
Fターム[2F065DD00]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263)
Fターム[2F065DD00]の下位に属するFターム
消費電力低減 (26)
小型化;軽量化 (789)
分解能向上 (726)
S/N比向上、ノイズ低減 (1,080)
受光強度の増大 (70)
処理高速化 (1,900)
メモリ節約 (64)
測定系の異常検出 (49)
コントラストの増大又は制御 (217)
外乱成分対策 (899)
破損防止;測定器の保護 (118)
断熱 (14)
原点又は基準点の検出 (236)
Fターム[2F065DD00]に分類される特許
1 - 20 / 75
多方向近接センサー
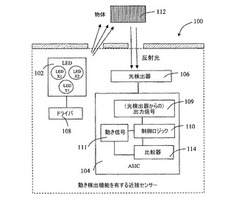
【課題】多方向の動き検出機能を有する近接センサーを提供する。
【解決手段】近接センサーは、ASIC(特定用途向け集積回路)チップ104、特定のシーケンスで光を放射するように構成された少なくとも3つの光源102、及び、光を受光して出力信号を生成するように構成された光検出器106を備える。多方向近接センサーは、少なくとも1つの側面を有する第1の近接センサーと100、第1の近接センサーの該少なくとも1つの側面にほぼ平行な面の上における物体の動きを検出するように構成された第2の近接センサーを備え、この場合、該第2の近接センサーは第1の近接センサー100に接続される。多方向動き検出近接センサーはPCBを有し、その場合、2以上の近接センサーを、PCBに配置して、多方向における動きを検出できるように一体化する。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法

【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
表面検査装置及び表面検査方法
【課題】表面検査における検出感度の低下、及び熱ダメージの増加を抑制しつつ、検査時間を短縮することができる表面検査装置及び表面検査方法を提供する。
【解決手段】被検査物を主走査として回転移動させると共に副走査として並進移動させ、半導体ウエハ100の表面に照明光21を照射して、その照明光21の照射範囲である照明スポット3を形成し、照明スポットからの散乱・回折・反射光を検出し、その検出結果に基づいて半導体ウエハ100の表面上または表面近傍内部に存在する異物を検出する表面検査装置において、副走査の並進移動速度を、半導体ウエハ100の主走査における回転中心から照明スポットまでの距離に応じて制御する。
(もっと読む)
計測装置
【課題】管状披検体内壁の全周観察・計測時に側方視野を持つ光切断計測装置の視野方向を容易に選択操作可能とすることで、管状被検体内壁の傷部分の観察や計測の操作性を著しく改善した光切断法を用いた計測装置を提供する。
【解決手段】
挿入部の挿入方向軸に対して前方視野を有するように装着された直視撮像手段と、挿入方向軸に対して挿入方向軸の周りを回転可能とした側方の視野をもつ光切断法計測ヘッド部を有し、回転する光切断法計測ヘッド部の視野方向を検出し視野方向を画像として、直視撮像モジュールによる画像内に重畳して表示し、回転方向を制御することで光切断法計測ヘッド部の視野方向を選択可能とした光切断法を用いた計測装置。
(もっと読む)
位置計測システム
【課題】 特定のカメラの撮影範囲外にある対象物であっても別のカメラを介することによりその対象物の位置を計測することができる位置計測システムを提供する。
【解決手段】 位置計測システムは、位置関係の分かっている3つ以上の基本標識を有する標識セット1と、標識セット1を撮像するカメラ10と、カメラ10に取り付けられる位置関係の分かっている4つ以上の基本標識を有する標識セット2と、標識セット2を撮像するカメラ20と、カメラ10で撮像した標識セット1の画像から標識セット1の位置を演算し、カメラ20で撮像した標識セット2の画像からカメラ10の位置と角度を演算し、このカメラ10の位置と角度に基づいて、カメラ10のカメラ座標15を基準とした標識セット1の位置をカメラ20のカメラ座標25を基準とした位置として演算する演算部30とを備える。
