
Fターム[2F065DD07]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | メモリ節約 (64)
Fターム[2F065DD07]に分類される特許
1 - 20 / 64
3次元形状データ処理方法、3次元形状データ処理装置
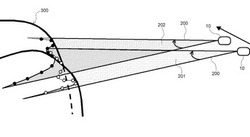
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
振動計測装置および振動計測方法

【課題】振動の測定および解析を容易に行うことができるようにする。
【解決手段】高速度カメラ4の撮像部4aは、ケーブル10の各実測点に設けられたマーカーシール5が正反射する光を撮像する。高速度カメラ4の計算処理部4bは、撮像部4aによる撮像と並行して、撮像部4aが撮像した画像毎に各実測点の座標を求める。高速度カメラ4のメモリ4cは、各実測点の座標に係るデータを記憶する。コンピュータ6は、メモリ4cに記憶された各実測点の座標に係るデータを用いてケーブル10の振動分析を行う。
(もっと読む)
車両周辺監視装置
【課題】車両周辺監視装置において、実寸と相関性の高いテンプレートサイズを設定することができ、その結果、良好な画像処理結果を得ることができ、また、不必要に大きいテンプレートサイズを設定することがないため、計算量の増加を防ぐことにある。
【解決手段】制御手段(4)は、各実空間座標位置に予め設定された3次元寸法の仮想ブロックを想定し、この仮想ブロックが画像上に表示されるサイズを記憶する記憶手段(6)と、この記憶手段(6)に記憶された表示サイズから一つの画素の周辺画素を一群のデータとして画像処理を行うためのテンプレートサイズを設定するテンプレートサイズ設定手段(7)と、このテンプレートサイズ設定手段(7)により設定されたテンプレートサイズを用いて撮像手段(3)により撮像された画像を処理する画像処理手段(8)とを備える。
(もっと読む)
姿勢認識装置、姿勢認識方法、プログラム及び記録媒体
【課題】載置面上に自由に置かれた物体を高速に認識する。
【解決手段】安定姿勢計算部6は、3次元モデル情報記憶部5から3次元モデルの情報を読み出して、物体が載置面上で静止すると予測される物体の姿勢に対応する3次元モデルの安定姿勢を計算する。2次元投影画像生成部7は、安定姿勢計算部6で計算された安定姿勢の3次元モデルを観測して得られる2次元投影画像を生成する。2次元投影画像記憶部8は、2次元投影画像生成部7により生成された2次元投影画像を記憶する。載置面上に載置された物体の姿勢を認識する際には、画像照合部9は、撮像部101により撮像されて得られた撮像画像と、2次元投影画像記憶部8に記憶された2次元投影画像との一致度を計算する画像照合を行う。姿勢認識部10は、一致度が最も高い2次元投影画像に対応する3次元モデルの姿勢を、物体の姿勢として認識する。
(もっと読む)
対象物検出装置、対象物検出方法
【課題】処理負荷を大きくすることなく、検出対象物が遠近離れて複数存在する場合の検出精度を高める。
【解決手段】入力画像に関する撮像対象までの距離情報を取得する距離情報取得部と、距離情報に基づいて、入力画像に対して距離区分を設定する距離区分設定部と、距離区分毎に、探索ウィンドウのサイズを設定するウィンドウサイズ設定部と、距離区分毎に、設定されたサイズの探索ウィンドウを用いて入力画像のスキャンを行なうスキャン部と、探索ウィンドウ内から検出対象物の検出処理を行なう検出処理部とを備えた対象物検出装置。
(もっと読む)
3次元環境復元装置、3次元環境復元方法、及びロボット
【課題】動的な環境下においても、効率的にマップ更新処理を可能とする。
