
Fターム[2F065CC21]の内容
光学的手段による測長装置 (194,290) | 対象物−個別例 (8,635) | 光学要素 (628)
Fターム[2F065CC21]の下位に属するFターム
Fターム[2F065CC21]に分類される特許
1 - 20 / 294
弱測定を利用した信号の増幅装置
【課題】微弱信号を増幅可能な増幅装置を提供する。
【解決手段】増幅装置は、被測定系の観測量^Aを測定する際に、測定器と、初期状態が事前選択された被測定系を相互作用させ、次に被測定系の終状態を事後選択し、測定器の波動関数ξ(p)を用いて物理量の測定を行う。被測定系の量子状態の事前選択状態、事後選択状態それぞれのベクトルを|i>、|f>とするとき、式(1)の弱値AWが既知であり、AW=<f|^A|i>/<f|i>…(1)、測定器と被測定系の相互作用ハミルトニアンHが、測定器の運動量演算子^pおよび結合係数g(ただしg>0)を用いて式(2)で与えられ、H=g・δ(t−t0)・^A・^p…(2)、^A2=1のときに、測定器は、波動関数ξ(p)が運動量表示で実質的に式(3)となる。 (もっと読む)
(もっと読む)
カラーフィルタ基板の欠陥検査方法

【課題】従来の標高計算は局所領域のミスマッチングによる誤差が生じ、精度の高い標高情報が得られず、多大な処理時間がかかるという問題点がある。
【解決手段】カラーフィルタ基板上の局所領域の標高をステレオ方式で算出し欠陥判定をする欠陥検査方法において、ステレオ画像の一方の撮像画像である基本画像から局所領域を検出する工程、ステレオ画像の他方の撮像画像であって局所領域を含む参照画像を取得する工程、局所領域を含むマッチング領域をステレオ画像から選定する工程、マッチング領域から基準マークとなる部位を選定する工程、局所領域を鮮明化する工程、鮮明化された局所領域の中心座標を求め、基準マークからの距離を算出する工程、基本画像と参照画像における局所領域間の視差を求める工程、局所領域の標高を算出する工程、とを含むことを特徴とするカラーフィルタ基板の欠陥検査方法。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い横座標の校正方法によって横座標を校正する形状計測装置、及びその横座標校正方法を提供する。
【解決手段】複数の開口が形成され、これら複数の開口の配列によって校正パターンを形成するアパーチャー板20をワークWの被検面Wsの前面に配置する。この開口を通過すると共に、被検面Wsで反射され、再度開口を通過した測定光Lmを撮像素子5によって検出する。撮像素子上にて結像した校正パターンの横座標位置と、予め計測されている校正パターンの基準横座標位置とを、演算装置7によって比較することによって、形状計測装置1の横座標を校正する。
(もっと読む)
校正原器、形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い校正原器を提供し、一つの校正原器で種々の形状計測装置の横座標の校正を可能にする。
【解決手段】形状計測装置の横座標を校正する際にワークの代わりに配置される校正原器20に、入射角度に係わらず光を元来た方向に反射する再帰性光学素子21を設け、この再帰性光学素子21によって測定光Lmを反射させる。校正原器20は、再帰性光学素子21によって反射するため、種々の曲率半径の測定光を元来た方向に反射することができ、これによって、種々の形状計測装置の横座標の校正に使用することができる。
(もっと読む)
欠陥計測方法
【課題】光学素子の欠陥を簡便に発見、測定することのできる欠陥計測方法を提供する。
【解決手段】第一の観点に係る欠陥計測方法は、測定対象に光源から光を照射し、収束光にして測定対象に入射し、測定対象又は光源を、収束光の焦点が測定対象の一方の面から他方の面に至るまで移動させ、測定対象の一方の面と測定対象中に存在した欠陥との間の距離を計測し、距離に測定対象の屈折率を乗じた値を求め、一方の面からの前記欠陥の深さを計算する。
(もっと読む)
レーザ干渉測定装置の横座標校正治具および横座標校正方法
