
Fターム[2F065GG23]の内容
光学的手段による測長装置 (194,290) | 光源 (11,799) | 波長 (2,573) | 複数波長 (595)
Fターム[2F065GG23]に分類される特許
1 - 20 / 595
接触部検出装置および接触部検出方法
表面欠陥検査方法及び表面欠陥検査装置
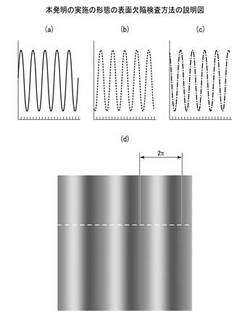
【課題】 表面欠陥検査方法及び表面欠陥検査装置に関し、欠陥検査の検知精度の向上を図るために位相シフトを用いつつ検査時間を低減する。
【解決手段】 互いに異なった複数の波長をそれぞれ独立に変調した明暗パターンをパターン平面上で互いに変調させて合成照明パターンを合成し、前記合成した合成照明パターンを検査対象物に照射し、前記検査対象物からの前記合成照明パターンの反射パターンを撮像して波長毎の画像を一括して取得し、前記撮像した画像を波長毎に分解して前記検査対象物の表面の凹凸欠陥を判別する。
(もっと読む)
端子検査装置及び端子検査方法

【課題】二股形状端子の側面の状態が変化した場合であっても高精度に先端部の間の隙間距離を測定することが可能な端子検査装置、及び端子検査方法を提供する。
【解決手段】二股形状端子の長手方向に対して平行となる軸方向から、該二股形状端子に向けて青色光を照射し、且つ、軸方向に対して所定角度傾斜した方向から二股形状端子に向けて赤色光を照射する。そして、二股形状端子に照射された青色光、及び赤色光をカメラ14にて撮影し、撮影した画像から青色光、赤色光を抽出する。この抽出結果に基づいて、二股形状端子の側面状態に応じた適切な隙間演算プログラムを選択し、この隙間演算プログラムを用いて二股形状端子の隙間距離dを求める。
(もっと読む)
位置検出装置および露光装置
【課題】波長差に起因する計測誤差を低減して高精度な位置検出を行う位置検出装置を提供する。
【解決手段】基準マークSMを利用して被検出体WMの位置を検出する位置検出装置であって、第1の波長帯域を有する計測光を用いて被検出体WMを照明する第1の照明光学系5と、第2の波長帯域を有する基準光を用いて基準マークSMを照明する第2の照明光学系13と、被検出体WMからの光束および基準マークSMからの光束を検出する検出光学系10と、検出光学系10で検出された光束に基づいて被検出体WMの位置を検出する位置検出部48とを有し、基準光の第2の波長帯域は、計測光の第1の波長帯域の上限と下限との間に設定されている。
(もっと読む)
計測装置
【課題】コストの増加を抑えながら参照面と被検面との間の光路長差の変化に起因する計測誤差を低減し、参照面と被検面との間の距離を計測する計測装置を提供する。
【解決手段】周波数を走査可能なn(n=2以上の整数)個の光源と、前記n個の光源からのそれぞれの光を分割し、参照面と被検面とに入射させる分割素子と、前記参照面で反射された光と、前記被検面で反射された光との干渉により形成されるn個の干渉光を検出して干渉信号を出力する検出部と、前記距離を求める処理部と、前記処理部は、前記n個の光源のうち1つの第1光源からの光の周波数を第1方向に第1走査速度で走査するように制御し、且つ、前記n個の光源のうち他の1つの第2光源からの光の周波数を第1方向とは逆の第2方向に前記第1走査速度とは異なる第2走査速度で走査するように制御し、前記n個の光源を制御している間の前記干渉信号に基づいて、前記距離を求める。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
光干渉システム、基板処理装置及び計測方法
【課題】測定可能な膜厚の上限値を容易に変更することができる光干渉システム、基板処理装置及び計測方法を提供する。
【解決手段】光干渉システム1は、光源10、コリメータ12、単一の受光素子41、チューナブルフィルタ40及び演算装置15を備える。コリメータ12は、光源10からの測定光を測定対象物の第1主面へ出射するとともに、第1主面及び第2主面からの反射光を入射する。単一の受光素子41は、コリメータ12からの光の強度を取得する。チューナブルフィルタ40は、受光素子41に入射される光の波長を掃引する。演算装置15は、チューナブルフィルタ40及び受光素子41を用いて、波長に依存した強度分布であって第1主面及び第2主面からの反射光の強度分布である干渉強度分布を測定し、干渉強度分布をフーリエ変換して得られる波形に基づいて測定対象物の厚さ又は温度を計測する。
(もっと読む)
雲の含水率を決定する方法
