
Fターム[2F065FF51]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 干渉利用 (1,883)
Fターム[2F065FF51]の下位に属するFターム
Fターム[2F065FF51]に分類される特許
1 - 20 / 844
光路形成装置並びにこれを備えた撮像装置、変位測定装置及び検出装置
3D表面形状測定と組み合わされた位相ステッピングシェアログラフィーのための低コヒーレント干渉計システム
観察装置
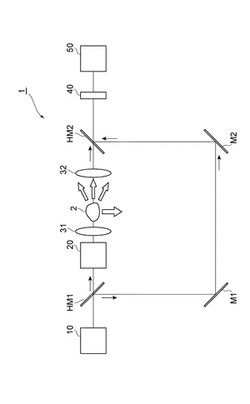
【課題】高速に移動する対象物の像を得ることができる観察装置を提供することを目的とする。
【解決手段】観察装置1は、光源部10、周波数変調部20、検出部40、及び演算部50を備える。周波数変調部は、第1の光又は第2の光を入力して、当該入力した光を、第1方向において互いに異なる複数の特定周波数Ωnだけ遷移された周波数を有し、第2方向において同一の周波数を有する光に変調する。検出部40は、対象物2で生じた散乱光のうち、検出部40に到達した光を検出し、ドップラーシフト量に応じた周波数で時間的に変化する散乱光のデータを、各時刻に出力する。演算部50は、検出部40からの出力に対して、特定周波数Ωnに基づいて複数の周波数領域に分割する処理と、時刻変数に関する1次元フーリエ変換と、周波数に関する1次元フーリエ変換とを行って得られたデータを対象物2の像として得る。
(もっと読む)
リソグラフィ装置及びデバイス製造方法

【課題】リソグラフィ装置における改良型測定システムを提供する。
【解決手段】リソグラフィ装置は、放射ビームの断面にパターンを付与してパターン付放射ビームを形成できるパターニングデバイスを支持する支持体と、基板を支持する基板テーブルと、パターン付放射ビームを基板のターゲット部分上に投影する投影システムと、測定システムであって、測定放射ビームを提供する測定放射システムと、リフレクタ間で測定ビームの一部分を反射する少なくとも2つのリフレクタと、リフレクタの1つを通して伝送される測定ビームの少なくとも一部分の波長を検出するディテクタとを備える測定システムと、を含む。
(もっと読む)
露光装置、及びデバイス製造方法
【課題】移動体の位置情報を精度良く計測できる位置計測装置を提供する。
【解決手段】位置計測装置は、移動面内を移動する移動体の位置情報を計測する。位置計測装置は、移動体の第1面に配置された移動格子に光を照射する光源と、光源との位置関係が固定で、移動格子で回折された光が入射する第2面を有し、入射した光を回折又は反射して移動格子に戻す固定光学部材と、移動格子を再度介して干渉された光を検出する検出装置と、を備え、第1面と第2面とはほぼ平行である。
(もっと読む)
角度測定方法及び角度測定システム
【課題】回転角度を高精度且つ短時間で測定すること。
【解決手段】回転が一定範囲とされた支持基準体であるエンコーダ本体2aと、エンコーダ本体2aに対し全周回転自在に軸支された駆動する回転体である回転軸3とを有し、エンコーダ本体2aに対する回転軸3の相対的な回転角度を検出する相対的角度検出手段としてのロータリエンコーダ2と、エンコーダ本体2a及び回転軸3から切り離されて、エンコーダ本体2aの回転角度を光学式角度検出手段としての非接触角度検出手段20とを備える。これにより、ロータリエンコーダ2が検出した回転角度を、非接触角度検出手段20で検出した回転角度に基づいて補正することができ、回転角度を高精度且つ短時間で測定することが可能となる。
(もっと読む)
位置測定システム、リソグラフィ装置およびデバイス製造方法
【課題】従来の較正方法と比べてあまり時間がかからない較正を適用するより正確な位置測定システムを提供する。
【解決手段】位置測定システムは、第1部分EGおよび第2部分ESと、計算ユニットと、を備える。第1部分および第2部分は、第2部分に対する第1部分の位置を表す位置信号を提供することによって第2部材に対する第1部材の位置を決定する。計算ユニットは、位置信号を受信するための入力端子を含む。計算ユニットは、使用中、位置信号に変換を適用して第2部材に対する第1部材の位置を表す信号を得るように、および、変換に調整を適用して第1部分または第2部分あるいは両方のドリフトを少なくとも部分的に補償するように、構成される。調整は、第1部分または第2部分あるいは両方のそれぞれの所定のドリフト特性に基づく。所定のドリフト特性は、第1部分および/または第2部分の1つ以上の基本形状を有する。
(もっと読む)
精密送り装置および精密移動装置
【課題】高精度な位置検出に基づく高精度な移動および位置決めが可能な精密送り装置および精密移動装置を提供すること。
