
Fターム[2F065DD00]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263)
Fターム[2F065DD00]の下位に属するFターム
消費電力低減 (26)
小型化;軽量化 (789)
分解能向上 (726)
S/N比向上、ノイズ低減 (1,080)
受光強度の増大 (70)
処理高速化 (1,900)
メモリ節約 (64)
測定系の異常検出 (49)
コントラストの増大又は制御 (217)
外乱成分対策 (899)
破損防止;測定器の保護 (118)
断熱 (14)
原点又は基準点の検出 (236)
Fターム[2F065DD00]に分類される特許
41 - 60 / 75
形状測定方法、形状測定システム及び形状測定装置
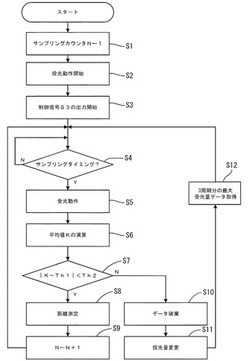
【課題】測定精度の低下を抑えつつ測定対象物の形状測定を行うことが可能な形状測定方法、形状測定システム及び形状測定装置を提供する。
【解決手段】予めサンプリングモードを実行して、XYステージ14を一定速度で駆動した場合における受光面19aでの経時的な最大受光量変化情報を取得する。そして、測定モード実行時には、その最大受光量変化に基づきXYステージ14の移動速度を変更しつつ、照射スポットQの各移動位置におけるワークWの距離測定を行う。サンプリングモード実行時において受光量変化が大きかった照射スポットQの各移動位置では、XYステージ14の移動速度を下げてフィーバック制御の追従遅れによる測定精度の低下を抑制する。
(もっと読む)
OCT観察器具、固定器具、及び、OCTシステム

【課題】 管腔の所望の位置にその先端を安定した状態で固定させる。
【解決手段】 該断層からの反射光を取得するOCTプローブと、OCTプローブが挿通される挿通路を有した枠体と、枠体の周方向に沿って所定の間隔で取り付けられ、その内部に流動体が封入され得る少なくとも三つの流動体封入手段と、任意の流動体封入手段に流動体を供給可能な流動体供給手段とを備えたOCT観察器具を提供する。
(もっと読む)
微小平面の角度測定装置
【課題】本発明は、試料の微小平面の角度を光学顕微鏡の接眼レンズ及び対物レンズの中間に2個のビームスプリッタを設置した光学系を用いて測定することにより、数十μm程度 (マイクロビッカース試験の領域に対応) の測定面に対し、高い精度で角度測定が行える装置を提供することを目的とする。
【解決手段】本発明の微小平面の角度測定装置は、試料テーブルに裁置される試料の微小平面の角度を光学系を用いて測定する装置において、光学系の光軸を通る参照光と試料の微小平面で反射した測定光とを撮像素子に入射させ、撮像素子における参照光と測定光の位置のずれから試料の微小平面の角度を測定するようにしたことを特徴としている。
(もっと読む)
OCT観察器具、及び、OCTシステム
【課題】 その先端を観察対象に相対的に固定させた状態で、且つ、当該観察対象を本来の性状で術者に観察させる。
【解決手段】 断層からの反射光を取得するOCTプローブと、OCTプローブがスライド可能に挿通される挿通路を有した枠体と、枠体の側壁に取り付けられ、その内部に流動体が封入されることにより、その一部が該管腔内に密着し得る流動体封入手段とを備えたOCT観察器具を提供する。
(もっと読む)
非接触型変形状態検出装置
【課題】 単純な構成でコンパクトであり、弾性体の内部に硬さの異なる部分を高精度で検出することができ非接触型変形状態検出装置を提供する。
【解決手段】 本発明に係る非接触型変形状態検出装置は、ノズルを通して空気が吹き付けられた弾性体表面の変形状態を検知する変形感知センサと、開閉弁を介して前記ノズルに加圧空気を供給する空圧源と、前記変形感知センサからの信号を受けこれを処理するデータ処理装置と、からなる非接触型変形状態検出装置であって、前記変形感知センサは、その先端から被測定部までの距離と被測定部における表面の傾斜角度に依存する出力特性を有するとともに、両者の出力曲線の勾配が同じ符号を有するものである。
(もっと読む)
歯科技工用の物体の形状を決定する方法およびこの方法を実施する装置
【課題】従来の技術のタイプの方法および装置を、歯科技工用の物体の形状を無接触で容易に決定することができるように改善することである。
【解決手段】マトリックスカメラ(32,34)は、第1の、第2のおよび第3のピクセルを有するカラーマトリックスカメラであり、マトリックスカメラによって、一方の種類のピクセル(第1のピクセル)に実質的に特徴的な波長範囲にある光を検出し、2つの第1の位置座標(Y座標およびZ座標)を決定するために、他方の種類のピクセル(第2のおよび第3のピクセル)のうちの少なくとも1の値を分析する。
(もっと読む)
XYθステージによる位置アライメントシステム
