
Fターム[2F065FF04]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 画像計測、写真計測 (6,129)
Fターム[2F065FF04]の下位に属するFターム
Fターム[2F065FF04]に分類される特許
141 - 160 / 4,968
位置検出装置、描画装置、および、位置検出方法
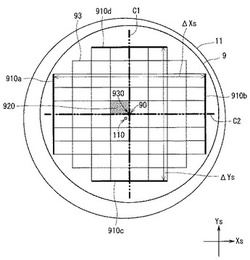
【課題】基板の面内領域から取得できる情報を用いて、基板の位置を迅速かつ確実に検出できる技術を提供する。
【解決手段】位置検出装置は、基板9を載置するステージ11と、ステージ11に載置された基板9の面内領域を撮像する撮像部と、撮像部が取得した撮像データに基づいて基板9の位置を特定する位置特定部と、を備える。位置特定部は、撮像データを解析して、基板の表面に形成されたスクライブラインのうち最外周に配置されている最外周スクライブライン910を検出し、最外周スクライブライン910の検出位置に基づいて、レイアウト領域93の中央に配置されている中央チップ領域920の位置を特定する。そして、中央チップ領域920の位置に基づいて、基板中心90の位置を特定する。
(もっと読む)
電子測定器

【課題】測定対象物の寸法を電子的に測定可能な電子測定器を提供する。
【解決手段】等ピッチで1列に並べられた受光素子アレイ20と、受光素子アレイ20に結像するレンズ系16と、測定対象物25へ光を照射する光源26と、測定対象物25から反射した光を受光素子アレイ20により受光して出力されるアナログ信号をディジタル処理する信号処理部28と、信号処理部28によって得られたディジタル計数値DSを表示する表示部12とを備え、ディジタル計数値DSにより、測定対象物25の大きさを表示することを特徴とする電子測定器10。
(もっと読む)
柄計測装置及び柄計測方法
【課題】ランダム柄を正確に計測しやすい柄計測装置を提供する。
【解決手段】凹凸型を用いてプレス成型された基材30の凹凸柄を計測する柄計測装置に関する。前記凹凸型の三次元の加工データを記憶する加工データ記憶手段11。前記加工データから選択された任意の特徴部sのデータを記憶する特徴部データ記憶手段12。前記基材に形成された前記凹凸柄を全面計測して得られる三次元データを記憶する凹凸柄データ記憶手段13。前記特徴部データと前記凹凸柄データとを比較することによって、前記特徴部により前記基材に形成される特徴柄が基材30の一端からどの位置に現れるかを検出すると共に、検出された前記特徴柄の位置を基準にして前記加工データと前記凹凸柄データとを比較することによって、前記加工データと前記凹凸柄データとのズレを算出する算出手段14とを備える。
(もっと読む)
段差部認識装置
【課題】ステレオカメラにより取得されるステレオ画像を利用して、階段等の段差部の踏面の先端側エッジの空間的な位置及び方向を含む該段差部を配置位置を精度良く認識することができる装置を提供する。
【解決手段】カメラ3R,3Lのうちの基準画像に、複数条の演算処理領域R3min(k2)を設定すると共に、複数条の演算処理領域R3min(k2)のそれぞれにおける実エッジ投影線L52rの複数の候補位置v(k1)を設定し、各演算処理領域毎に、各候補位置の実エッジ投影線(段差部の先端側エッジの投影線)の位置に対する適合度を表す評価関数の値を射影変換を利用して算出する。実エッジ投影線を推定してなる推定エッジ投影線を、複数条の演算処理領域R3min(k2)のそれぞれにおける推定エッジ投影線の位置の適合度を合成してなる合成適合度が最も高くなるように決定する。推定エッジ投影線と段差部の踏面の平面パラメータとに基づいて段差部の空間的な配置を認識する。
(もっと読む)
欠陥検査装置
【課題】製造ラインを連続して搬送される開口を塞ぐシール部を有する被検査物に対して、特殊領域特定のために準備工程を必要とせず、検査時間の大幅な短縮が可能な、効率の良い検査性能に優れた検査装置を提供する。
