
Fターム[2F065DD10]の内容
光学的手段による測長装置 (194,290) | 目的 (6,263) | コントラストの増大又は制御 (217) | フォーカシング (56)
Fターム[2F065DD10]に分類される特許
1 - 20 / 56
半導体基板の欠陥検査装置および半導体装置の製造方法
【課題】半導体基板の欠陥検査において、高精度かつ効率的に、可視光透過性を有する半導体基板の表裏面への焦点位置合せを行うこと。
【解決手段】
半導体基板の欠陥検査装置は、焦点位置合わせマークが表面に形成された可動ステージと、可視光を可動ステージに向けて照射する光源と、可動ステージに対向して設けられた対物レンズと、対物レンズが結像した画像を電気信号に変換する光電変換素子と、焦点位置合わせマークの可動ステージ上の位置および被検査物となる半導体基板の厚さが登録され、可動ステージと対物レンズの位置関係を制御する制御装置を備えている。制御装置は、登録された焦点位置合わせマークを基準にして半導体基板の裏面側の焦点位置合わせを行い、登録された半導体基板の厚さを基準にして半導体基板の表面側の焦点位置合わせを行う。
(もっと読む)
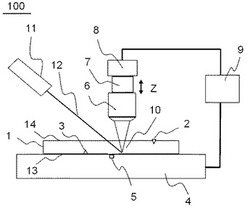
光学式検査装置及びエッジ検査装置

【課題】ウェハエッジ部の幅広い位置変化にも追従することができる光学式検査装置及びエッジ検査装置を提供する。
【解決手段】ウェハ100の表面の欠陥を検査する表面検査装置300と、この表面検査装置300に対するウェハ100の搬送路に設けたウェハステージ210と、このウェハステージ210上のウェハ100のエッジ部を検査するエッジ検査部530と、このエッジ検査部530を当該エッジ検査部530の光軸に沿って移動させる移動装置650とを備えたことを特徴とする。
(もっと読む)
画像取得装置および画像取得方法
【課題】受光部のフォーカス調整を容易に行う。
【解決手段】画像取得装置は、ガラス基板9上における線状の撮像領域を撮像する撮像ユニット2と、ガラス基板9を撮像領域と交差する方向に移動する移動機構とを備える。撮像ユニット2は、光照射部21および受光部23を有し、光照射部21により撮像領域に光が照射され、撮像領域からの光が受光部23のラインセンサへと導かれる。画像取得装置では、受光部回動機構が受光部23を回転することにより受光部23の光軸J2とガラス基板9の法線Nとのなす検出角θ2が変更される。撮像ユニット2は、光軸J2に沿って受光部23を移動する受光部移動機構をさらに備え、検出角θ2の変位量に基づいて受光部移動機構を制御することにより、光軸J2上においてラインセンサの受光面と共役な位置Pがガラス基板9の表面に配置される。これにより、受光部23のフォーカス調整が容易に行われる。
(もっと読む)
位置検出装置、位置検出方法、露光装置、露光方法およびデバイス製造方法
【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層UVRに接触した状態で、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを、1つの認識手段により、両アライメントマークALが重なる方向から同時に撮像して得られた1つの画像から両アライメントマークALの位置を別々に認識処理することで原板Mと基板Sとのアライメントを行う。そのため、撮像された原板Mおよび基板Sのアライメントマーク画像に相対的な位置誤差が生じるおそれがなく、振動や異なる走査タイミングに起因する位置誤差が生じることを防止できる。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層に接触した状態で、原板Mおよび基板のそれぞれに形成されたアライメントマークを、1つの認識手段3により、両アライメントマークが重なる方向から、一方のアライメントマークを撮像した後、他方のアライメントマークを撮像し、得られた両アライメントマークの画像にそれぞれ位置誤差補正処理を行う。そのため、補正後の両アライメントマーク画像を用いて高精度なアライメントを行うことが可能になる。
(もっと読む)
3次元シーンの要素の奥行きを評価する装置
【課題】3次元シーンに分布した被写体要素(object element)の奥行きを評価するための有利な装置を提案すること。
【解決手段】装置は、光学系であって、それ自体が、複数の画素21、22、23を有する光センサ2、および光センサの画素の1つの上にシーンの要素E1、E2、E3を結像できるレンズ1を備える光学系と、この要素からきてビットマップ方式の光センサの画素のうちの1つによって取り込まれた光のストリームの最大値に着目することによって焦点を調整できるシーンの要素のいずれか1つに光学系の焦点を調整する手段と、この焦点の調節からこの要素の奥行きを推定するのに適した手段とを備える。
(もっと読む)
マーク検出方法及び装置、位置制御方法及び装置、露光方法及び装置、並びにデバイス製造方法
【課題】物体上の複数のマークを効率的に、かつ高精度に検出する。