【課題】従来、人間によって指定又は調整を行なわなければならず問題であった基準マークの登録、XYθステージと同上システムとの間の座標軸の自由度調整、カメラの配置位置がXYθステージの表裏どちら側かの判定・調整および基準マークのカメラ視野内への捕捉を完全に自動化したXYθステージ位置アライメントシステムを提供する。
【解決手段】カメラの視野から幾何学的に特徴的なパターンを特別な画像処理アルゴリズムにより基準マークとして抽出・登録し、XYθステージの所定の動作に対するカメラの撮像画像上での動きを計測してXYθステージの座標軸の方向・符号と位置アライメントシステムのそれとの関係の調整と、カメラのXYθステージに対する配置位置がXYθステージの表裏どちら側にあるかの判定・同上システムでの調整を行い、また独自の視野移動方法で基準マーク含む探索パターンのカメラ視野内への捕捉を自動的に行う。
(もっと読む)
レチクル予備位置合わせセンサ用一体照明システムがあるエンドエフェクタ
【課題】予備位置合わせセンサ用一体照明システムがあるエンドエフェクタを提供する。
【解決手段】装置は、位置合わせマーカを有する要素を支持するように構成された第一支持構造を含む。装置は、第一支持構造上に一体形成され、位置合わせマーカを照明する光ビームを提供するように構成された光源と、要素を透過した光ビームを分析することによって、位置合わせマーカの位置を検出するように構成された少なくとも1つの検出器とも含む。このような装置は、第一支持構造に対して要素を位置合わせするために使用することができる。
(もっと読む)
レーザ測長器
【課題】計測基準点を正確に設定して、レーザ素子の自己結合効果を利用した距離計測を信頼性良く高精度に実行することのできるレーザ測長器を提供する。
【解決手段】計測対象物に向けて波長変調したレーザ光を照射すると共に、上記計測対象物にて反射した上記レーザ光が導入される自己結合型のレーザ素子の前面に設けられて、例えば前記レーザ素子を保護する透明カバー、または前記レーザ素子からのレーザ光を計測対象部位まで導く光ファイバ等からなる透明体の片面にだけ無反射防止処理を施し、上記透明体の無反射防止処理を施していない面を計測基準点として用いる。
(もっと読む)
画像表示装置、画像表示方法、およびその方法をコンピュータに実行させるプログラム
【課題】被写体画像の実際の大きさを画像と共に表示できるディスプレーを有するデジタルカメラ等の画像表示装置を提供すること。
【解決手段】レンズ11とメカ機構12を介しCCD13によって取得された被写体の撮像画像を表示する画像表示装置であって、CCD13における撮像画像での合焦点の位置情報を取得し、取得した位置情報に対応する被写体とCCD13間の距離情報を取得し、取得した距離情報に基づいて、合焦点における被写体の大きさを示すスケール情報を取得し、合焦点の位置情報と、距離情報およびスケール情報の少なくともいずれかとを、前記撮像画像に関連付ける。撮像画像に関連付けられた合焦点と、距離情報およびスケール情報の少なくともいずれかとを、撮像画像と共に表示するOSD制御部20を備える。
(もっと読む)
位置姿勢計測方法及び装置
【課題】 安定性と精度とが両立した位置及び姿勢の計測を行うことの可能な位置姿勢測定装置を提供すること。
【解決手段】 空間中に配置された指標を含む画像を撮像し、撮像画像から指標を検出する。複数の指標が検出された場合には、その分布範囲を求め、その大きさに応じて位置姿勢算出に適用するアルゴリズムを選択する(S3033、S3050、S3060)。例えば、指標が十分広い範囲に分布している場合は、撮像装置の位置及び姿勢の6パラメータを未知数として算出する(S3070)。指標の分布範囲が小さくなるほど、求めるべき未知パラメータの自由度を小さくする(S3035,S3025)。
(もっと読む)
三次元形状計測システム及び計測方法
【課題】 三次元形状計測装置の台数が増加しても短時間に三次元形状を計測可能で、大規模な形状計測も可能な三次元形状計測システム等を提供する。
【解決手段】 測定対象物107に正弦波格子パターンを投射する格子パターン投射手段101と、格子パターン投射手段を保持しながら、格子パターン投射手段を一定の方向に一定量ずつ移動させる格子駆動手段と、正弦波格子パターンが投射された測定対象物の画像を撮影する画像撮影手段100とを備えた複数台の三次元形状計測装置103〜106を有する三次元形状計測システムにおいて、各々の格子パターン投射手段は、互いに異なる波長の正弦波格子パターンを同時に投射する。投射される格子パターンの波長が異なるため、隣接する装置同士のパターン光が干渉しても三次元形状の計測が可能となり、各三次元形状計測装置が同時に計測することができる。
(もっと読む)
位置決め装置、露光装置およびそれを用いたデバイス製造方法
【課題】計測光路の温度揺らぎを抑えて位置計測精度を向上させて高精度な露光を行う。