【解決手段】3次元環境復元装置10は、環境を3次元で計測する環境認識センサ5と、計測された計測データから、観測物体の3次元形状を表す3次元点群を生成する3次元点群生成処理部11と、3次元環境を表現するデータ構造であって、当該3次元環境が格子領域に区切られて観測物体が存在する格子領域に直方体が配置された3次元環境マップを多段マップとして、生成された3次元点群データを用いて多段マップを時分割で生成し、当該生成した多段マップを記憶手段に規定時間分蓄積する時分割多段マップ生成/蓄積処理部12と、蓄積された規定時間分の多段マップと、新たに生成された多段マップと、を合成することで、新たな環境情報を反映させた全体多段マップを生成する全体多段マップ生成処理部13と、を備える。
(もっと読む)
画像処理プログラムおよび画像処理装置
【課題】カメラの取り付け位置や取り付け姿勢の情報を迅速かつ精度良く得ることを課題とする。
【解決手段】設定部232は、4個のマーカーが映し出された画像平面上の4個に対応するカメラ座標系における仮想的な4つの対応点の中から基準マーカーとする点Mを選択する。そして、設定部232は、基準点Mまでの距離L0に所定の値を設定する。作成部233は、基準点M以外の点、つまり基準マーカー以外のマーカーに対応する点1〜点3までの各距離L1,L2,L3を表す数式を作成する。導出部234は、設定部232により設定された基準マーカーで採用する全ての符号パターンを導出する。棄却部235は、導出部234により導出された符号パターンの中から、距離L1、L2、L3の値の少なくとも1つが相応しい値となり得えない符号パターンを棄却する。
(もっと読む)
画像処理装置及び外観検査方法
【課題】 距離画像を用いて外観検査を行う際に、メモリ資源の効率的な活用と検出精度の低下を防ぐ。
【解決手段】 3次元形状のワークを撮像するカメラ30からワーク表面までの距離に応じて各画素の濃淡値が変化する距離画像を生成し、生成された距離画像からその距離画像に含まれるワーク固有の形状情報を削減するために、生成された距離画像の一部又は全部の画素について、それぞれ形状情報に基づく濃淡値との差分を求め、形状情報が削減された距離画像を用いて画像処理を実行し、ワークの良否を判定し、判定結果を示す判定信号を出力する。
(もっと読む)
マスク画像作成システム
【課題】多関節型ロボットにより移動されるカメラの視点に応じて柔軟にマスク画像を作成するとともに、マスク画像を作成する手間を減らすことのできるマスク画像作成システムを提供する。
【解決手段】マスク画像作成システムは、複数の関節を有するアーム21を動作させる多関節型ロボット20と、アーム21に設けられてアーム21の動作により移動されるとともに、ワークWを撮像して実画像を取得するCCDカメラ28と、画像処理装置10とを備える。画像処理装置10は、アーム21の位置及び方向に基づいて、カメラ28の位置及び方向を算出し、ワークWの形状を表す3次元データ、ワークWの位置及び方向、並びにカメラ28の位置及び方向に基づいて、カメラ28によりワークWを撮像したと仮想した場合の仮想画像を取得する。そして、この仮想画像に基づいて、カメラ28により取得される実画像の一部をマスキングするマスク画像を作成する。
(もっと読む)
タイヤ外観検査方法及びタイヤ外観検査装置
【課題】タイヤの外観検査において、マスター画像を用意することなくパターンマッチングによりタイヤの外観を検査する外観検査方法及び外観検査装置を提供する。
【解決手段】タイヤ表面を撮像した撮像画像の中から複数のモデル画像を設定するモデル画像設定ステップと、複数のモデル画像と撮像画像とを繰り返しパターンマッチングし、所定のマッチング率以上の撮像画像の領域をマッチング画像として抽出するマッチング画像抽出ステップと、モデル画像とマッチング画像との差分を演算し、差分画像を作成する差分画像作成ステップと、差分画像を閾値と比較して欠陥画像を抽出する欠陥画像抽出ステップとを含むようにした。
(もっと読む)
位置姿勢計測装置
【課題】 対象物体と非対象物体の像を含む距離画像データを入力として対象物体の位置姿勢を推定する処理の高速化、及びメモリ消費量の軽減を目的とする。