【課題】雲の含水率を決定する方法を提供する。
【解決手段】雲の含水率は、雲の水滴サイズ分布から導出される。雲の水滴のサイズ分布を決定する方法は、雲の深さを電磁放射ビームによりサンプリングすることと、雲から戻った電磁放射のエコー強度を検出器により測定することと、測定エコー強度から測定光減衰係数を決定することと、測定エコー強度から測定後方散乱係数を決定することと、測定光減衰係数及び測定後方散乱係数からライダー比を決定することと、ライダー比から水滴の形状パラメータ(μ)及びメジアン体積径(DMVD)を含む値ペアを決定することと、値ペア(μ,DMVD)を使用して水滴のサイズ分布を決定することとを含む。
(もっと読む)
多波長干渉計、計測装置および計測方法
【課題】 被検面が傾いていても測定精度を悪化させることのない多波長干渉計を提供する。
【解決手段】 波長が互いに異なる少なくとも2つの光束を参照光と被検光とに分割し、分割された参照光の周波数と被検光の周波数とを異ならせ、被検光と参照光とを干渉させる干渉計において、干渉光を複数の光束に分割する分割部を有し、分割された複数の光束を各波長について検出する。
(もっと読む)
計測装置
【課題】簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供する。
【解決手段】計測装置は、第1光源、第2光源、第1検出器、第2検出器及び算出部を備える。第1光源は第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する。第2光源は第3波長の第2光を生成する。第1検出器は第1光を参照面及び被検面に各々照射することで生成された第1干渉縞を検出する。第2検出器は第2光を参照面及び被検面に各々照射することで生成された第2干渉縞を検出する。第3波長は第1波長及び第2波長の合成波長より短い。算出部は第1時刻において第2干渉縞の位相のデータから第2干渉縞の次数が算出できなくなった場合に、第1時刻より後の走査区間における第1干渉縞の位相の変化に基づいて第1時刻以降における第2干渉縞の次数を算出し、該算出された第2干渉縞の次数を用いて第1時刻以降における被検面の形状を算出する。
(もっと読む)
対象物識別方法と装置
【課題】対象物が太陽に直接照らされていても、対象物が遠くに位置していても、対象物を撮像して得た画像において、対象物の位置を識別できるようにする。
【解決手段】第1の波長域の光を吸収し、かつ、第2の波長域の光を反射する光学特性部3を、対象物1に取り付ける。第1の波長域の光を第1撮像部5aに入射させ、かつ、第2の波長域の光を、第1撮像部以外の位置へ反らし、または、吸収する第1光学系6と、第2の波長域の光を第2撮像部5bに入射させる第2光学系8と、を用意する。第1撮像部5aにより、第1光学系6を介して、対象物1を含む領域を撮像して第1画像を生成するとともに、第2撮像部5bにより、第2光学系8を介して、対象物1を含む領域を撮像して第2画像を生成する。第1画像の各画素の輝度Aと、対応する第2画像の画素の輝度Bとの比率B/Aを求め、この比率に基づいて、光学特性部3の位置を特定する。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
複数波長による表面形状測定方法およびこれを用いた装置
【課題】 光干渉法を用いて、1波長の単色光を測定対象面に照射し、測定対象面までの距離を変更して、少なくとも3枚以上の画像を撮像して、各画素の輝度値から位相計算をおこない、隣接画素の位相値を用いて三次元形状を測定する位相シフト法が用いられて来たが、隣接画素間の段差に波長による制約があった。
【解決手段】広帯域な波長特性を有する照射光から波長の異なる複数の単色光を抽出し、それらを混在させて、分岐手段を介して測定対象面と参照面に同時に照射し、測定対象面と参照面とから反射して同一光路を戻る反射光によって生じる干渉縞の画像を測定対象面と参照面とからの反射光路長の差を変化させて、取得した前記複数枚の画像を単色光ごとに分解し、単色光ごとに求めた各画素の位相から、複数個の表面高さの候補群を求め、各候補群から共通する高さを実高さとして求める。
(もっと読む)
計測装置
【課題】簡易な構成で参照面と被検面との間の絶対距離を高精度かつ高速に計測可能な計測装置を提供すること
