッド部8に対してライン光を照射する第1ライン光照射手段10と、タイヤのサイドウォール部7に対してライン光を照射する第2ライン光照射手段12と、タイヤのショルダ部9から当該ショルダ部9を超えた領域までライン光を照射する第3ライン光照射手段13と、第1ライン光照射手段10、第2照射手段及び第3ライン光照射手段13が照射してタイヤ表面で反射したライン光を撮像する撮像手段16とを備える。
(もっと読む)
グリーンタイヤのキャップトレッドのオフセットを測定する測定方法、測定装置及び測定プログラム
【課題】グリーンタイヤのキャップトレッドのセンターオフセット位置を自動で検出する。
【解決手段】グリーンタイヤのキャップトレッドのオフセット測定方法であって、回転自在なドラム上に載置されたグリーンタイヤの形状を計測する工程と、計測結果に基づきグリーンタイヤの基準高さhを算出する工程と、基準高さhにおけるキャップトレッドの幅をセリアル側及び反セリアル側で算出する工程と、算出したキャップトレッドの幅に基づきキャップトレッドのセンターオフセットの異常を判断する工程と、を有する。
(もっと読む)
タイヤ寸法測定方法及びタイヤ寸法測定装置
【課題】タイヤの寸法測定において、正確かつ確実にタイヤ幅及びタイヤ外径を測定することを可能にするタイヤ寸法測定方法及びタイヤ寸法測定装置を提供する。
【解決手段】タイヤTをリム組みし、内圧が印加されたタイヤTと、当該タイヤTの幅方向に互いに対向して配置される測定手段41とを相対的に回転させながら、測定手段41を、タイヤTが1回転する間にタイヤ側面におけるタイヤトレッドからビードまでの範囲をタイヤ半径方向に沿って走査させ、測定手段からタイヤ側面までの距離の変位量に基づいてタイヤ幅寸法を測定するようにした。
(もっと読む)
タイヤ形状計測方法及びタイヤ形状計測装置
【課題】タイヤが走行しているときの接地形状及び接地面近傍を含むタイヤの表面形状を精度よく計測する。
【解決手段】タイヤTを路面11の走行路11aを構成する透明な強化ガラス板G上に接地させるとともに、強化ガラス板Gの表面に設けられた路面プールに白色の液体Lを投入し、移動機構163のボールねじ163aを回転させて路面11を保持するガイド部材162をガイドレール161に沿って前後方向に移動させながら、強化ガラス板GのタイヤTが接地する側とは反対側に設けられたCCDカメラ14により液体L中を走行するタイヤTの形状を撮影し、この撮影された画像からタイヤTの形状を計測するようにした。
(もっと読む)
タイヤトレッド面の断面形状ならびにトレッド溝の深さを測定する測定装置。
【課題】タイヤのトレッド面の断面形状とトレッド溝の深さを非接触で高速で測定する装置
【解決手段】この発明は、タイヤのトレッド面の断面形状を測定して、測定結果からトレッド溝の深さを計測する装置であり、タイヤのトレッド面近くに幅方向に並置するガイド機構と、トレッド面を単一光で照射する光源装置と、単一光の反射輝点を撮影するデジタルカメラと、光源装置並びにデジタルカメラをガイド機構に沿って移動させながら反射輝点を撮影する制御装置と撮影された画像データからトレッド面断面形状とトレッド溝の深さを測定する手段を備えたことを特徴とする。
(もっと読む)
接触面積測定装置および接触面積測定方法
【課題】新規な接触面積測定装置を提供することを目的とする。
【解決手段】接触面積測定装置は、試料7に接する光透過性基板6と、前記試料7とは反対側から、前記光透過性基板6に光を照射する照射手段と、前記試料7からの反射光と前記光透過性基板6からの反射光とから生じる干渉画像を取得する干渉画像取得手段12と、前記干渉画像の輝度値情報を補正処理し、得られた補正輝度値情報から輝度値ヒストグラムを作成する輝度値ヒストグラム作成手段14と、前記輝度値ヒストグラムから接触面積を算出する接触面積演算手段15を有し、前記補正処理は、割り算演算を有する式により、補正画像輝度を算出する。ここで、補正画像輝度は、式(補正画像輝度=(対象画像輝度/参照画像輝度)×定数)により算出することが好ましい。また、参照画像輝度は、荷重ゼロ時の元画像に対し、ガウスぼかしフイルター処理して求めることが好ましい。
(もっと読む)
角度測定装置、角度の測定方法、及びプログラム
【課題】従来技術と比較して、簡易に角度を測定する。
【解決手段】ビデオカメラ12によって取得された複数個の画像データに基づいて算出された指定時刻から単位時間経過後の複数のマーカの各々の三次元位置、初期距離、及び初期角度に基づいて算出された各二次元移動量と、追尾結果により得られる指定時刻から単位時間経過後の前記複数のマーカの各々の前記画像上での各二次元移動量との差の二乗和、及び複数のマーカの各々の画像上での各二次元位置と、追尾結果により得られる指定時刻から単位時間経過後の複数のマーカの各々の画像上での各二次元位置との差の二乗和が最小となるように、初期移動量、初期座標、及び初期角度を調整した場合における調整後の初期角度を測定対象平面の角度として測定する。
(もっと読む)
車載情報装置,ナビゲーション装置
【課題】車速パルスのパルス抜けが発生している期間中の車両の走行距離を高精度で算出できる車載情報装置を提供する。
【解決手段】車載情報装置1の制御部10は、カメラ23が撮影した車輪21の撮影画像を取得する。制御部10は、取得した撮影画像と記憶部11のテンプレートデータベース111に記憶されている車輪21のテンプレート画像とのパターンマッチングに基づいて車輪21の回転数を取得する。制御部10は、車速センサ22が出力する車速パルスのパルス抜けが発生するときは、取得した車輪21の回転数に所定の係数を乗ずることにより車両2の走行距離を算出することができる。
(もっと読む)
1 - 20 / 136
[ Back to top ]