
Fターム[2F065EE00]の内容
光学的手段による測長装置 (194,290) | 補償;補正 (1,944)
Fターム[2F065EE00]の下位に属するFターム
Fターム[2F065EE00]に分類される特許
1 - 20 / 978
傾斜測定装置およびその方法
ステレオ3次元計測装置
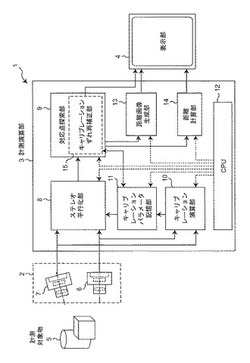
【課題】回路規模および演算時間の増大を招くことなくキャリブレーションずれを再補正する。
【解決手段】キャリブレーションによって補正された左右のカメラステレオ平行化後画像間のずれ量を、キャリブレーションずれ再補正部15を含む対応点探索部9による対応点の探索処理中において、キャリブレーションずれ再補正部15によるキャリブレーションずれ再補正処理で得られるデータを用いて再補正する。こうして、距離計測装置1における内部ハードウェアの回路規模および演算時間を増大させることなく計測精度を高めることができる。また、上記右カメラステレオ平行化後画像を上下にずらして、左右のカメラステレオ平行化後画像の上下方向のずれを再補正する。こうして、問題になり易い上下方向のキャリブレーションずれを低減することができる。その際に、対応点の探索を行う際の右カメラステレオ平行化後画像の最適位置を確実に見出すことができる。
(もっと読む)
部品実装装置および部品実装方法

【課題】物体の形状認識を正確に、かつ、高速に行うことのできる部品実装装置を提供する。
【解決手段】撮像部10と、輝度変化光を斜めから照射する照射部20と、対象物および基準点42を撮像部および照射部に対し第二方向に相対的に移動させて、対象物および基準点を撮像対象領域に対して通過させる移動部40と、基準点データと対象物データとを取得するデータ取得部と、それぞれの撮像のタイミングT1〜T4での基準点位置と基準点基位置との位置ずれを導出する位置ずれ導出部と、それぞれの撮像のタイミングの対象物基位置に対して、導出された位置ずれを加算して得られた対象物の測定部位の位置に対応する輝度値を取得する輝度値取得部と、取得された輝度値に基づいて、位相シフト法による波形を作成する波形作成部とを備える。
(もっと読む)
レーザ照射位置の補正方法、及び、レーザ加工装置
【課題】レーザ加工装置の出荷後再立ち上げにおけるレーザ照射位置の精度の悪化に対して、簡単な測定で精度悪化の傾向を定量把握して最終的に精度の高い補正を行うことが可能とするレーザ照射位置の補正方法が求められていた。
【解決手段】複数の加工エリアに分けて加工を行うレーザ加工装置において、加工エリアごとに対角線上に等間隔に並ぶ試験加工点を複数ヶ所設定し、予め設定された第一の補正データに基づく補正を施して試験加工点を加工するステップと、試験加工点の実際に加工された位置を測定するステップと、加工しようとする位置と実際に加工された位置の平面上のズレ量を直交する二軸で算出するステップと、加工エリアごとに、ズレ量のシフト成分と傾き成分を二軸ごとに算出するステップと、シフト成分と傾き成分をキャンセルするように算出された各加工エリアごとの補正情報を第一の補正データに加味し第二の補正データとする。
(もっと読む)
作業位置誘導装置及びその誘導方法
【課題】作業者が作業対象物から目を逸らすことなく、誘導画像を参照しながら作業対象位置を選別できるようにする。
【解決手段】作業時に、ポインティング部11の先端が、作業面の予め既知の作業対象位置に向かうように誘導する場合に、カメラ部13により作業面を撮影し、画面が透過する透明スクリーン部15により、作業時に作業面を見えるようにしながら、誘導用の位置ナビゲーションマーク153及び直交する交差点が誘導中心のライン151,152を表示し、カメラ部13で撮影された画像からポインティング部11の先端の位置を算出し、既知の作業対象位置の位置情報と比較し、両者のずれ量及び方向に基づいて透明スクリーン部15に誘導中心に対する位置ナビゲーションマークを表示し、位置ナビゲーションマークが誘導中心に向かうように移動方向を画面上に指示表示する。
(もっと読む)
情報処理装置、情報処理方法
【課題】撮像装置や現実物体に装着された姿勢センサの校正を、簡便かつ正確に行う為の技術を提供する。
【解決手段】姿勢計測値取得部145は、撮像装置120に装着された姿勢センサ110による姿勢計測値、現実物体125に装着されたセンサ115による姿勢計測値を取得する。画像処理部135は、現実物体125上に配置された指標の撮像画像上における画像座標を取得する。校正部160は、撮像装置120に対するセンサ110の配置情報、現実物体125に対するセンサ115の配置情報、のうち少なくとも1つを、上記2つの姿勢計測値、画像座標を用いて求める。
(もっと読む)
試験体の測定または分析のためのシステムおよび方法
【課題】空気によって少なくとも部分的に吸収される光を使用するよう設計され、かつ、より能率的なパージングシステムを有する、光学ツールのための方法を開発する。
