
Fターム[2F065FF28]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 測定点を捜すもの (476) | 自動追尾 (81)
Fターム[2F065FF28]に分類される特許
1 - 20 / 81
三次元座標測定装置、三次元座標測定方法、及びプログラム
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
横断歩道検出装置
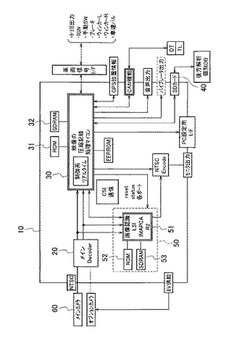
【課題】制御系の演算処理に対する負荷を軽減しつつ、車両と共に移動する車載のカメラによる撮影画像から精度良く横断歩道を検出すること。
【解決手段】車両に搭載したカメラ60からの撮影画像の画像認識領域の部分をマイコン30でエッジ処理し、エッジ処理した画像信号を画像認識LSI51で高速フーリエ逆変換して、強周期性を有するゼブラパターンを画像認識領域中から抽出する。抽出したゼブラパターンの周期性が横断歩道の周期性の範囲内であれば、そのゼブラパターンを横断歩道であるとマイコン30が認識する。
(もっと読む)
データ解析装置、データ解析方法、及びプログラム

【課題】地物表面の三次元形状を表す点群データに基づいて地物の壁面を自動的に検出する。
【解決手段】部分空間設定手段20は解析の対象空間を垂直面で分割して、柱状の複数の部分空間を設定する。部分空間選択手段22は部分空間のうち予め設定した閾値以上の高低差を有する点群を含むものを注目部分空間として選択する。ブロック空間設定手段24は注目部分空間を水平面で分割して、縦に積み重なる複数のブロック空間を設定する。水平面内探索手段26はブロック空間ごとに、水平面内の線分のうち、水平面に射影された点群が予め設定した基準以上に近傍に集まるものを探索して水平面内における壁面の位置と定める。
(もっと読む)
指示位置表示装置および指示位置表示システム
【課題】レーザー光の照射位置の制御や照射位置の制御にかかる装置レイアウトの自由度を向上する。
【解決手段】カメラ10と、レーザーポインタ20が照射するレーザー光の照射位置を含む範囲をカメラ40が撮像するようにレーザーポインタ20とカメラ40とを載置され、レーザーポインタ20とカメラ40とを一緒に回動させるポインタマニピュレータ30と、ポインタマニピュレータの回動を制御する制御装置50と、を備え、制御装置50は、カメラ40が撮像する画像P2とカメラ10が撮像する画像P1とを取得し、画像P2内における画像P1の位置を特徴点マッチングにより特定し、画像P1と画像P2と前記位置とに基づいて、ポインタマニピュレータ30の回動を制御する。
(もっと読む)
画像ベースの位置決定
【課題】プラットフォームの位置を識別するための方法および装置を提供する。
【解決手段】プラットフォームが動いている間、プラットフォームに関連するカメラシステムによって生成された一連の画像内の特徴が識別される。カメラシステムのパースペクティブの移動が、一連の画像内の特徴の位置の移動から識別される。プラットフォームの位置の変化が、パースペクティブの移動に基づいて識別される。
(もっと読む)
追尾装置及び追尾方法
【課題】顔部が非検出となったり、顔部の検出の精度が低下したりした場合であっても、以後のフレームにおける追尾精度を落とすことの無い追尾装置及び追尾方法を提供すること。
【解決手段】追尾対象の顔部を、顔検出回路1307を用いた追尾処理と、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。また、追尾対象の顔周辺部を、顔検出回路1307を用いた追尾処理によって検出された顔部の位置から推定して追尾するとともに、追尾処理回路1305による輝度情報を用いた追尾処理と、追尾処理回路1306による色情報を用いた追尾処理とによって追尾する。次フレームの追尾処理の開始の位置を顔検出回路1307における顔検出の結果と顔部信頼性向き判定回路1308における顔部の向きの判定結果に応じて変更する。
(もっと読む)
追尾式レーザ干渉計
【課題】移動体の移動量と、移動体の移動方向と直交する方向におけるずれ量との測定にかかる測定時間を短くすることができるとともに、測定にかかるコストを低減できる追尾式レーザ干渉計を提供する。
【解決手段】追尾式レーザ干渉計1は、レトロリフレクタRで反射される測定光L22を用いて移動体Mまでの距離を測定する測長部21と、レトロリフレクタRで反射された測定光L21を受光する検出器222を備える追尾用光学部22とを有する本体2と、検出器222からの受光信号に基づいて本体2の姿勢を制御し、本体2にレトロリフレクタRを追尾させる制御手段3とを備え、制御手段3は、本体2にレトロリフレクタRを追尾させることを停止させた状態で、レトロリフレクタRで反射された測定光L21の検出器222における受光位置Q2に基づいて、移動体Mの移動方向に対して直交する方向における移動体Mのずれ量を測定するずれ量測定部32を備える。