【解決手段】少なくとも1軸方向に関する検出領域が互いに異なる複数のアライメント系で、少なくともその1軸方向に関して互いに異なる位置に配置されたウエハ上のマークを検出するマーク検出方法であって、複数のアライメント系の検出領域にそれぞれウエハ上のマークを移動するステップ315と、ウエハをZ方向にスキャンして複数のアライメント系の検出信号及びデフォーカス量に対応するフォーカス信号を取り込むステップ316と、複数のアライメント系の検出信号とフォーカス信号とからフォーカス信号のオフセットを求めるステップ317とを有する。
(もっと読む)
シート材の欠陥検査方法、及びそれに用いる検査用治具
【課題】表面に微細な凹凸形状等の地合パターンを有するシート材の欠陥を、迅速かつ再現性良く検査する方法を提供する。
【解決手段】焦点調整用シート材を欠陥検査位置に載置し、カメラの焦点を合わせる第1のフォーカス工程、前記焦点調整用シート材から当該カメラの焦点をずらすように調整する第1のデフォーカス工程、第1のフォーカス工程における焦点位置Aから第1のデフォーカス工程における焦点位置Bまでの距離dを計測及び記録する工程、被検査シート材を第1のフォーカス工程と同一又は異なる欠陥検査位置に載置し、その地合パターンにカメラの焦点を合わせる第2のフォーカス工程、及び当該カメラの焦点を、第2のフォーカス工程における焦点位置A’から、前記距離d分ずらした焦点位置B’に合わせる第2のデフォーカス工程、及び焦点位置B’に焦点を合わせたカメラで被検査シート材の欠陥を検査する工程、を含むことを特徴とする欠陥検査方法。
(もっと読む)
移動情報測定装置
【課題】移動体の曲面からの信号に関してデフォーカスによる信号振幅減少を低減し、移動情報の検出精度の低下を抑制する。
【解決手段】光源と、移動方向に曲面を備える移動体と、前記曲面からの集光された反射光または透過光を受講する受光素子と、を有する移動情報測定装置において、前記曲面が移動方向に複数種の曲率を備える。
(もっと読む)
画像測定装置
【課題】高精度なオートフォーカス処理が可能な画像測定装置を安価に提供する。
【解決手段】画像測定装置は、ワークを撮像するローリングシャッター式の撮像装置と、撮像装置の合焦位置を制御して合焦位置を合焦軸方向の位置情報として出力する位置制御システムと、撮像装置から取得した画像情報から画像情報のコントラスト情報を算出する演算処理装置とを備え、演算処理装置は、取得した画像を複数の領域に分割し、各領域の、画像内における位置とコントラスト情報とに基づいて画像情報のコントラスト情報を補正する。
(もっと読む)
3次元寸法測定装置
【課題】本発明の目的は、画像を用いた測定において、1枚の画像に納まりきらない程の高い倍率で画像を取得する際にも、容易な操作で画像を取得でき、かつ、寸法を算出する際に、1枚の画像に納まりきらない程の高い倍率で撮影した画像を用いることで、1枚の画像に納まりきる画像から寸法を算出するよりも高い精度で寸法を算出可能な装置を提供することにある。
【解決手段】本発明は、ワイドカメラの画像からワークの輪郭を抽出し、抽出された輪郭情報に基づき、駆動機構の走査軌跡および、複数のカメラの撮像倍率を決定し、決定された走査軌跡を走査中に、複数のカメラから複数枚の画像を取得し、複数枚の画像を合成して、高倍率の画像を生成し、生成された高倍率画像から高精度に輪郭の寸法を求めることを特徴とする。
(もっと読む)
マスク欠陥検査装置およびマスク欠陥検査方法
【目的】マスク面上のパターン領域と非パターン領域の間に段差があるマスクであっても、効率的に検査可能なマスク欠陥検査装置およびこれを用いたマスク欠陥検査方法を提供する。
【構成】マスク面に対するフォーカス合わせを行うフォーカス合わせ機構と、パターン画像の取り込み時の検査視野走査方向上の検査視野を挟む第1箇所と第2箇所のマスク面におけるフォーカスを、それぞれ検出する第1のフォーカス検出部および第2のフォーカス検出部と、第1および第2の箇所が、パターン領域と非パターン領域とのいずれに位置するかを判定する判定部と、判定部の判定結果に基づき、フォーカス合わせ機構に対しフォーカス合わせ方法を指示するフォーカス合わせ方法指示部と、を有することを特徴とするマスク欠陥検査装置およびこれを用いたマスク欠陥検査方法。
(もっと読む)
形状測定装置および形状測定方法
【課題】凹凸形状の測定精度の向上を図ることができる形状測定装置を提供する。
【解決手段】本発明の形状測定装置は、測定対象1の凹凸形状にライン光を照射する投光装置2と、前記投光装置2によって前記凹凸形状に形成される光切断線を撮像する撮像装置3と、前記凹凸形状の上底及び下底の各々で前記光切断線の幅が最小になるように前記投光装置2をその光出射軸方向4に移動させる駆動装置5と、前記撮像装置3によって撮像された、前記凹凸形状の上底で前記光切断線の幅が最小となる画像と、前記凹凸形状の下底で前記光切断線の幅が最小となる画像に基いて、前記凹凸形状の高さ又は深さを算出する処理装置6と、を備える。