【解決手段】 物体を撮影した距離画像上で物体に相当する物体領域に基づいて、該物体の位置姿勢を計測する。そのために、距離画像の領域を分割した部分領域群のうち少なくとも1つの部分領域を物体領域として設定する。物体領域に物体の形状モデルを当て嵌めて、物体の位置姿勢を推定する。当て嵌めの誤差に基づいて、物体領域を更新する。
(もっと読む)
顔向き検知装置
【課題】サングラスを着用したひとの顔の中心位置の検出精度を向上させる。
【解決手段】顔向き検知装置10は、ひとの顔を撮像する乗員カメラ12から出力された顔画像から、撮像用光源14から照射された光の反射点を抽出する反射点抽出部21と、反射点の面積が最大となる1対の反射点を選択する反射点選択部22と、1対の反射点間の中心座標を算出する中心座標算出部23と、サングラス着用判定部27から出力された判定結果においてひとがサングラスを着用していると判定された場合に、中心座標算出部23から出力された中心座標に基づき、ひとの顔中心位置を検出する位置検出部28と、ひとの顔中心位置に基づき、ひとの顔向き方向を検知する顔向き検知部29とを備える。
(もっと読む)
ステレオ映像内の視差探索範囲を求めるための方法及びシステム
【課題】シーンのステレオ画像のセットに基づいて該シーンの現在のステレオ画像のための視差探索範囲を求めるためのシステム及び方法を提供する。
【解決手段】ステレオ画像のセットからステレオ画像のサブセットを選択するステップであって、該サブセットは現在のステレオ画像及び少なくとも1つの隣接するステレオ画像を含み、該隣接するステレオ画像は現在のステレオ画像に時間的に隣接する、選択するステップと、ステレオ画像のサブセット内のステレオ画像毎に視差ヒストグラムを求めるステップであって、1組の視差ヒストグラムを形成する、求めるステップと、1組の視差ヒストグラム内の視差ヒストグラムの重み付けされた和として重み付け視差ヒストグラムを求めるステップと、重み付け視差ヒストグラムから視差探索範囲を求めるステップとを含む。
(もっと読む)
欠陥検査装置、及び欠陥情報管理方法
【課題】被検査基板における欠陥発生状況の把握を妨げることなく、管理すべき欠陥データ量を抑制できる欠陥検査装置の提供。
【解決手段】欠陥検査装置は、撮像装置が生成した被検査基板面の被検査画像データを取得する手段と、被検査画像データと基準画像データとを比較して欠陥部を検出する手段と、検出された欠陥部の位置座標を少なくとも含む欠陥データを生成する手段と、区画基準領域データ及び前記位置座標に基づいてそれの各領域に存在する欠陥部の個数を算出する手段と、各領域の欠陥部の個数と各領域の許容値とを比較して欠陥部密集領域を検出する手段と、欠陥部密集領域における各欠陥部の欠陥データを、その領域に対して予め定められた領域位置データに置換する手段と、領域位置データと置換されなかった欠陥部の欠陥データとを管理サーバへ送信する手段とを備える。
(もっと読む)
形状測定装置
【課題】被検物の三次元形状を測定する際に必要なメモリの容量を効率的に削減する。
【解決手段】形状測定装置において、ステップS5において、スポット光の照射位置が変化したと判定され、ステップS6において、過去にデータセットを記録した照射位置でないと判定された場合、測定データ、中間データおよび測定用画像データを含むデータセットを記録する。また、スポット光の照射位置が変化したか否かに関わらず、ステップS7において、現在のスポット光の照射位置でまだN回データセットを記録していないと判定された場合、データセットを記録し、すでにN回データセットを記録していると判定された場合、データセットを記録しない。本発明は、例えば、三次元形状測定装置に適用できる。
(もっと読む)
特異部分分布特徴検出装置及び特異部分分布特徴検出方法
【課題】製品表面の特異部分の分布の特徴を効率的に検出すること。
