
Fターム[2F065FF39]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 回転変位→直線変位 (3)
Fターム[2F065FF39]に分類される特許
1 - 3 / 3
車載情報装置,ナビゲーション装置
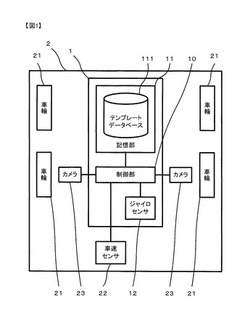
【課題】車速パルスのパルス抜けが発生している期間中の車両の走行距離を高精度で算出できる車載情報装置を提供する。
【解決手段】車載情報装置1の制御部10は、カメラ23が撮影した車輪21の撮影画像を取得する。制御部10は、取得した撮影画像と記憶部11のテンプレートデータベース111に記憶されている車輪21のテンプレート画像とのパターンマッチングに基づいて車輪21の回転数を取得する。制御部10は、車速センサ22が出力する車速パルスのパルス抜けが発生するときは、取得した車輪21の回転数に所定の係数を乗ずることにより車両2の走行距離を算出することができる。
(もっと読む)
搬送シート厚検出装置及び画像形成装置

【課題】シート材の厚さによって変位する変位部材の変位量を増幅させて検出することにより、簡素な構成で、しかも、組み付け等の精密性を高く要求されることなくシート材の厚さを効率よく検出することができる搬送シート厚検出装置を提供する。
【解決手段】
シート材S1の搬送経路16の中途部にこの搬送シート材S1の厚さに応じて変位する変位部材としてのレジストローラ対17が設けられ、このレジストローラ対17の変位量を増幅させる増幅部材としてのアクチュエータ19がレジストローラ対17に係合され、アクチュエータ19によって増幅された状態でのレジストローラ対17の変位量がフォトセンサ30〜34によって測定される。
(もっと読む)
ヘッド作動制御装置及び制御方法及びステージ装置
【課題】 本発明はヨー角による傾きが生じた場合に複数のヘッドとワークの複数の加工点とのずれを補正することを課題とする。
【解決手段】 ヘッド作動制御装置31は、補正量演算部441〜445、判定部461〜465を有する。補正量演算部441は、Y1,Y2レーザ干渉計36,37により計測された距離L1,L2との差(L1−L2)に基づいて、ヨー角に応じた補正量△Tを演算する。判定部461〜465では、補正された距離L1±△Tの値が加工位置データと一致するか否かを判定しており、一致した場合にヘッド301〜305の加工信号を出力する。これにより、ヘッド301〜305は、ヨー角θに応じて加工タイミングが時間的にずらされることになり、可動テーブル20上に載置された基板上の加工点がヘッド301〜305の加工ポイントと一致したタイミングで加工を行なう。
(もっと読む)
1 - 3 / 3
[ Back to top ]