(もっと読む)
外観検査装置、外観検査方法、画像処理方法及びこれを利用した外観検査装置
【課題】簡単な装置構造で、目視検査に近い多数の条件にて外観異常部と表面深さ異常部を総括的に評価して検査できる。
【解決手段】円柱周面検査装置10は、円柱体1の周面に明視野から暗視野の縞模様を映す照明部12と、円柱周面に投光するラインレーザ投光器と、円柱周面を撮像するカメラ14と、撮像画像データから円柱体1の異常部を抽出する画像処理装置30を備えている。画像処理装置30は、照明条件及び撮像角の違う複数の展開画像を位置を合わせて仮想画面階層配列に再構成し、層別画像データより円柱体1の外観異常部を抽出する外観異常検査部と、画像データよりラインレーザ光が投光された円柱周面の位置を割り出して表面深さ異常部を抽出し、位置を合わせて階層の仮想画面配列にマッピングする表面深さ異常検査部と、目視検査に似せて異常抽出条件の違った多数のデータから総括的に円柱体1の合否判定する判定部とを備えている。
(もっと読む)
2波長レーザ干渉計および2波長レーザ干渉計の光軸調整方法
【課題】波長の異なる2種類の光波の光軸のずれに基づく測定誤差を防止し、高精度な測定が実現可能な2波長レーザ干渉計を提供する。
【解決手段】波長の異なる2種類のレーザ光L1,L2を出射する2波長レーザ光源11と、2種類のレーザ光をそれぞれ参照光L11,L21と測定光L12,L22に分割する光分割手段、および、参照光および測定光が参照面および被測定面によって反射された光を重ね合わせる光重ね合わせ手段を有する2波長ビームスプリッタ15と、この重ね合わされた光から、波長ごとに、被測定面の変位量を求め、これら波長ごとに求められた変位量を用いた演算によって空気屈折率補正された被測定面の変位量を求める演算部24とを備える。2波長レーザ光源と光分割手段との間には、2波長レーザ光源から出射された波長の異なる2種類のレーザ光を一旦分離したのち互いの光軸を重ね合わせる光軸重ね合わせ光学系13が設けられている。
(もっと読む)
干渉計、測定方法及び光学素子の製造方法
【課題】被検光学素子の光学性能を高精度に計測すると共に長寿命な干渉計を提供する。
【解決手段】光源101aからの光Lを利用して被検光学素子TS、TBの光学性能を干渉縞として計測する干渉計100は、干渉縞を撮像する撮像素子109と、各被検光学素子に対して干渉縞を生成するのに使用される参照波面を変更する参照波面変更手段106と、径の異なる複数の被検光学素子の間で撮像素子における干渉縞の径が等しくなるように倍率を調整する倍率調整光学系108と、径が小さな被検光学素子よりも径が大きな被検光学素子に対する前記撮像素子における前記光の光強度が小さくなるように前記光源の出力を制御する制御ユニット110と、を有する。
(もっと読む)
校正用治具及び校正方法
【課題】本発明の目的は、ワークの三次元形状情報を広範囲測定した際のデータ校正を良好に行うことのできる校正用治具を提供することにある。
【解決手段】回転ステージ12上のワーク24を異なる角度から分割測定した複数データを統合し該ワーク24の三次元形状情報を得る広範囲測定を行う際、該プローブ14高さを変える毎に該ステージ12に置かれ、該ステージ12回転軸情報及び該回転軸上での高さ情報を得るため該プローブ14により視野内のワーク24上の各点の位置情報が測定される校正用治具22であって、該回転軸情報を得るための互いに平行でない二平面60,62と該高さ情報を得るための高さ位置校正用特徴部位64とを備え、該平面60,62上の各点の位置情報に基づく平面60,62情報により決定される交線66が回転軸26と一致するように該ステージ12に置かれ、該部位64が所定の高さに設けられていることを特徴とする校正用治具22。
(もっと読む)
非接触三次元計測方法及びその装置
【課題】本発明の目的は、ワークの三次元形状情報の広範囲測定を良好に行うことのできる非接触三次元計測装置を提供することにある。