【解決手段】試験体の測定のための方法において、該試験体の反射率測定データおよび分光偏光解析データを測定する工程と、該反射率測定データから、該試験体上に形成された窒化酸化物ゲート誘電体の厚さを判定する工程と、該厚さおよび該分光偏光解析データから、窒化酸化物ゲート誘電体の屈折率を判定する工程と、該屈折率から、該窒化酸化物ゲート誘電体の窒素濃度を判定する工程と、を含む。
(もっと読む)
形状測定装置の組み付け誤差補正方法、および補正用治具
【課題】補正用治具の交換なしに形状測定装置の組み付け誤差をX方向、Y方向、θ方向のすべてについて補正できるようにする。
【解決手段】ワーク支持部1と、これに支持されたワークの外周縁にレーザ光を照射し、そこからの反射光を受光して測定データを出力するレーザ変位計2と、ワーク支持部1をX方向に直線移動させるX方向移動部4と、ワーク支持部1をY方向に直線移動させるY方向移動部5と、ワークをθ方向に回転移動させるθ方向移動部6と、を備える形状測定装置の組み付け誤差を補正する場合に、X方向およびY方向の組み付け誤差を補正するための円弧状の外周縁と、θ方向の組み付け誤差を補正するための直線状の外周縁を有する補正用治具を用いる。
(もっと読む)
雲の含水率を決定する方法
【課題】雲の含水率を決定する方法を提供する。
【解決手段】雲の含水率は、雲の水滴サイズ分布から導出される。雲の水滴のサイズ分布を決定する方法は、雲の深さを電磁放射ビームによりサンプリングすることと、雲から戻った電磁放射のエコー強度を検出器により測定することと、測定エコー強度から測定光減衰係数を決定することと、測定エコー強度から測定後方散乱係数を決定することと、測定光減衰係数及び測定後方散乱係数からライダー比を決定することと、ライダー比から水滴の形状パラメータ(μ)及びメジアン体積径(DMVD)を含む値ペアを決定することと、値ペア(μ,DMVD)を使用して水滴のサイズ分布を決定することとを含む。
(もっと読む)
多波長干渉計、計測装置および計測方法
【課題】 被検面が傾いていても測定精度を悪化させることのない多波長干渉計を提供する。
【解決手段】 波長が互いに異なる少なくとも2つの光束を参照光と被検光とに分割し、分割された参照光の周波数と被検光の周波数とを異ならせ、被検光と参照光とを干渉させる干渉計において、干渉光を複数の光束に分割する分割部を有し、分割された複数の光束を各波長について検出する。
(もっと読む)
3次元計測システム及び3次元計測方法
【課題】外部標定の容易なステレオ撮影による3次元計測システム及び3次元計測方法を提供する。
【解決手段】3次元計測システムは、測定対象物1を複数方向から撮影してステレオ画像20を得るステレオ撮影部11と;測定対象物の全体をカバーする基準体2の一部を構成する、複数の基準マーク4を有するサブ基準体3と;ステレオ撮影部で撮影して得たステレオ画像に基づくサブ基準体が有する複数の基準マークの3次元座標値の撮影測定値fと予め基準計測された基準測定値gとを含む、基準体の3次元数値解析モデルである基準体モデル102を3次元計算空間V中に一体として画成する基準体情報画成部12と;基準体モデルを用いてステレオ撮影部の外部標定要素を算出する標定要素算出部13と;外部標定要素により定位されたステレオ撮影部により撮影される測定対象物のステレオ画像から測定対象物の3次元計測をおこなう3次元計測部14とを備える。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が一定範囲とされた支持基準体であるエンコーダ本体2aと、エンコーダ本体2aに対し全周回転自在に軸支された駆動する回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2a及び回転軸3から切り離されて、エンコーダ本体2aの回転角度を光学式角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
尖端バンプの高さ測定装置
【課題】 半導体チップの尖端バンプの高さを測定する。
【解決手段】 尖端バンプを含む複数の半導体チップが形成された半導体ウェハ21の上方に面照射装置33が配置されて、面照射装置33が半導体ウェハ21の上面に光を照射する。一対の撮像装置34,35が、半導体ウェハの斜め上方に配置されて、半導体ウェハ21上の尖端バンプを含む半導体チップを斜め上方から撮像する。コンピュータ36は、一対の撮像装置34,35によって撮像された一対の画像に基づいて尖端バンプの底から先端までの長さをそれぞれ検出して、前記検出した一対の長さと、一対の撮像装置34,35の光軸が半導体ウェハ21の上面となす角度を用いて尖端バンプの高さを計算する。
(もっと読む)
位置検出装置、描画装置、および、位置検出方法
【課題】基板の面内領域から取得できる情報を用いて、基板の位置を迅速かつ確実に検出できる技術を提供する。
