
Fターム[2F065FF65]の内容
光学的手段による測長装置 (194,290) | 測定方法 (22,691) | 非光学的手段との組合せ (1,677) | 角度 (528)
Fターム[2F065FF65]の下位に属するFターム
回転量 (157)
Fターム[2F065FF65]に分類される特許
1 - 20 / 371
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
傾斜測定装置およびその方法
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法
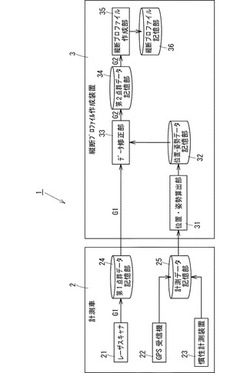
【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
目標位置検出装置、該検出装置に用いられる目標位置検出方法及び目標位置検出プログラム

【課題】夜間でも複数の目標対象物の捜索が可能な目標位置検出装置を提供する。
【解決手段】目標対象物位置特定手段(画像処理・座標演算装置21)により、画像記録部33に記録されている赤外画像iu、及びデータ記録部34に記録されているGPS/姿勢データfdが解析され、発熱物体が存在する位置が目標対象物の位置として特定される。この場合、画像処理・座標演算装置21により、赤外画像iu及びGPS/姿勢データfdに基づいて、各赤外画像iu上の発熱物体の座標位置を、赤外カメラ13の位置を基準とする方位ベクトル線に対応付けることにより、発熱物体に対して時系列の方位ベクトル線群が生成され、方位ベクトル線群を構成する各方位ベクトル線の共通部分が目標対象物の絶対座標(緯度、経度、及び高さ)として特定されて対象地点座標データedが出力される。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
移動環境認識装置及び方法
【課題】高精度に測定対象の形状認識情報を得る。
【解決手段】測定対象までの距離画像データを得る距離画像測定工程ステップST1と、この距離画像測定工程で得た距離画像データに基づき、所定のデータの集合体からなるラベリング領域を作成するラベリング処理工程ステップST2〜ステップST7と、このラベリング処理工程で作成した複数のラベリング領域に基づいて複数の上面データを形成する上面データ形成工程ステップST8と、この上面データ形成工程で形成した複数の上面データに基づいて測定対象の形状を認識する形状認識工程ステップST9〜ステップST13と、を備えた移動環境認識方法である。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
空隙量測定装置及び空隙量測定方法
【課題】着用物の種別に関わらず身体との間の空隙量を正確に測定することのできる空隙量測定装置及び空隙量測定方法を提供すること。
【解決手段】空隙量測定装置1は、人体模型20を載置する台座部12及び測定対象物に対してレーザー光を投光することで当該測定対象物までの距離を測定するセンサ部11を備える距離測定装置10と、センサ部11のレーザー光を透過する部材で構成され、上部が開口するとともにその内部が空洞状に形成された人体模型20と、距離測定装置10が測定した距離から着用物と人体模型との間の空隙量を算出する演算装置30と、を備える。このとき、センサ部11は、人体模型20の内部から当該人体模型20に着用された着用物の着用面に対してレーザー光を投光することで着用面までの距離を測定し、演算装置30は、着用物の着用面までの距離から空隙量を算出する。
(もっと読む)
露光装置の調整方法、形状測定方法および形状測定装置
【課題】高精度に調整可能な露光装置の調整方法を提供することにある。
【解決手段】本発明の露光装置の調整方法は、鏡面部に光散乱部位を有する鏡面部材を有する露光装置の上記鏡面部に対し、レーザー光を照射する工程と、上記鏡面部の上記光散乱部位からの上記レーザー光の散乱光に基づき、上記光散乱部位までの距離を演算する工程と、上記演算工程に基づき上記鏡面部の形状を判定する工程と、上記判定結果に基づき、上記鏡面部の形状を調整する工程と、を有する。かかる方法によれば、鏡面部であっても光散乱により鏡面部の形状認識が可能となり、これに基づき、鏡面部の表面形状を調整することで、露光光の平行度の補正を効果的に行うことができる。
(もっと読む)
露光装置及びデバイス製造方法
【課題】 遮光位置のずれを低減する技術の提供。
【解決手段】 原版を光で照明する照明系、前記原版のパターンの像を基板に投影する投影系を有する光学系を備える露光装置で、前記光学系の光路上の前記投影系の物体面と共役な面かその近傍に配置され、前記像が前記基板上に投影される領域の外縁の一部を円弧状に規定する円弧状部を有する遮光板と、前記光学系の光路に沿った回転軸まわりに前記遮光板を回転駆動する回転駆動部と、前記回転軸と交わる方向に前記遮光板をシフトするシフト駆動部と、前記回転駆動部により前記遮光板を回転駆動させ、前記光学系により前記像を前記基板に投影する際の基準となる基準軸と前記回転軸との相対位置の情報を取得する取得部と、前記基板の周辺部に対して前記像を投影する場合、取得した前記相対位置に関する情報に基づき、前記遮光板が所定の位置になるように前記回転駆動部と前記シフト駆動部を制御する制御部を有する。
(もっと読む)
形状測定方法及び形状測定装置
【課題】被検物の表面形状を短時間で測定可能な形状測定方法を提供する。