【解決手段】可動子と固定子とを有する駆動部と、前記駆動部によって移動する移動体の位置を光を用いて計測する計測部と、気体を排気するための排気部とを備え、前記排気部を前記固定子に設けた。
(もっと読む)
3次元計測システム、3次元計測方法およびプログラム
【課題】3次元計測時の計測位置および姿勢を容易に決定し、3次元計測における操作性を向上させることが可能な技術を提供する。
【解決手段】3次元計測システム1は、CADデータに含まれるアノテーション情報に基づいて、計測対象物のプリミティブを特定する特定部34と、計測対象物のうち、特定されたプリミティブに相当する部分を撮影対象領域とするように、計測用カメラの位置および姿勢を決定する決定部35とを備える。
(もっと読む)
位置調整装置の制御方法、位置調整装置、及び露光装置
【課題】 センサ原点のドリフトを抑制する。
【解決手段】 被計測手段のリファレンスの位置を計測手段で定期的に計測して該計測結果を記憶手段に記録データとして記憶し、システムリセットが発生した時に、前記計測手段を初期化し(S23)、前記記憶手段に記憶された記録データのうち最新の記録データに基づいて原点オフセットを算出し(S25)、被計測手段の位置を前記計測手段で計測し(S26)、当該計測結果及び原点オフセットに基づいて定められる位置を位置調整動作の基準となる原点とする。
(もっと読む)
ステージ装置及びこのステージ装置を利用したカメラの手振れ補正装置
【課題】 可動部材に余計な負荷が掛からずに、位置検出を可能としたステージ装置及びこのステージ装置を利用したカメラの手振れ補正装置を提供する。
【解決手段】 固定支持基板10に対して、特定のX方向及びY方向に直線移動可能なXY移動部材30、31、36を備え、固定支持基板に、X用光源51とその受光位置をX方向について認識可能なX用受光部材52とをX方向に並べて固定し、XY移動部材に、X用光源から出た光を反射してX用受光部材に導くX用反射部材53を固定したことを特徴とするステージ装置。
(もっと読む)
測定装置及びその調整方法
【課題】 現状の方式では調整できない照明瞳面の「光量ムラ」を極力抑えて、高集積化や記憶容量の増加の下で、「照明光のムラ」を極力排除すること。
【解決手段】 光ファイバ4の出射端面の瞳面状態の「光量ムラ」が比較的大きい場合に、焦点切換用レンズ31により、CCDカメラ18の撮像面の焦点を、ウェハ14の試料から、光ファイバ4の出射端面の照明瞳面に切り換える。画像処理部19で、光ファイバ4の出射端面の照明瞳面の「光量ムラ」を算出・解析し、この解析結果に基づいて、照明光学系内で、光ファイバ4の出射端面の位置を調整する。これにより、光ファイバ4の出射端面の照明瞳面を、「光量ムラ」の少ない箇所に切り換えることができる。
(もっと読む)
表面反射型位相格子
【目的】金属格子の表面を透明誘電体膜で成膜することで、金属格子の安定性を向上させる。
【構成】断面形状が矩形状のレリーフ型回折格子を有する表面反射型位相格子21は、基板22に第1の金属膜23が成膜され、その上層に第1の金属膜23と異なる材質から成る第2の金属膜24による厚さdの断面矩形状の金属格子25が形成されている。なお、この金属格子25の厚さdは一次回折が最大となるように設定され、更に金属格子25の表面及びその間に露出した第1の金属膜23上に、SiO2から成る透明誘電体膜26が成膜されている。
(もっと読む)
非接触画像測定機の測定方法
【課題】非接触測定機の測定範囲よりも広い範囲を、非接触測定機を移動しながら簡単且つ高精度に測定できるようにする。
【解決手段】複数のマーカー42、46をワーク設置用プレート40上に分散配置して、値付けし、該プレート40上に配置したワーク30、30’、30a、30b、30cを、前記マーカー42、46の一部も測定範囲14に含めて、非接触測定機10により測定し、前記マーカー42、46の位置とワーク30の関係により、各測定点の測定値を合成する。
(もっと読む)
露光装置及びマイクロデバイスの製造方法
【課題】 第1ステージまたは第2ステージの位置ずれによる投影位置のずれを正確に補正できる露光装置を提供する。
【解決手段】 露光装置において、マスクと感光性基板のうちの一方を保持して移動する第1ステージ15の位置を計測する第1位置計測手段17X,17Yと、計測された第1ステージの位置に基づいて、マスクと感光性基板のうちの他方を保持して移動する第2ステージ20の目標位置を算出する目標位置算出手段50と、算出された第2ステージの目標位置に基づいて、第2ステージの位置を調整する調整手段18X,18Yと、調整された第2ステージの位置を計測する第2位置計測手段19X,19Yと、第2ステージの目標位置と第2ステージの位置との差分を算出する差分算出手段50と、算出された差分に基づいて、投影光学系が有する投影光学系によるマスクのパターンの感光性基板上における投影位置を補正する補正手段120とを備える。
(もっと読む)
41 - 60 / 75
[ Back to top ]