【解決手段】容器を搬送する手段と、第一の光学手段と、第一の光学手段の容器搬送方向の下流に設けられた第二光学手段と、第一の特殊領域特定手段と、第一の特殊領域に基づいてシール部の液漏れ欠陥を検出する第一の検査手段と、前記エッジ座標と、第一の撮像手段と第二の撮像手段の取り付け角度の角度差と、第一の撮像手段と第二の撮像手段から得られた撮像画像における検査領域の中心座標から、第二の撮像手段によって得られた画像の第二の特殊領域を特定する第二の特殊領域特定手段と、第二の撮像手段によって撮像した画像の第二の特殊領域に基づいて容器の異物欠陥を検出する第二の検査手段と、を備えたことを特徴とする欠陥検査装置。
(もっと読む)
基板検査装置及び検査方法
【課題】基板検査装置及び検査方法を提供すること。
【解決手段】検査方法は、測定対象物を撮影して測定対象物のピクセル別にイメージデータを取得し、測定対象物のピクセル別に高さデータを取得し、測定対象物のピクセル別にビジビリティデータを取得し、取得されたイメージデータと、ピクセル別の高さデータ、及びビジビリティデータのうちの少なくとも1つとを乗算して結果値を算出し、算出された結果値を利用してターミナル領域を設定すること、を含む。よって、より正確にターミナル領域を判別することができる。
(もっと読む)
パターン画像表示装置およびパターン画像表示方法
【課題】コントラストの高いパターン画像の表示を低コストにて実現する。
【解決手段】パターン画像表示装置の画像取得部13は、光照射部131、ラインセンサ132、角度変更機構、および、表示対象であるガラス基板9を移動する移動機構を備える。光照射部131からは、ガラス基板9の薄膜パターンに対して透過性を有する波長の光が出射される。光照射部131からの光の照射角θ1およびラインセンサ132により撮像が行われる検出角θ2は、常に同じであり、これらの角度は角度変更機構により変更される。パターン画像表示装置では、予め画像のコントラストが高くなる照射角および検出角の設定角度が求められ、照射角および検出角が設定角度とされる。これにより、単一波長の光源を用いてコントラストの高い画像をラインセンサ132により取得し、ディスプレイに表示することができ、パターン画像表示装置の製造コストも削減することができる。
(もっと読む)
観察装置および観察方法
【課題】透明性基板上に形成された不透明なデバイスパターンを観察像において明確に識別することができる観察方法、および観察装置を提供する。
【解決手段】デバイスパターン3が形成されている側に粘着シート4を貼り付けたうえで透明なステージ7に固定し、ステージ7の上方から同軸透過照明光L1と斜光透過照明光L2とを重畳的に照射するとともに、ステージ7の下方側からステージ7を介して裏面観察手段6で観察することで、観察像においては、デバイスパターン3に対応して、暗い(黒色の)デバイスパターン像が観察され、デバイスパターン像IP1以外の部分は明るく観察される。また、気泡5に対応する部分IB1についても十分に明るく観察される。これにより、観察像においてデバイスパターン3の形状を明確に特定することが可能となる。
(もっと読む)
金属板の外観評価方法
【課題】研磨部及び再研磨部の仕上がり具合を簡単な手法で定量的に評価できる金属板の外観評価方法を提供する。
【解決手段】この金属板の外観評価方法では、金属板1の表面のデジタル画像10をスキャナ4によって取得し、デジタル画像10の一部画像11に含まれる各ピクセルのRGB値をグレースケール変換して得られるAc値の波形パターンに基づいて研磨部2及び再研磨部3の外観の可否を判断する。波形パターンを用いることで、研磨部2及び再研磨部3の外観を容易かつ定量的に判断できる。また、この方法では、波形パターンに基づいて、研磨部2及び再研磨部3の研磨方向がスキャナ4の走査方向と一致しているデジタル画像10を判断対象として選別する。この前処理により、外観判断工程で用いる波形パターンのS/N比が向上し、判断精度が高められる。
(もっと読む)
撮像装置、位置計測装置及び撮像方法、位置計測方法、並びに構造物の製造方法
【課題】CCDやCMOSセンサなどの撮像素子を用いた薄型の撮像装置が多く用いられており、位置計測対象を複数の撮像装置で撮像して所定の画像処理を施すことにより、位置計測対象の位置を計測している。この時、視野を広くしても、分解能の低下を抑制できる撮像装置、位置計測装置及び撮像方法並びに位置計測方法を提供する。