【解決手段】形状測定方法は、n=1〜N(Nは3以上の整数)とし、参照光の光軸上において異なるN個の位置を第1位置〜第N位置と称するとき、参照面を第n位置に固定し、物体光を被検物の光軸と所定の角度をなす方向から照射して、被検物をその光軸を中心に回転させながら、干渉縞を、被検物上で重複領域を有して隣接し合う複数の領域ごとに取得される複数の第n干渉縞として取得する第n工程を備え、第1工程から第N工程を行う干渉縞画像取得工程S11の後に、複数の領域のそれぞれに対応する干渉縞を用いて位相解析を行い、部分表面形状データを取得する位相解析工程S12と、部分表面形状データを重複領域でつなぎ合わせて被検物の輪帯状領域又は全体の表面形状データを取得する統合工程S13と、を備える。
(もっと読む)
情報処理装置及び情報処理方法
【課題】計測装置と計測対象物体との間の位置または/及び姿勢の関係があいまい性を含んだ場合であっても、高精度に物体の位置姿勢を計測できるようにする。
【解決手段】撮像時刻におけるロボットのモーション情報から、撮像装置と対象物体の位置姿勢移動量に変換して計測データとして位置姿勢更新に用いる。ロボットのモーション差分という確度の高い情報を計測データとして加えることにより、精度および安定性を向上させるようにする。また、撮像時刻の異なる距離画像と濃淡画像の幾何的関係を、ロボットアームの軌跡情報を用いて求めることで、両者の情報を同時に利用して位置姿勢推定を行うようにすることにより、全体のデータを同時に用いることを可能にする。
(もっと読む)
三次元計測システム及び三次元計測方法
【課題】ロボットの座標系に依存しない、三次元計測システムを提供する。
【解決手段】計測対象の三次元形状を計測する三次元計測器20と、この三次元計測器20を移動させるロボット10と、ロボット10を駆動制御するロボット制御装置30と、を備えた三次元計測システム1であって、ロボットのアーム先端に固定され三次元計測器を支持したベースプレート60と、ベースプレートに固定された三次元計測器20の傾きを計測するロボット計測装置40と、ワーク計測箇所の座標及びワークの形状寸法を算出するデータ処理装置50と、を備えている。
(もっと読む)
鉄筋領域抽出装置、鉄筋領域抽出方法及び鉄筋領域抽出プログラム
【課題】簡単に精度よく鉄筋の配筋情報を取得する。
【解決手段】配筋情報取得システム1において、携帯端末4は、背景バーBの部分に相当する画像全体から、マーカMK1及びMK2を検出する(S901)。次に、マーカMK1と、MK2との間にある画像を切り出す(S902)。その画像において、鉄筋の軸方向に垂直な方向で、ピクセルの輝度が不連続な箇所を検出することにより、領域の境界線となるエッジを抽出する(S903)。続いて、抽出されたエッジのうち、不要なエッジを除去する(S904)。次に、画像の輝度分布に対して度数分布を作成し、その度数分布に基づいて鉄筋、影、背景の3つの領域における代表輝度値を計算し、各代表輝度値を用いて、各エッジに挟まれた領域をいずれかに特定する(S905)。さらに、特定した領域のうち、エッジを挟んで隣り合う領域が同じである場合、その2つの領域を1つの領域として統合する(S906)。
(もっと読む)
タイヤ状態検出方法及び装置
【課題】タイヤのスリップ角とキャンバー角を同時に効率よく測定でき、かつタイヤの交換を容易に行うことができるタイヤ状態検出方法及び装置を提供する。
【解決手段】撮像カメラ16で撮像した角度検出用回転体14の画像データを基にタイヤ1204のキャンバー角αを求め、さらに、撮像カメラ16で撮像した走行路面28の画像データと角度検出用回転体14の画像データを基にタイヤ1204のスリップ角βを求める構成にした。
(もっと読む)
3次元計測装置およびその方法
【課題】計測装置が揺動する状況下であっても、計測対象の3次元形状を好適に計測することができる3次元計測装置を提供する。
【解決手段】撮像装置12により撮像された画像データを含む撮像情報を取得する撮像部11と、撮像情報に基づいて計測対象の3次元座標を取得する3次元形状演算処理部23と、撮像装置12の加速度および姿勢角度を含む位置姿勢情報を撮像情報の取得と同期して取得する位置姿勢計測部14と、位置姿勢情報に基づいて計測原点に対する撮像装置12の移動量・方向と姿勢角度の変化量・方向とを演算する位置姿勢補正処理部17と、撮像情報と同期して取得された撮像装置12の移動量および方向と姿勢角度の変化量および方向とに基づいて3次元形状演算処理部23により得られる3次元座標を平行移動および回転して複数の3次元座標を統合し、計測対象の3次元形状を取得する統合演算処理部24とを備えた。
(もっと読む)
物体識別装置及び物体識別プログラム
【課題】検知対象物の一部が他の障害物によって隠れているような状況下でも、その検知対象物の形状を正確に識別することができるようにする。
【解決手段】検知対象物上の各点の法線を算出する法線算出処理部3と、検知対象物上の各点を通過する直線を生成する直線生成処理部4と、3次元空間内の一定範囲の区切りである格子の中で、直線生成処理部4により生成された直線が通過する格子を特定する通過格子特定処理部5と、通過格子特定処理部5により特定された格子に対する投票を行う投票処理部6とを設け、形状推定処理部7が、3次元空間内の各格子に対する投票処理部6の投票結果から検知対象物の形状を推定する。
(もっと読む)
測距装置
【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
表示装置、電子機器、およびプログラム
【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
1 - 20 / 371
[ Back to top ]