【解決手段】非接触プローブ12の測定位置を二軸方向に平行移動することによりワーク20を異なる測定位置から分割測定し該分割測定された複数のデータを統合することにより該ワーク20の三次元形状情報を得る広範囲測定を行う非接触三次元計測装置10であって、測定位置に静止した状態で視野に入るワーク20上の各点の位置情報を検出し該測定位置でのデータを得る該プローブ12と、該プローブ12の測定位置を二軸方向に平行移動する位置変更手段16と、該プローブ12の測定位置情報を得る位置検出手段16と、該非接触プローブ12の平行移動量に基づき該隣り合う測定位置で得られた複数データの平行移動方向の位置合わせを行う統合手段18とを備えたことを特徴とする非接触三次元計測装置10。
(もっと読む)
タイヤトレッドゴムの長さの測定装置
【課題】タイヤトレッドゴムの長さを高精度で測定する。
【解決手段】トレッドゴムの前端面を幅方向の全長にわたって撮影する第1撮影手段と、トレッドゴム長さに対応する寸法を離して位置させ後端面を幅方向の全長にわたって撮影する第2撮影手段と、前端面の通過を検知すると第1、第2撮影手段に同期したトリガー信号を送信する検知手段と、前端、後端面に光を照射し、前端、後端面の各傾斜面と上端エッジとを識別化させる第1、第2照明手段と、前端、後端画像とを取り込み、第1撮影手段の基準ラインと前端画像のエッジとの距離と、第2撮影手段の基準ラインと後端画像のエッジとの距離とを、基準ライン間の距離に加えてトレッドゴム長さを求める演算処理手段と、トレッドゴム長さを表示する表示手段とを備えている。
(もっと読む)
外観検査方法及び外観検査装置
【課題】複雑な立体形状の羽根車の外観を検査する際に、誤検出が少なく検査精度が高く、形状が異なる多品種の羽根車の検査に短時間で対応することが可能である、外観検査方法及び外観検査装置を提供する。
【解決手段】基準となる羽根車の画像に所定の画像処理を施すことで、照明の不均一となり易い部分を非検査領域として不透明化し検査領域を透明化したマスク画像Bを作成し、該マスク画像Bを基準となる羽根車の画像に重ねたテンプレート画像を作成しておいて、羽根車1に照明光を照射して撮像した原画像Aに前記マスク画像Bを重ねた合成画像C(検査用画像)と前記テンプレート画像を画像処理することで、羽根車の欠陥を検出する。
(もっと読む)
二次元位置検出装置
【課題】従来のこの種の手振り式の入力装置においては、多次元の検出が要求されると、多数の発光素子、受光素子を配置しなければならないものとなり、検出部、演算部共に煩雑化、大型化、高コストとなる問題点を生じていた。
【解決手段】本発明により、光学部品を有する1つの発光素子と、2つの受光素子とから成り、受光素子の一方には、発光素子を中心とする略扇状とした照射範囲に対しての放射角方向への感度に角度を変数とする受光感度特性を持たせ、他方の受光素子の受光感度特性との演算により、照射範囲内での発光素子からの遠近方向への移動量、及び、それと直交方向への移動量の二次元移動量もしくは位置検出を可能としする二次元位置検出装置として部品点数を低減し、課題を解決する。
(もっと読む)
道路形状推定装置
【課題】 不定間隔で存在する路側の立体物を利用して道路形状を精度良く推定する。
【解決手段】 撮像手段Cで自車前方の画像を撮像し、立体物抽出手段M1で画像内に存在する立体物を抽出し、特徴点抽出手段M2で立体が地表面に接する特徴点を抽出し、走行状態検出手段Sで検出した自車の走行状態に応じて特徴点補正手段M3で特徴点の位置ずれを補正し、残像生成手段M4で前記位置ずれ補正後の特徴点と自車の走行状態とから該特徴点の残像を生成し、消失点算出手段M5で相互に対応する特徴点および残像を通る複数の直線が交差する消失点を算出し、道路形状推定手段M6で消失点を通る直線のうちで自車の左右両側に最も近いものに基づいて道路形状を推定するので、道路に白線が存在しない場合や、立体物がまばらな場合であっても、道路形状を精度良く推定することができる。