【解決手段】位置検出装置は、基板9を載置するステージ11と、ステージ11に載置された基板9の面内領域を撮像する撮像部と、撮像部が取得した撮像データに基づいて基板9の位置を特定する位置特定部と、を備える。位置特定部は、撮像データを解析して、基板の表面に形成されたスクライブラインのうち最外周に配置されている最外周スクライブライン910を検出し、最外周スクライブライン910の検出位置に基づいて、レイアウト領域93の中央に配置されている中央チップ領域920の位置を特定する。そして、中央チップ領域920の位置に基づいて、基板中心90の位置を特定する。
(もっと読む)
画像処理装置、画像処理方法、プログラム、および画像処理システム
【課題】画像解析の処理負荷および精度を改善するための画像処理装置、画像処理方法、プログラム、および画像処理システムを提供する。
【解決手段】距離画像センサにより取得される対象空間における各位置の距離が表現された距離画像の解析結果に基づき、前記対象空間を撮像する撮像装置により取得される撮像画像から注目領域を決定する注目領域決定部と、前記注目領域決定部により決定された前記注目領域を画像解析する画像解析部と、を備える画像処理装置。
(もっと読む)
光学計測装置
【課題】本発明は、ヘッド部を大型化することなく、コントローラ部に対してヘッド部を交換することが可能なように互換性を持たせることができる光学計測装置を提供する。
【解決手段】本発明に従った光学計測装置では、計測対象物200に対して光を用いて計測を行ない、ヘッド部10と、コントローラ部20と、光ファイバ11と、記憶部40とを備えている。本発明に従った光学計測装置では、ヘッド部10とコントローラ部20とを光ファイバ11で接続する。記憶部40は、製造されるヘッド部10のそれぞれの個体に対して関係付けられ、コントローラ部20で行なう演算に必要な情報をヘッド部10の個体情報として記憶する。コントローラ部20は、コントローラ部20に対して物理的に独立して存在する記憶部40から個体情報を読出し、読出した個体情報を用いて演算を行なう。
(もっと読む)
複数波長による表面形状測定方法およびこれを用いた装置
【課題】 光干渉法を用いて、1波長の単色光を測定対象面に照射し、測定対象面までの距離を変更して、少なくとも3枚以上の画像を撮像して、各画素の輝度値から位相計算をおこない、隣接画素の位相値を用いて三次元形状を測定する位相シフト法が用いられて来たが、隣接画素間の段差に波長による制約があった。
【解決手段】広帯域な波長特性を有する照射光から波長の異なる複数の単色光を抽出し、それらを混在させて、分岐手段を介して測定対象面と参照面に同時に照射し、測定対象面と参照面とから反射して同一光路を戻る反射光によって生じる干渉縞の画像を測定対象面と参照面とからの反射光路長の差を変化させて、取得した前記複数枚の画像を単色光ごとに分解し、単色光ごとに求めた各画素の位相から、複数個の表面高さの候補群を求め、各候補群から共通する高さを実高さとして求める。
(もっと読む)
現在位置算出装置および現在位置算出方法
【課題】本発明は、誤差の累積を抑制し、目標物になりそうなものがない単調な道路でも適切に真の現在位置を算出できる現在位置算出装置および現在位置算出方法の提供を目的とする。
【解決手段】本発明にかかる現在位置算出装置は、自車17の現在位置における2次元画像である観測画像が入力される観測画像入力部1と、所定の地点に関連して予め用意された2次元画像である参照画像を管理する、参照画像管理部9と、観測画像と、記憶されている現在位置である仮現在位置に対応する参照画像とを、画像マッチングにより照合する照合部としてのピクセルパターン照合部5と、ピクセルパターン照合部5における照合結果に基づいて、自車17の真の現在位置を算出する現在位置算出部6とを備える。
(もっと読む)
描画装置
【課題】シリコンなどのウエハー上にレーザー光を用いて露光することで描画を行う描画装置において、ナノミクロンオーダーの高精度な位置決めを行うこと。
【解決手段】レーザー光を一定方向に往復させて所定の間隔でドットパターンの描画を行う光学素子用の描画装置であって、レーザー光を照射する照明光学系と、
基盤を載置するXYステージと前記照明光学系と前記XYステージとの相対位置を測定する前記XYステージ上に設置されたナノスケールと、前記基盤上の描画信号の基準位置とその描画信号波形データ出力と、前記ナノスケールによって測定された往路のドットパターンの描画終了位置から、復路のドットパターンの描画開始位置を抽出する軸制御ユニットと、前記軸制御ユニットによって抽出された描画開始位置から描画を開始するように前記照明光学系の位置を補正する位置補正手段と、を備える。
(もっと読む)
計測装置および計測方法
【課題】高精度に被検面と参照面の間の絶対距離を計測可能な計測装置および計測方法を提供する。
【解決手段】第1の基準波長λ1と第2の基準波長λ2との間で波長走査が可能な光源11と、第3の基準波長λ3の光を射出する光源10を有する光波干渉計測装置は、各波長に対応した干渉光の信号に基づいて被検面と参照面との間の光路長に相当する位相の誤差を補正し、誤差が補正された位相に基づいて被検面と参照面の間の絶対距離を算出する処理部19を有する。
(もっと読む)
1 - 20 / 978
[ Back to top ]