【解決手段】ベース2に支持されたテーブル31を所定の移動方向へ駆動する精密送り装置9は、テーブル31に接続されたロッド41と、ロッド41を移動方向に進退駆動する駆動機構4と、ベース2に対するロッド41の変位を検出するレーザ干渉計5とを有し、駆動機構4は、ロッド41への駆動力が移動方向の軸線に対して対称に作用するリニアモータ44を有し、レーザ干渉計5のレーザ光路56はロッド41を貫通して移動方向に延びており、ロッド41の移動軸線と駆動機構4の推力軸線とレーザ干渉計5の検出軸線とが一致している。
(もっと読む)
画像取得装置および画像取得方法
【課題】受光部のフォーカス調整を容易に行う。
【解決手段】画像取得装置は、ガラス基板9上における線状の撮像領域を撮像する撮像ユニット2と、ガラス基板9を撮像領域と交差する方向に移動する移動機構とを備える。撮像ユニット2は、光照射部21および受光部23を有し、光照射部21により撮像領域に光が照射され、撮像領域からの光が受光部23のラインセンサへと導かれる。画像取得装置では、受光部回動機構が受光部23を回転することにより受光部23の光軸J2とガラス基板9の法線Nとのなす検出角θ2が変更される。撮像ユニット2は、光軸J2に沿って受光部23を移動する受光部移動機構をさらに備え、検出角θ2の変位量に基づいて受光部移動機構を制御することにより、光軸J2上においてラインセンサの受光面と共役な位置Pがガラス基板9の表面に配置される。これにより、受光部23のフォーカス調整が容易に行われる。
(もっと読む)
複数波長による表面形状測定方法およびこれを用いた装置
【課題】 光干渉法を用いて、1波長の単色光を測定対象面に照射し、測定対象面までの距離を変更して、少なくとも3枚以上の画像を撮像して、各画素の輝度値から位相計算をおこない、隣接画素の位相値を用いて三次元形状を測定する位相シフト法が用いられて来たが、隣接画素間の段差に波長による制約があった。
【解決手段】広帯域な波長特性を有する照射光から波長の異なる複数の単色光を抽出し、それらを混在させて、分岐手段を介して測定対象面と参照面に同時に照射し、測定対象面と参照面とから反射して同一光路を戻る反射光によって生じる干渉縞の画像を測定対象面と参照面とからの反射光路長の差を変化させて、取得した前記複数枚の画像を単色光ごとに分解し、単色光ごとに求めた各画素の位相から、複数個の表面高さの候補群を求め、各候補群から共通する高さを実高さとして求める。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】経年変化に伴ってレーザー測長系のレーザー光源の出力特性が変化しても、移動ステージの位置を精度良く検出して、基板の位置決めを精度良く行う。
【解決手段】移動ステージに複数の反射手段34a,34b,35を取り付け、複数のレーザー干渉計32a,32b,33により、レーザー光源31a,31bからのレーザー光と各反射手段34a,34b,35により反射されたレーザー光との干渉を複数箇所で測定する。各レーザー干渉計32a,32b,33の測定結果から、移動ステージの位置を検出し、検出結果に基づき、移動ステージによりチャック10a,10bを移動して、基板1の位置決めを行う。各レーザー干渉計32a,32b,33が受光したレーザー光の強度の変化を検出し、検出したレーザー光の強度の変化を補う様に、レーザー光源31a,31bへ供給する駆動電流を制御する。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
FBG光ファイバセンサ型ひずみセンサ
【目的】本発明は、ひずみセンサの構築に際して、FBGの多重化に時間多重化方式を用いたFBG光ファイバセンシング技術を使用して構築し、FBG光ファイバ型ひずみセンサを高密度に配置することが出来るセンサとなし、もって高密度のひずみ分布を詳細に、正確に計測できるひずみセンサを提供することを目的とする。
【構成】複数のFBGにつき所定間隔をあけて1本の光ファイバ上に配置した1本のセンサ本線を複数本用意し、複数本のセンサ本線を長手方向に向かい平行に並べると共に、いずれかのセンサ本線に配置されたFBGと、該FBGに隣り合う他のいずれかのセンサ本線に配置されたFBGとの間隔を任意の間隔で密になしえ、密な間隔で配置されたFBGについてそれぞれひずみ計測を可能とした、ことを特徴とする。
(もっと読む)
構造物内空変位計測方法及びその装置
【課題】トンネルをはじめとした構造物の内空変位を計測し、該構造物の変状を監視する技術を提供すること。とくに工事中のトンネルや地下鉱山のトンネルのように粉塵が浮遊している空間に対しても、広範囲にわたって内空変位を計測しモニタリングできる方法を提供すること。