(もっと読む)
視線方向の推定装置、視線方向の推定方法およびコンピュータに当該視線方向の推定方法を実行させるためのプログラム
【課題】顔の向きの制限を緩和して、比較的少数のカメラにより、観測範囲内の任意の位置における被測定対象者の視線方向のリアルタイムに推定し追跡する視線方向の推定装置を提供する。
【解決手段】第2の頭部位置・姿勢推定部5612は、撮影できている複数のカメラからの画像データを統合して処理することにより、頭部の位置および頭部の姿勢の推定処理を実行する。処理対象となっている画像フレーム以前に獲得されている眼球の3次元モデルに基づいて、眼球中心推定部5614は、処理対象の特定人物の眼球中心の3次元的な位置を推定する。虹彩中心抽出部5616は、虹彩の中心の投影位置を検出する。視線方向推定部5618は、抽出された虹彩の中心の投影位置である画像フレーム中の2次元的な位置と、推定された眼球の3次元的な中心位置とに基づいて、視線方向を推定する。
(もっと読む)
微細非周期パターン投影装置および方法とそれを用いた三次元計測装置
【課題】ユニークな特徴をもつ非周期パターンを投影して、なめらかな表面をもつ物体の三次元形状を計測する。
【解決手段】2種の菱形で構成した非周期パターン模様をワークに投影しステレオカメラで計測する。
(もっと読む)
測定補助器具およびそれを用いた直径測定方法
【課題】 円形材料等の測定対象物に対し、レーザトラッカーから見て反対側の面の空間座標を測定すること、並びに外周面における任意の高さ位置の空間座標を測定することを可能にする測定補助器具を提供する。
【解決手段】 測定補助器具20は、ターゲットTgを設置するターゲット設置部材21と、その下側に位置固定で設けられ測定対象物Wの上端面に接触させる上端面接触部材22と、その下方に配置され測定対象物Wの周面に接触させる周面接触部材23と、上面接触部材22に対する周面接触部材の高さを調整する高さ調整機構24とを備える。レーザトラッカー1により、測定対象物Wに設けられたターゲットTgにレーザ光Lbを照射し、その反射光からターゲットTgの空間座標を求める。求められた空間座標から、測定対象物Wの外周面における周面接触部材23との接触箇所の空間座標を得る。
(もっと読む)
回転制御装置及び回転制御方法
【課題】 コンパクトな構成で作業台の回転制御の精度の向上を図ることができる回転制御装置及び回転制御方法を提供する。
【解決手段】 回転体の回転に連動して回転するロータリーエンコーダの読取信号を処理して回転ムラ信号と回転ブレ量信号とを生成し、回転駆動部において回転ムラ信号に応じて回転体の回転速度サーボ制御をなすステップと、処理部において回転ブレ量信号に応じてワークに対する位置サーボ制御をなす。
(もっと読む)
レーザ干渉測長装置の絶対位置測定方法、及びレーザ干渉測長装置
【課題】レーザ干渉測長装置に対する再帰反射体の絶対位置を精度良く測定できる絶対位置測定方法を提供する。
【解決手段】絶対位置測定方法は、予め設定された3つ以上の各位置に再帰反射体をそれぞれ位置付ける工程S1,S4と、回転機構を動作させ、前記各位置にそれぞれ位置付けられた再帰反射体に対して測定光を出射可能とする各姿勢に干渉計を設定する工程S2と、回転機構の動作量に基づいて前記各姿勢間での測定光の光軸の角度変化量を算出する工程S5と、干渉計から出力される信号に基づいて前記各姿勢間での前記光軸に沿う方向の再帰反射体の位置変化量を算出する工程S6と、前記各位置、角度変化量、及び位置変化量に基づいて、レーザ干渉測長装置の基準位置を算出する工程S7と、基準位置に対する再帰反射体の絶対座標を算出する工程S8とを備える。
(もっと読む)
対象領域抽出装置
【課題】 距離情報データに含まれるノイズを除去等する。
【解決手段】 対象領域抽出手段B10は、センサB02から得られる輝度情報データに基づいて、所定以上の輝度の存在する隣接画素数がしきい値以下の部分を削除するための輝度情報マスクを生成する。輝度情報マスクを距離情報データに重ね合わせ、輝度情報マスクに重複する領域の距離情報データだけを抽出する。
(もっと読む)
撮像装置、物体検出方法及び姿勢パラメータの算出方法
【課題】特定のランドマークを設置しないでも、精度良く撮像装置の姿勢パラメータを取得可能な姿勢キャリブレーションを実現する。