【課題】収束光学系を有するレーザ干渉測定装置における測定面上の位置の校正が簡便かつ高精度に行えるレーザ干渉測定装置の横座標校正治具および横座標校正方法を提供すること。
【解決手段】横座標校正治具10は、マーカを有する画像を投影する画像投影手段19と、画像投影手段19を第1回動軸線A1まわりに回動自在に支持しかつ第1回動軸線が所定の回動中心Cを通る第1支持機構11と、第1支持機構を第2回動軸線A2まわりに回動自在に支持しかつ第2回動軸線が回動中心Cで第1回動軸線A1と交叉する第2支持機構12と、を有する。
(もっと読む)
面形状計測装置
【課題】被検面の形状を高精度に計測する。
【解決手段】被検面10の形状を計測する面形状計測装置であって、光源1からの光を参照光と被検光とに分割して被検光を被検面10に照射する計測ヘッド110と、計測ヘッド110を収納する収納部と、光源1からの光を計測ヘッド110へ入射させ、被検面10に対する被検光の入射角度を変える変更部120と、被検面10で反射され計測ヘッド110に戻ってくる被検光と参照光との干渉光を検出する検出部と、計測ヘッド110の位置を計測する位置計測部116−118と、検出結果および計測結果を用いて被検面10の形状を求める処理部9とを備え、変更部120は、光源1からの光を計測ヘッド110の収納部の外側から計測ヘッド110に入射させ、光源1からの光が計測ヘッド110に入射する位置を変えることによって入射角度を変える。
(もっと読む)
エンコーダ及び校正方法
【課題】ポリゴンミラーなどの静止物体の校正に使用されるエンコーダに有用な技術を提供する。
【解決手段】光源と、マークが一定のピッチで配列され相対移動するスケールと、スケールのピッチによって決定される周期の整数分の一の大きさの周期で偏光方向が回転する直線偏光を生成する光学系と、生成された直線偏光を第1直線偏光と第2直線偏光とに分割する分割部と、固定配置された第1偏光板を含み、スケールが相対移動する間における、第1偏光板を通過した第1直線偏光の偏光方向の回転の数を得る第1ユニットと、直線偏光の偏光方向に対して回転する第2偏光板を含み、スケールが静止したときにおける第2直線偏光の偏光方向を検出することによってスケールが静止したときにおける直線偏光の1回転内の位相を得る第2ユニットと、第1ユニットおよび第2ユニットにより得られた結果を統合してスケールの移動量を出力する出力部と、を備える。
(もっと読む)
光学素子製造装置及び光学素子製造方法
【課題】手間や時間をかけることなく光学素子材料の厚さを随時測定することができる光学素子製造装置及び光学素子製造方法を提供する。
【解決手段】光学素子製造装置は、光学素子材料10を保持する光学素子保持具11と、光学素子材料10の加工面10aに当接し、該光学素子材料10を研削又は研磨する加工工具20を支持する加工工具支持装置21と、光学素子材料10と加工工具20との間の相対的な運動を与えるモータ及び運動制御部と、光学素子保持具11に保持された光学素子材料10に対して加工工具支持装置21に支持された加工工具20とは反対側に設けられ、光学素子材料10の厚さを非接触で測定する測定部30とを備える。
(もっと読む)
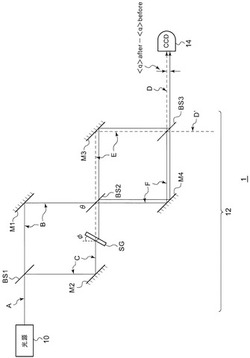
光学試験表面の形状を判定する方法及び装置
【課題】光学試験表面の誤差と適合光学系の誤差とを分離することを可能にする方法及び装置を提供する。
【解決手段】光学試験表面14の形状を判定する方法は、測定ビーム30の波面を適合光学系20により光学試験表面14の所望の形状に適合させ、光学試験表面14の形状を適合済測定ビームにより干渉測定するステップと、適合済測定ビームを光学試験表面に種々の入射角で照射し、測定ビームの波面を光学試験表面14との相互作用後にそれぞれ測定するステップと、個々の入射角ごとに測定された波面からの干渉測定結果に対する適合光学系20の影響を確定するステップと、光学試験表面の形状を、適合光学系20の確定された影響を干渉測定結果から除去することにより判定するステップとを含む。
(もっと読む)