【解決手段】特異部分分布特徴検出装置100は、画像取得部2が取得した表面画像から処理対象画像を生成する処理対象画像生成部10と、処理対象画像上の直交XY座標系の特異画素の座標を取得する特異画素座標取得部11と、特異画素の座標の二つを用いて補助線を導き出す補助線導出部12と、所定の矩形枠と補助線との間の二つの交点のそれぞれに至るまでの、原点から矩形枠を辿る経路長さを座標軸とする直交パラメータ座標系を用いて、経路長さの組み合わせを直交パラメータ座標系の座標へ変換し、その変換回数を座標毎に計数する座標系変換部13と、計数結果の解析に基づき特異画素が形成する直線状の特徴を検出する直線状特徴検出部14とを備え、直線状特徴検出部14は、検出対象の直線の特性に応じて計数結果の解析対象となる座標範囲を限定する。
(もっと読む)
物体検知システム、物体検知システムの制御方法、制御プログラム、および記録媒体
【課題】物体およびその通過方向を正確に検知するとともに、容易に設置できる物体検知システムを実現する。
【解決手段】本発明の物体検知システム1は、所定の角度幅で通路を横断する方向に走査するレーザを出射する、通路に沿って所定の間隔で配置された2つのスキャン式レーザセンサ51を含む、通路を挟んで配置された2つのセンサユニット15と、2つのセンサユニット15の一方に含まれる2つのスキャン式レーザセンサ51の出力から検知した物体の個数および検知時刻と、他方に含まれる2つのスキャン式レーザセンサ51の出力から検知した物体の個数および検知時刻とを取得するデータ取得部11と、センサユニット15aで検知した物体の個数と通過方向を決定し、センサユニット15bで検知した物体の個数と通過方向を決定し、検知した物体の個数と通過方向を確定する検知部12と、を備えている。
(もっと読む)
情報処理装置、および情報処理方法、並びにプログラム
【課題】計算量を削減し効率的な3次元位置情報の生成を行う構成を実現する。
【解決手段】カメラによる撮影画像を観測データとして入力し、特徴点位置情報を含む多次元正規分布データからなる状態データを更新することで特徴点の3次元位置を求める例えばSLAM処理において、3次元情報の生成対象領域を区分したサブマップを設定する。さらにサブマップに属しない特徴点に関するデータを含まないサブマップ対応の状態データを生成して、観測データに基づいてサブマップ対応状態データを更新する。本構成によれば状態データのデータ量が削減され、状態データ更新に伴う計算量を減少させることが可能であり、効率的な処理が実現される。
(もっと読む)
画像検査装置、画像検査方法およびプログラム
【課題】少ない数の入力画像により高精度に画像検査を行うことができ、かつデータ処理の負担を低減することのできる画像検査装置を提供する。
【解決手段】基準空間の算出に利用する基準画像を複数の分割基準画像に分割する第1分割部104と、分割基準画像それぞれのマハラノビス距離に基づいて、画像検査の対象となる被検査画像の良否判定に利用する閾値を決定する閾値決定部110と、被検査画像を、複数の分割被検査画像に分割する第2分割部124と、分割被検査画像それぞれのマハラノビス距離に基づいて、代表値を決定する代表値決定部128と、代表値が閾値よりも大きい場合に、被検査画像に異常があると判定する良否判定部130とを備えた。
(もっと読む)
形状検査装置,形状検査方法
【課題】ディスク部材について,表裏各面と端面を形成するチャンファ部との境界部分において突起した形状欠陥を検出することができること。
【解決手段】1つの平面内の複数の位置各々に配置された複数のLED12からディスク基板1の測定部位Pに対し,順次異なる照射角度で光を照射し,その照射ごとに,計算機30により,測定部位Pからの反射光の像のカメラ20R,20Lで撮像し,さらに,計算機30により,各LED12に対応した撮像画像と光の照射角度φとに基づいて,測定部位Pの表面角度の分布を算出し,表面角度の変化が許容範囲内か否かの判別により表面形状の良否を判別し,表面形状の画像を,形状不良部分を明示しつつ画像表示装置に表示させる。
(もっと読む)
1 - 20 / 64
[ Back to top ]