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】検出領域が異なる複数のアライメント系AL21〜AL24を用いてウエハW上の異なるウエハマークWMB,WMC,WMD,WMEを検出する工程と、ウエハWの位置情報を計測しながらウエハWを移動しつつ、ウエハマークWMB〜WMEを別のアライメント系AL1の検出領域に順次移動して、これらのマークを検出する工程と、アライメント系AL21〜AL24による検出結果とアライメント系AL1による検出結果とに基づいて、アライメント系AL21〜AL24による検出結果のオフセットを求める工程とを有する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】複数の検出領域を備えたアライメント系でウエハマークを検出するマーク検出方法であって、第1検出領域AL1fで検出した基準マークFMを、基準マークFMを備えたステージの位置情報を計測しつつ第2検出領域AL24fに移動して、第2検出領域AL24fで基準マークFMを検出し、検出領域AL1f,AL24fで基準マークFMを検出した結果と、位置計測装置からの位置情報とを用いて、検出領域AL1f,AL24fの相対位置情報を求めた後、検出領域AL1f,AL24fで実質的に同時に別の位置のウエハマークを検出する。
(もっと読む)
3次元計測方法および3次元計測装置
【課題】計測対象部位が限定される場合でも、計測結果を計測対象物の全体像に対応づけてわかりやすく示した画像を表示する。
【解決手段】特定の点や領域に計測対象が限定されたワークを対象に、このワークを正面視する方向から撮像するカメラと、斜め上方から撮像するカメラとにより撮像し、各計測対象部位の高さを計測する。そして、計測処理に使用した正面視画像の各画素を、当該画像の座標系を構成するx,y軸と高さを表すz軸とによる3次元座標系に仮想配置して、透視変換を行うことにより、計測結果を表す処理結果画像を生成する。各画素のうち、高さ計測の対象とされた画素には、z座標として計測値が設定され、その他の画素のz座標はゼロ値に設定される。また、画像中の計測対象点P1´〜P4´や計測対象領域R´には、位置の識別のための+マークや高さを表す補助線が設定される。
(もっと読む)
干渉縞安定化装置およびそれを用いた非破壊検査装置
【課題】参照光と検査対象物で反射され周波数変調された信号光との干渉縞を安定化することが可能な干渉縞安定化装置、および検査対象物の内部欠陥の検出精度の向上が可能な非破壊検査装置を提供する。
【解決手段】非破壊検査装置は、検出用レーザ11と、弾性波励起用レーザ21と、信号光と参照光とを干渉させ検査対象物Obの振動を検出する振動検出手段30と、干渉縞安定化装置40とを備える。干渉縞安定化装置40は、信号光から分岐された補正用信号光と参照光から分岐された補正用参照光との干渉縞を検出する干渉縞検出手段41と、補正用参照光を分岐する前の参照光の光路上に配設され参照光の波面を制御する波面制御用ミラー42と、干渉縞検出手段41により検出される干渉縞の安定状態からの位相シフトを抑制するように波面制御用ミラー42の位置を制御する制御手段43とを備える。
(もっと読む)
被測定面の測定方法
【課題】ピッチング誤差やローリング誤差を抽出でき高精度な測定を行える被測定面の測定方法を提供する。
【解決手段】被測定面を回転させる場合における回転軸線の振れに相当するティルトモーション誤差は、被測定面を高精度に測定する上で除去すべきでものである。従来技術によれば、かかるティルトモーション誤差を簡易に除去する方法がなかった、これに対し本発明によれば、前記被測定面を備えた部材を回転させながら、前記第1の2次元角度センサにより前記第1の測定点の面法線角度を2次元で測定し、前記第2の2次元角度センサにより前記第2の測定点の面法線角度を2次元で測定し、前記第1の2次元角度センサの測定値に基づいて、前記第2の2次元角度センサの測定値からティルトモーション誤差を排除することができる。
(もっと読む)
1 - 20 / 75
[ Back to top ]