物体をモニタする干渉計システム
【課題】投影レンズ内の1以上の光学素子の位置をモニタするシステムを提供すること
【解決手段】各々が入力放射から第1の波面及び第2の波面を導出し、かつ、第1及び第2の波面を合成して第1及び第2の波面の経路間の光路長の差に関する情報を備える出力放射を供給するように構成された複数の干渉計110,120を含み、各々が第1の波面の経路内に位置決めされた反射素子を備え、干渉計の少なくとも1つの反射素子が、第1の物体上に取り付けられる。本システムは、また、複数のファイバ111,121及び電子制御装置170を含む。各ファイバ111,121は、対応する干渉計110,120へのに送光、又は、対応する干渉計110,120からの受光に用いる。電子制御装置170は、干渉計110,120の少なくとも1つからの情報に基づいて、第2の物体に関する第1の物体の絶対変位をモニタする。
(もっと読む)
分光特性測定装置、その制御方法、及び分光特性測定方法、並びに分光特性測定装置の光路長差伸縮機構
【課題】外乱による信頼性の低下を抑えた分光特性測定装置とその制御方法、分光特性測定方法、及び光路長差伸縮機構を提供する。
【解決手段】本発明は、被測定物の測定点から多様な方向に向かって発せられた光を一つにまとめた後、分割光学系によって第1反射部と第2反射部に導き、前記第1反射部と前記第2反射部の相対位置に影響を及ぼす外乱を推定し、該外乱を解消するように前記第1反射部と前記第2反射部の少なくとも一方を移動させることにより前記第1反射部によって反射された第1反射光と前記第2反射部によって反射された第2反射光の光路長差を伸縮させつつ、前記第1反射光と前記第2反射光を結像光学系によって同一点に導き、その点の干渉光強度変化に基づき前記被測定物の測定点のインターフェログラムを求め、このインターフェログラムをフーリエ変換することによりスペクトルを取得する。
(もっと読む)
散乱計測定の改良システムおよび応用
【課題】回折構造体の測定パラメータモデルを利用する分光散乱システムおよび方法を提供する。
【解決手段】モデルの固有値を事前計算し、記憶し、ある共通の特性をもつ他の構造体に対して後に再利用する。1つ以上のパラメータの値を求めるために用いられる散乱データは、下敷フィルム特性に対して感度が低くなる波長におけるデータだけに制限することが可能である。代表的な構造体をスラブ200’(i)のスタックにスライスし、各スラブの近似を行うため四角形ブロック210,212,214,216,218のアレイを作成することによって三次元グレーティングに対するモデルを構築することが可能となる。
(もっと読む)
映像表示スクリーン、映像表示システム、および撮影装置検出方法
【課題】盗撮防止用の妨害画像としての非可視光を含む映像から該非可視光を除去して盗撮しようとする者を容易に検出する技術を提供する。
【解決手段】映像表示システム1は、映像を表示する映像表示部と、映像と共に、可視光以外の光を観察者に対して照射する非可視光発光部と、観察者が有する撮影装置から反射された非可視光を受けて、フレーム画像データを生成する非可視光受光部と、前記画像データを処理することにより、前記撮影装置の存在を検出する画像処理部143とを備える。画像処理部143は、背景画像を表すリファレンス画像データを参照し、前記フレーム画像データから前記背景画像の成分を除去する背景削除部150と、背景削除部150の処理後のフレーム画像データを、複数フレームにわたって平均化処理を行うことにより、フリッカを除去するフリッカ除去部151とを備える。
(もっと読む)
形状計測装置及び形状計測方法
【課題】グイ位相に伴って生じる計測誤差を低減する。