【解決手段】視野V1〜V3の像を撮像する撮像素子2を備える。複数の視野の像を重ねて撮像素子に撮像可能とする像重ね部3を備える。前記像重ね部は、入射した光の少なくとも一部を前記撮像素子に入射させるビームスプリッターを有する。
(もっと読む)
回路基板の個体識別装置および個体識別方法
【課題】回路基板の個体識別を簡便かつ容易に実現する回路基板の個体識別装置および個体識別方法を提供すること。
【解決手段】回路基板100上の複数の計測対象110の位置を計測し、計測対象110の計測値と計測対象110の設計値との差を計測対象110ごとの位置情報として取得する位置情報取得手段10と、位置情報取得手段10によって取得された位置情報の組み合わせを基板識別符号として登録する登録手段20とを備える回路基板の個体識別装置。
(もっと読む)
複数波長による表面形状測定方法およびこれを用いた装置
【課題】 光干渉法を用いて、1波長の単色光を測定対象面に照射し、測定対象面までの距離を変更して、少なくとも3枚以上の画像を撮像して、各画素の輝度値から位相計算をおこない、隣接画素の位相値を用いて三次元形状を測定する位相シフト法が用いられて来たが、隣接画素間の段差に波長による制約があった。
【解決手段】広帯域な波長特性を有する照射光から波長の異なる複数の単色光を抽出し、それらを混在させて、分岐手段を介して測定対象面と参照面に同時に照射し、測定対象面と参照面とから反射して同一光路を戻る反射光によって生じる干渉縞の画像を測定対象面と参照面とからの反射光路長の差を変化させて、取得した前記複数枚の画像を単色光ごとに分解し、単色光ごとに求めた各画素の位相から、複数個の表面高さの候補群を求め、各候補群から共通する高さを実高さとして求める。
(もっと読む)
三次元分光的符号化撮像のための方法と装置
【課題】簡単な構成で、深度に関して解像度の良い、広い、三次元撮像方法の実現。
【解決手段】位相感知分光的符号化撮像を使用する、三次元表面測定値を得るための方法および装置が記述される。横方向および深度の両者についての情報は、単一モード光ファイバを介して送信され、本手法を小型プローブへの組み込むことが可能となる。
(もっと読む)
可動式ホーム柵監視用カメラ装置
【課題】都市部の駅ホームや、地下鉄の駅ホームでは、駅ホームのスペースが狭く、列車の乗降口または可動式ホーム柵の開閉部を広範囲にするための監視用カメラ装置のカメラ部の設置スペースを十分に確保できない。
【解決手段】本発明の可動式ホーム柵監視用カメラ装置は、可動式ホーム柵と、反射鏡と、前記可動式ホーム柵内に設置し前記反射鏡を介して前記可動式ホーム柵を撮像するカメラ部と、前記カメラ部が撮像した画像から乗客を検出する画像処理部と、モニタとを備え、前記画像処理部は、前記カメラ部が撮像した画像から前記可動式ホーム柵の開閉部およびその周辺を切り出して合成した合成画像を作成し、前記モニタは、前記合成画像を表示する。
(もっと読む)
マシンビジョン検査システムおよびその位置測定結果の決定方法
【課題】複数の視野に分割された対象を高精度に測定することができるマシンビジョン検査システムおよびその位置測定結果の決定方法を提供する。
【解決手段】マシンビジョン検査システムは、第1動作状態においてスケールベースの測定により第1対象FE1の位置を測定する。第2動作状態では、第1対象から第2対象に至る途中で重複画像CIA〜CICを撮影し、画像相関を利用して重複画像CIA〜CICの相互の画像変位を測定し、第1対象の位置と画像変位のセットとを合わせて第2対象FE2の位置を測定する。
(もっと読む)
箱体の品質検査装置
【課題】箱体の姿勢にかかわらず接合部の精度を正確に検査でき、箱体の形状精度や印刷品質、異物の有無も同時に検査することができ、検査スペースの効率化を図ることができる品質検査装置を提供する。