(もっと読む)
パターン光投影装置
【課題】パターン投影法による人の頭部等の3次元計測に用いられるパターン光を、簡易な装置で明るく、高精細に投影する。
【解決手段】フラッシュを光源とする事で簡易な構造とし、投影する直線状のパターンと平行な方向には広く、垂直な方向には狭いスリット状の絞りを設ける事により、投影された像のパターンと垂直な方向のぼけ幅を小さくし、高精細なパターン光を得る。また、ライトパイプを用いる事により明るいパターン光を得、高精度な3次元計測を行う。
(もっと読む)
正確な寸法検査用の自動焦点ビデオツールおよび方法
【課題】寸法検査用の自動焦点ビデオツールおよび方法を提供する。
【解決手段】最良自動焦点Z高さの精度を確実に提供するために、反復する自動焦点動作間に最適化照明を提供する。この方法には、初期光制御パラメータを用いて取得された初期自動焦点画像からの初期焦点曲線データに基づいた、量的な初期焦点Z高さ決定が含まれる。カメラが、よく合焦された画像が提供されるように、その初期焦点Z高さで設定される。最適化された光制御パラメータが、Z高さにおいてそれぞれの光制御パラメータを用いて取得された少なくとも1つのそれぞれの画像に基づいて決定され、改良された光制御パラメータを用いて取得された画像が、Z高さにおけるコントラスト関連用のほぼ最適な値を提供するようにする。改良された自動焦点画像が、改良された光制御パラメータを用いて取得され、改良された正確なZ高さが、結果としての焦点曲線に基づいて量的に決定される。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】被検体を撮影する際に自動的に焦点を合せ、得られた画像から欠陥の有無を判断する欠陥検査方法及び欠陥検査装置を提供する。
【解決手段】撮影して得られた画像から欠陥の有無を判断する欠陥検査方法において、撮像手段2の焦点を合せる自動焦点調節ステップと、被検体における欠陥の有無を判断する画像解析ステップとを具備し、自動焦点調節ステップは、被検体と撮像手段2との距離又は撮像手段2の焦点距離を複数回変更して撮影し、得られた各画像から被検体の輪郭を抽出処理し、各輪郭抽出画像に対して離散フーリエ変換処理を用いることで周波数領域に変換し、周波数領域における輝度値の総和を算出し、輝度値の総和が最大となる被検体と撮像手段2との距離又は撮像手段2の焦点距離を特定し、特定された被検体と撮像手段2との距離又は撮像手段2の焦点距離に調節する、とした。
(もっと読む)
ロボットシステムおよびロボットシステムの制御方法
【課題】ワークが撮像されたボケ画像からワークの位置を精度良く検出するロボットシステムを提供する。
【解決手段】ワークWに対して作業を実施するロボット10と、前記ワークWを載置するとともに、蛍光体マーカー74を備えたステージ72と、前記ワークWと前記蛍光体マーカー74とを所定の露光時間で撮像するカメラ20と、前記カメラ20の露光時間より短い周期で前記蛍光体マーカー74を点滅発光させるマーカー制御部45と、を備え、前記カメラ20により撮像されたボケ画像から前記蛍光体マーカー74の軌跡画像100を抽出して、前記軌跡画像100から点拡散関数を算出する点拡散関数算出部35と、算出した前記点拡散関数を用いて、前記ボケ画像を画像変換し前記ボケ画像からボケていない元画像を生成する画像生成部37と、前記元画像から前記ワークWの位置を算出する位置算出部39と、を有するロボットシステム5。
(もっと読む)
リソグラフィのための検査方法
【課題】リソグラフィのための検査方法を提供すること。
【解決手段】基板上でリソグラフィプロセスに使用されるリソグラフィ装置の焦点を決定するために使用される方法である。リソグラフィプロセスは、少なくとも2つの周期構造を基板上に形成するために使用される。各構造は、基板上のリソグラフィ装置の焦点の異なる関数として変化する互いに反対側の側壁角度間に非対称性を有する少なくとも1つのフィーチャを有している。放射のビームを少なくとも2つの周期構造上に導くことによって生成されるスペクトルが測定され、かつ、非対称性の比率が決定される。比率と、構造毎の焦点と側壁非対称性の間の関係とを使用して、基板上のリソグラフィ装置の焦点が決定される。
(もっと読む)
変位センサ
【課題】共焦点変位計による合焦点の周辺においてもピントが合った画像を撮像する。
【解決手段】計測装置において、共焦点変位計システムOPT−Aは、レーザダイオード1と、コリメートレンズ4と、対物レンズ6と、ハーフミラー3と、絞り板31と、フォトダイオード2とを含む。観察画像撮像系OPT−Bは、テレセントリック受光光学系であり、白色光源94と、対物レンズ6と、ダイクロイックミラー5と、絞り板81と、結像レンズ82と、イメージセンサ9とを含む。コリメートレンズ4は、振動子7により、両矢印方向に掃引される。絞り板81の絞り孔の径は、対物レンズ6の被写界深度がコリメートレンズ4の掃引の振幅以上となるように設定される。
(もっと読む)
1 - 20 / 56
[ Back to top ]