
Fターム[2F065DD06]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | 処理高速化 (1,900)
Fターム[2F065DD06]に分類される特許
1 - 20 / 1,900
情報処理装置、情報処理装置の制御方法、およびプログラム
車体寸法計測装置及び車体寸法計測方法
表面検査装置及び表面検査方法
傾斜測定装置およびその方法
検査システム及びレシピ設定方法
検査装置
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
同期されたユーザインタフェース機能を含むマシンビジョンシステムプログラム編集環境
部品実装装置および部品実装方法
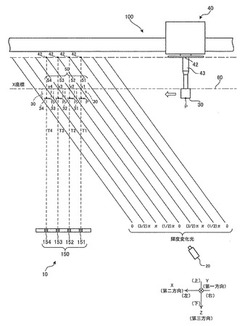
【課題】物体の形状認識を正確に、かつ、高速に行うことのできる部品実装装置を提供する。
【解決手段】撮像部10と、輝度変化光を斜めから照射する照射部20と、対象物および基準点42を撮像部および照射部に対し第二方向に相対的に移動させて、対象物および基準点を撮像対象領域に対して通過させる移動部40と、基準点データと対象物データとを取得するデータ取得部と、それぞれの撮像のタイミングT1〜T4での基準点位置と基準点基位置との位置ずれを導出する位置ずれ導出部と、それぞれの撮像のタイミングの対象物基位置に対して、導出された位置ずれを加算して得られた対象物の測定部位の位置に対応する輝度値を取得する輝度値取得部と、取得された輝度値に基づいて、位相シフト法による波形を作成する波形作成部とを備える。
(もっと読む)
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法

【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
トレンチ深さ測定装置及びトレンチ深さ測定方法並びに共焦点顕微鏡
【課題】トレンチ幅が照明光の波長と同程度の高アスペクト比のトレンチの深さを測定できるトレンチ深さ測定装置を実現する。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
(もっと読む)
対象検出装置および対象検出方法
【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
無人走行体の遠隔操縦システム
【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
距離計測システム
【課題】計測対象物に添付した計測用コードを撮像し、画面上に表示した計測コードの画像上の2点を指定することで、2点間の距離を計算し、画面上に表示する距離計測システムを提供する。
【解決手段】計測用コード10と、撮像手段23と、計測用ソフトウェア29、及び端末機20と、からなる距離計測システムであって、端末機20は、計測用ソフトウェア29をインストールされ、表示部22に撮像手段23によって、計測用コード10を測定物1に添付した状態を撮像して作製した画像データを表示し、計測用ソフトウェア29は、表示部22に表示された計測用コード10を判読し、画像データ中の計測用コード10に対して指定された間隔の距離値を算出することができ、距離値を、表示部22に表示された画像データに重ねて表示すること、及び計測用コード10は、一次元コード又は二次元コードからなる。
(もっと読む)
表面欠陥検査方法及び表面欠陥検査装置
【課題】 表面欠陥検査方法及び表面欠陥検査装置に関し、欠陥検査の検知精度の向上を図るために位相シフトを用いつつ検査時間を低減する。
【解決手段】 互いに異なった複数の波長をそれぞれ独立に変調した明暗パターンをパターン平面上で互いに変調させて合成照明パターンを合成し、前記合成した合成照明パターンを検査対象物に照射し、前記検査対象物からの前記合成照明パターンの反射パターンを撮像して波長毎の画像を一括して取得し、前記撮像した画像を波長毎に分解して前記検査対象物の表面の凹凸欠陥を判別する。
(もっと読む)
半田位置解析装置、基板外観検査装置、半田位置解析方法および半田位置解析プログラム
【課題】部品の端子が接続されない基板上の半田の位置を取得することができる技術の提供。
【解決手段】基板上の半田の印刷位置を取得し、部品の端子が接続される前記基板上の半田の位置である接続位置を取得し、前記印刷位置から前記接続位置を除外した位置を前記部品の端子が接続されない基板上の半田の位置である非接続位置として取得する。
(もっと読む)
光ファイバのマーク検出装置及びその検出方法
【課題】光ファイバの素線に付されたマークの検出をインラインで実行可能とする光ファイバのマーク検出装置を提供する。
【解決手段】光ファイバの素線(21)に付与されたマーク(M)を検出する装置であって、レーザ光(LS1)を出光する出光部(11a)及びレーザ光(LS2)を受光する受光部(11b)を有し、受光部(11b)で受光したレーザ光(LS2)の強度に応じた信号を出力する検出部(11)と、レーザ光を反射する底面(12b)を有する溝部(12a)が設けられた素線案内部材(12)と、を備える。検出部(11)は、素線(21)を素線案内部材(12)の溝部(12a)内における底面(12b)に接触させた状態で、素線(21)を間にして素線案内部材(12)と対向すると共に出光部(11b)からのレーザ光(LS2)が少なくとも素線(21)に照射されるよう配置されている。
(もっと読む)
画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境
【課題】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのマシンビジョンシステム編集環境を提供する。
【解決手段】画像取得動作の連続ストリームが実行モード中に実行されるパートプログラムのためのマシンビジョンシステム編集環境が提供される。一形態では、新しい共通シンタックス及び表現が利用され、2つのステージで実行されるパートプログラムを実行し、そのような連続画像取得動作が通常動作と同じ方法で記録される。最初のステージでは、画像取得の連続ストリームを持つパートプログラムの一部が画像取得動作のためにスキャンされ、画像取得プロセスが開始された後に、画像を取得するために最も効果的な命令が決定される。そして、第2のステージでは、画像取得プロセスが実行されている間に、パートプログラムの一部が再度スキャンされ、そして画像解析動作が実行される。
(もっと読む)
螺子類の寸法測定装置
【課題】 本発明の解決課題は、ワーク寸法を連続的に測定できる螺子類の寸法測定装置を提供することにある。
【解決手段】 本発明の螺子類の寸法測定装置は、移動通路と分離手段と搬送体と光学式測定手段を備えたものである。本発明では、螺子類を良品と不良品に仕分ける仕分け手段や、移動通路への螺子類の供給を停止する供給制御機構を設けることもできる。分離手段を螺子類の移動速度よりも速く回転する回転式のローラ或いはベルトとし、回転中に螺子類に接触して先頭の螺子類を後続の螺子類から離せるようにしてもよい。搬送体は螺子類の頭部上面に接触して移動通路側に押すことのできる回転ベルトとしてもよい。回転ベルトは数本の螺子類の頭部上面に接触する長さとしてもよい。発光素子と受光素子を螺子類の軸部の軸方向に離して二対配置し、二対の配置間隔を螺子類の公差と同一又は略同一寸法としてもよい。
(もっと読む)
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置
【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
1 - 20 / 1,900
[ Back to top ]