【解決手段】接合部を挟んで隣り合う2つの領域を撮像する撮像手段3と、照明手段4と、基準形状データ記憶部、及び基準画像データ記憶部を有する記憶手段50と、撮像される画像に基づき形状データを検出し、各領域の基準形状データと対比することにより各領域のずれ量を算出し、各領域の形状精度の良否を判定する形状精度判定手段と、形状精度判定手段により算出される各領域のずれ量に基づき、当該箱体の接合精度の良否を判定する手段と、撮像手段により撮像される画像に基づき各領域の画像データと基準画像データ記憶部に記憶された各領域の基準画像データとを対比することにより各領域の印刷品質の良否及び異物の有無を判定する手段とを備えた。
(もっと読む)
パターンの描画条件導出方法及びパターン描画装置
【課題】パターンのムラ欠陥の生じない描画条件を導出し、製品の歩留まりを向上する。
【解決手段】基板上に描画するパターンのムラ欠陥が発生しない描画条件を導出する方法であって、基板上に形成するパターンを生成するパターン情報生成工程S1と、パターンに対して、複数の描画項目の組み合わせによる、2通り以上の描画条件を設定する描画条件設定工程S2と、前記生成されたパターンを抜き取り、補助基板上に、前記各描画条件のもとに、矩形領域をなす補助パターンを形成する補助パターン描画工程S3と、補助基板に対して照明光を入射し、補助パターンから生じる回折光を光電変換素子にて画像として取得し、ムラ欠陥に関するムラ評価値とムラ発生周期とを求めことにより、複数の描画条件の中からムラ欠陥が生じない描画条件を導出する描画条件判定工程S4とを含むパターンの描画条件導出方法である。
(もっと読む)
足背高測定法及びその測定法を使用した足型測定器
【課題】足型測定器において、撮像手段により足の側方を撮影する場合、撮像手段と足の距離を正確に測定できないことから足背部の高さの正確な測定ができないという不都合を解決し、足背高の正確な測定を含む足型測定器を提供すること。
【解決手段】足型測定器の撮像手段で取得した足裏画像において、第2足指の先端と踵の最後端を結ぶ線上の各点と撮像手段の光学的中心との距離を測ることにより、撮像手段と足との間の距離を特定できる。撮像装置と種々の距離での既知高の物体の画素単位での測定値と物体の実寸法との関係から変換式を事前に求めておくことにより、足の側方画像から求めた画素単位での足背高を実寸法に変換することができる。この手法により、足背高の測定を含む足型測定器を提供する。
(もっと読む)
位置ずれマップ作成装置、パターン検査システム、及び位置ずれマップ作成方法
【課題】被検査試料に形成されたパターンの位置ずれマップを高精度に作成する装置を提供する。
【解決手段】位置ずれマップ作成装置200は、被検査試料から取得された光学画像と参照画像との間での位置ずれ量に基づいた位置ずれマップ(1)に対し、ワイドパスフィルタ処理をおこなって位置ずれマップBを作成するWPフィルタ処理部56と、ローパスフィルタ処理をおこなって位置ずれ量マップCを作成するLPフィルタ処理部58と、座標計測装置で計測された複数の位置計測用パターンの各パターンの位置の位置ずれ量に基づく位置ずれマップ(2)に対し、LPフィルタ処理をおこなって位置ずれマップCを作成するLPフィルタ処理部64と、位置ずれマップAと位置ずれマップBの差分に位置ずれマップCを加算することによって合成して位置ずれマップDを作成する合成部66と、を備える。
(もっと読む)
撮像装置、並びに、これを用いる画像解析装置及び移動装置
【課題】撮像領域内の各地点からの光に含まれる偏光成分間の大きさの違いを示す指標値に基づく画素値をもった偏光情報画像の高精度な解析処理を実現することを課題とする。
【解決手段】水平偏光成分P及び鉛直偏光成分Sの大きさの違いを示す差分偏光度(指標値)を算出し、算出した各指標値に基づく画素値をもった差分偏光度画像(偏光情報画像)を撮像するという撮像動作を連続して行うことで、露光量が互いに異なる例えば3種類の偏光情報画像を撮像する。そして、過去の撮像動作により撮像された3種類の偏光情報画像の中から、偏光成分間の大きさの違いが最大である特定の偏光情報画像を選定し、選定した特定の偏光情報画像に対応する露光量に基づいて後の撮像動作時の露光量を決定する。
(もっと読む)
141 - 160 / 4,968
[ Back to top ]