【解決手段】撮像部により撮像された画像に含まれる物体を検出し、検出された少なくとも2つの物体について、それぞれ撮像された画像における正立状態からの回転角度を算出し、算出された前記少なくとも2つの物体の回転角度から撮像装置の設置角度に関する姿勢パラメータを算出する。
(もっと読む)
車載機器制御装置
【課題】ユーザの視線によってスイッチを選択する車載機器制御装置において、車両前方を見ることが疎かになることなく、ユーザが所望するスイッチを精度よく選択できるようにすること。
【解決手段】HUDによって車両2のフロントウィンドウ41のスイッチ表示領域60に複数のスイッチ61〜64を表示させる。運転者が車両前方を注視していときに視線が通常位置する領域として、フロントウィンドウ41の一部の領域と重複する形で視線監視領域50を定める。カメラ4によって撮像された運転者の眼球の画像に基づいて、運転者の視線が視線監視領域50から外れたか否かを判断する。外れた場合には運転者の視線の動きを追跡し、複数のスイッチ61〜64のうち、視線が最も長く停留したスイッチ、視線が最後に通過したスイッチ又は視線の進行方向にあるスイッチを、運転者が所望するスイッチとして決定する。
(もっと読む)
光学式距離測定機器
【課題】個々の光学要素が理想的に位置決めされていない場合にも、測定エラーを回避でき、更に、基準反射器を軸にして測定光束を旋回できる光学式距離測定機器を提供する。
【解決手段】光源により発光された光束は、基準反射器の中心を軸にして旋回自在である。光源から届く光束を、光束分割要素を介して少なくとも一つの測定光束と基準光束に分割する。少なくとも一つの測定光束は、測定反射器の方向に進み、そして基準光束が、少なくとも一つの測定光束に対して同一線上を基準反射器の方向に進む。測定反射器により測定光束の逆反射が、そして基準反射器により基準光束の逆反射が、光束結合ユニットの方向に行われ、その時に少なくとも一つの測定光束が、測定反射器での反射の前後で基準反射器に対して対称に延伸する。光束結合ユニットが測定光束と基準光束を干渉させる。検知ユニットを介して、距離に関係する干渉信号を検出することができる。
(もっと読む)
空間座標測定システムおよび空間座標測定方法
【課題】 角度情報を使用せずに、距離情報のみでターゲットの空間座標を精度良く特定することができる空間座標測定システムおよび空間座標測定方法を提供する。
【解決手段】 この空間座標測定システムは、測定物W上に設けられた一つのターゲットTgの空間座標を求める空間座標測定システムである。空間座標がそれぞれ特定された少なくとも3個以上のレーザートラッカー1と、前記3個以上のレーザートラッカー1のうちの3個のレーザートラッカー1から、前記一つのターゲットTgに対しレーザー光Lbをそれぞれ照射させて測定した3箇所の距離の測定値と、前記3個のレーザートラッカー1の空間座標とから、前記ターゲットTgの空間座標を求める演算手段3とを有する。
(もっと読む)
検測車の車体歪み測定方法および測定装置
【課題】
車体歪みによる基準レーザ光の上下変動の範囲を抑えることで車両の床下と車体フレームとの間に車体歪み測定装置を設置することが可能でかつ検測車の床上には多くの機器、測定装置を搭載するスペースを確保することができる検測車の車体歪み測定方法および測定装置を提供することにある。
【解決手段】
この発明は、レーザ投光器と第1の受光器との間にレーザビームを受けてその光軸の角度を調整する角度調節器を設けることで歪みによるレーザビームの光軸の変動、特に、上側への変動を角度調節器で調節できるようにして検測車の床下に設ける第1,第2の受光器の高さを低く抑え、この角度調節器とレーザ投光器と第1および第2の受光器とを検測車の車体フレーム上でかつ検測車の床下に配置することができるようにしたものである。
(もっと読む)
飛翔体の三次元解析装置、およびコンピュータプログラム
【課題】 解像度が高くて画角も大きな高性能のカメラを使用することなく、高解像度を実現できる飛翔体の三次元解析装置を提供する。
【解決手段】 水平方向に離間させた二箇所から所定領域における飛翔体をステレオ撮影するための飛翔体の三次元解析装置である。前記の二箇所の各々には、複数のカメラにて構成される撮影カメラ群と、その撮影カメラ群が撮影した画像データを合成して合成画像データを作成する合成画像データ作成手段と、その合成画像データ作成手段にてそれぞれ作成された二つの合成画像データを用いて、飛翔体の三次元位置を演算するステレオ解析手段とを備える。前記の撮影カメラ群は、当該撮影カメラ群を構成する各々のカメラにおける水平方向の撮影領域が連続するとともに、垂直方向の撮影領域が同一となるように固定する。
(もっと読む)
1 - 20 / 81
[ Back to top ]