【解決手段】計測装置100は、光源から射出された光を参照光と被検光とに分割する分割部110と、前記参照光を反射する参照面111と、前記被検光を被検面113に集光する集光部112と、前記被検面でキャッツアイ反射された被検光と前記参照面で反射された参照光との干渉光を検出する第1検出器114とを含む計測ヘッド101と、前記計測ヘッドを前記被検面に沿って駆動する駆動部140と、前記計測ヘッドの位置を検出する第2検出器150と、前記被検光の前記被検面における回折によって生じるグイ位相を取得し、前記第1検出器により検出された干渉光の情報から前記被検光と前記参照光との間の位相差を算出し、前記第2検出器により検出された前記計測ヘッドの位置と前記取得されたグイ位相と前記算出された位相差とから前記被検面の形状を算出する処理部115と、を備える。
(もっと読む)
部分計測を合成する形状計測方法
【課題】被検面の形状を高精度に計測すること。
【解決手段】部分計測を複数回行い、それらを合成して全体の形状を得るスティッチ計測方法において、全体計測領域に対して、部分計測領域を複数配置するラティス構築ステップと、ラティスにおいて、全体計測領域の外部が存在する周辺部分計測領域に対しては、全体計測領域の内部の第1の領域と外部の第2の領域とに分割し、全体計測領域の外部が存在しない中央部分計測領域に対しては、周辺部分計測領域の分割パターンによって第1の領域と第2の領域とに分割するステップと、第1の領域上に第1の直交関数系を構築するステップと、全体計測領域における各部分計測領域に対して、第1の領域上に第1の直交関数系の各関数の線形結合を第1のシステムエラーとして定義するステップと、線形結合における係数を変数として含む整合性関数を構築するステップと、整合性関数を最適化することにより決定された変数からシステムエラーを算出するステップとを有することを特徴とする。
(もっと読む)
平面度測定装置
【課題】変位計と測定対象物との間の相対移動に起因する誤差を適切に補正すること。
【解決手段】測定対象物の一次元形状を測定する変位計と測定対象物との間の相対位置をずらしながら測定対象物の平面度を測定する平面度測定装置は、第1方向の第1測定ラインに沿って被測定面の一次元形状を測る第1測定と、第1測定ラインと第1交差点P2で交差する第2方向の第2測定ラインに沿って被測定面の一次元形状を測る第2測定と、第2測定ラインおよび第1測定ラインとそれぞれ第2交差点P3および第3交差点P1で交差する第3方向の第3測定ラインに沿って被測定面の一次元形状を測る第3測定と、第1測定による第1の一次元形状を示す第1の測定値列DL1、第2測定による第2の一次元形状を示す第2の測定値列DL2、および第3測定による第3の一次元形状を示す第3の測定値列DL3を第1交差点P2乃至第3交差点P1においてそれぞれ一致させるように第1の測定値列DL1乃至第3の測定値列DL3を補正する補正処理と、を行う。
(もっと読む)
3次元情報取得装置および3次元情報取得プログラム
【課題】対象と初期状態が異なる場合、この対象と初期状態との違いに基づく最適化処理の解の誤差を軽減すること。
【解決手段】位置姿勢逐次計測手段の初回起動時において最初に求めた初期フレームに対応する前記特徴点座標と前記カメラポーズ情報に対して、前記3次元座標および前記カメラポーズ情報の信頼度に応じて予め決められている加重値に基づく補正を行い、前記3次元座標の最適化を行う最適化処理手段を備えることを特徴とする。
(もっと読む)
形状測定法及び形状計測装置
【課題】 走査型干渉計による非球面測定において、被検非球面の頂点付近反射光を使用せずに被検非球面の走査量を高精度に測定する。
【解決手段】 被検面を多段階にステップ走査し、ステップ走査ごとに、撮像手段にて取得した干渉縞の形状測定領域に対応する位相、及び波長測定器にて前記光の波長、をそれぞれ計測する。
その後、被検面上の任意の点と参照球面の曲率中心との距離を、計測された前記位相と前記波長とをパラメータとして含む波数(整数)の関数として定義したうえで、隣接するステップ間の前記関数の関係から各ステップにおける波数を算出し、各ステップ間の移動量を算出する。
さらに、波数とその関数から被検面上の点Mと参照球面の曲率中心Oとの距離の測定値を算出すると共に、算出された移動量を用いて点Mと曲率中心Oの距離の設計値を算出し、前記測定値と設計値の差分より被検面の形状誤差を算出する。
(もっと読む)
1 - 20 / 294
[ Back to top ]