【解決手段】計測対象となる構造物の内側に内空変位センサである梁の一端を固定し、当該梁の表面にひずみ計測が可能な装置を設置し、当該装置により計測されたひずみから、当該構造物の鉛直方向および水平方向の変位を算出する構造物内空変位計測方法
(もっと読む)
形状計測装置、横座標校正方法及び光学素子の製造方法
【課題】汎用性の高い横座標の校正方法によって横座標を校正する形状計測装置、及びその横座標校正方法を提供する。
【解決手段】複数の開口が形成され、これら複数の開口の配列によって校正パターンを形成するアパーチャー板20をワークWの被検面Wsの前面に配置する。この開口を通過すると共に、被検面Wsで反射され、再度開口を通過した測定光Lmを撮像素子5によって検出する。撮像素子上にて結像した校正パターンの横座標位置と、予め計測されている校正パターンの基準横座標位置とを、演算装置7によって比較することによって、形状計測装置1の横座標を校正する。
(もっと読む)
画像センサのチルトを求めるための方法
【課題】カメラに取り付けられた画像センサのチルトを求めるための、改善された方法を提供する。
【解決手段】カメラ12における画像センサ10表面の、カメラ12のレンズ基準面26に対するチルトを求めるための方法であり、画像センサ10に光を送るステップと、画像センサ10から反射した光を受けるステップと、反射光における干渉パターンを特定するステップと、干渉パターンの特徴を特定するステップと、干渉パターンにおいて特定された特徴の位置に基づいて画像センサ10表面のチルトを求めるステップとを含む。
(もっと読む)
位置計測装置、それを用いた被加工物の製造方法および成形品
【課題】ワークディスタンスが変化しても計測可能な位置計測装置でかつ、高分解能化可能な位置計測装置を提供する。
【解決手段】目盛部30を、第1及び第2反射面31,32の相対距離が周期的に変化するように構成し、受光センサ14によって、これら第1及び第2反射面31,32に反射された光によって形成された干渉光の光強度を計測する。この干渉光の光強度の周期変化を演算部20によって位置情報に演算することにより、ワークディスタンスの変化に係わらず計測対照の位置を計測する。
(もっと読む)
温度計測システム、基板処理装置及び温度計測方法
【課題】光干渉を利用して温度を適切に測定することができる温度計測システム、基板処理装置及び温度計測方法を提供する。
【解決手段】温度計測システム1は、光源10、分光器14、光伝達機構11,12、光路長算出部16及び温度算出部20を備える。光源10は、測定光を発生させる。光伝達機構11,12は、測定対象物13の表面13a及び裏面13bからの反射光を分光器14へ出射する。分光器14は、反射光の強度分布である干渉強度分布を測定する。光路長算出部16は、フーリエ変換し光路長を算出する。温度算出部20は、光路長と温度との関係に基づいて測定対象物13の温度を算出する。光源10は、分光器14の波長スパンΔwに基づいた条件を満たす半値半幅Δλの光源スペクトルを有する。分光器14は、波長スパンΔwと計測最大厚さdとに基づいた条件を満たすサンプリング数Ncで強度分布を測定する。
(もっと読む)
位置計測装置、それを用いた被加工物の製造方法及び成形品
【課題】高精度に移動体の位置を計測可能な位置計測装置を提供する。
【解決手段】位置計測装置1は、周期的に高さが増減する目盛パターンが形成された目盛部30の高さ変位を、変位センサ10によって計測する。そして、この変位センサ10によって計測された高さの周期的な変位を、演算部20によって位置情報に演算して、移動体の位置を計測する。目盛部30の目盛パターンは、平面の組み合わせによって形成されるため、変位センサ10の出力電圧は平面の傾きに応じた直線を組み合わせた波形となる。
(もっと読む)
基板検査装置および基板検査方法
【課題】基板に形成された凹部の形状を、非破壊、非接触にて検査する技術を提供する。
【解決手段】基板検査装置100は貫通ビアWH(凹部)が形成されている基板Wを検査する。基板検査装置100は、ポンプ光の照射に応じて、基板Wに向けてテラヘルツ波を照射する照射部12と、プローブ光の照射に応じて、基板Wを透過したテラヘルツ波の電場強度を検出する検出部13と、テラヘルツ波が基板Wの貫通ビア形成領域を透過する透過時間と平坦領域を透過する透過時間との時間差を取得する時間差取得部24と、該時間差に基づいて貫通ビアWHの深度を算出するビア深度算出部26とを備える。また、基板検査装置100は、ビア深度算出部26により算出した貫通ビアWHの算出深度と、干渉法を利用する深度測定装置16によって測定した貫通ビアWHの実測深度とに基づいて、貫通ビアWHの形状を示す形状指標値を取得する形状指標取得部27を備える。
(もっと読む)
1 - 20 / 844
[ Back to top ]