【解決手段】波長走査干渉計は、複数の光源IL1〜IL3と、複数の光束を合成するビームスプリッタ103bと、ビームスプリッタ103bからの光を参照光束と被検光束に分割し、干渉計ユニット300によって検出された干渉信号に基づいて参照面と被検面との間の絶対距離を決定する処理部107と、を有する。干渉計ユニットは、複数の種類の光束に対応する複数の種類の干渉縞のそれぞれを、合成された干渉信号S100として検出する単一の光検出部106を有し、処理部は、合成された干渉信号に対してFFTを行って複数の種類の光束のそれぞれについて絶対距離L1〜L3を取得し、取得した複数の絶対距離を演算して一つの絶対距離L4を出力する。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置の基板位置決め方法、及び表示用パネル基板の製造方法
【課題】安価な構成で、チャックのθ方向の傾きを精度良く検出して、基板のθ方向の位置決めを精度良く行う。
【解決手段】第1のステージに搭載されY方向(又はX方向)へ移動する第2のステージに第2の反射手段(35)を取り付け、第2の反射手段(35)のθ方向の位置ずれを検出する。チャック(10a,10b)に複数の光学式変位計(41)を設け、複数の光学式変位計(41)により、第2のステージに取り付けた第2の反射手段(35)までの距離を複数箇所で測定する。第2の反射手段のθ方向の位置ずれの検出結果に基づき、複数の光学式変位計(41)の測定結果から、チャック(10a,10b)のθ方向の傾きを検出し、検出結果に基づき、第3のステージによりチャック(10a,10b)をθ方向へ回転して、基板(1)のθ方向の位置決めを行う。
(もっと読む)
個体識別装置、個体識別方法、及びプログラム
【課題】所定の特性を有する微小細粒(タガント)を物品に付与し、更にその分布位置に基づいて高精度に個々の物品を識別することが可能な個体識別装置等を提供する。
【解決手段】個々の物品1の基材10上に、基材とは異なる光学反射特性を有し、かつ、異色の微細物質12、並びに特徴的な図案及び形状等を有する微細物質をランダムに配置しておく。また個々の物品をスキャナ等により光学的に読み取り、所定の画像処理を施して微細物質の特徴点及びその特徴点における色情報に関する特徴量を抽出し、基準特徴量データとして記憶部に記憶しておく。識別対象となる物品を上述の読み取りの際と同様の手法で読み取り、同様の画像処理を施して微細物質の対象物特徴量データを抽出する。そして、抽出した対象物特徴量データと記憶されている基準特徴量データとを比較することにより識別対象とする物品と基準物品とが同一個体であるか否かを判定する。
(もっと読む)
計測装置
【課題】高速かつ高精度に被検面の形状を計測することが可能な計測装置を提供すること
【解決手段】計測装置は、光コム光源101から射出された光束を、被検光束と参照光束に分割するPBS15と、前記参照光束と前記被検光束の光路長差を変化させる遅延素子9と、前記被検光束と前記参照光束が干渉して形成する干渉縞を撮像する撮像素子24と、遅延素子が光路長差を変化させて撮像された干渉縞の信号に基づいて被検面23の位置を算出する解析器25と、を有する。
(もっと読む)
計測装置および計測方法
【課題】高精度に被検面と参照面の間の絶対距離を計測可能な計測装置および計測方法を提供する。
【解決手段】第1の基準波長λ1と第2の基準波長λ2との間で波長走査が可能な光源11と、第3の基準波長λ3の光を射出する光源10を有する光波干渉計測装置は、各波長に対応した干渉光の信号に基づいて被検面と参照面との間の光路長に相当する位相の誤差を補正し、誤差が補正された位相に基づいて被検面と参照面の間の絶対距離を算出する処理部19を有する。
(もっと読む)
表面形状測定方法および装置
【課題】 表面形状測定において、測定対象面と参照面からの反射光により干渉縞を発生させ、各画素の位相を単色光ごとに求め、表面形状を測定において、波長の異なる複数の単色光を得る場合は、抽出手段を増設する必要が生じていた。
【解決手段】 照射手段を介して測定対象面と参照面に波長の異なる複数の単色光を照射し、測定対象面と参照面の両方から反射して同一光路を戻る反射光によって生じる干渉縞の強度値に基づいて、測定対象面の表面高さと表面形状を求める表面形状測定方法において、前記照射手段が、広帯域な波長特性を有する照射光から、音響光学フィルタを用いて任意の異なる波長の単色光を複数抽出し、同時に混在して照射する照射手段を用いる。
(もっと読む)
圧着端子検査装置および圧着端子検査方法
【課題】検査作業者の技量にかかわらず、圧着端子を精度よく検査できる、圧着端子検査装置および圧着端子検査方法を提供する。
【解決手段】圧着端子3の検査時には、検査作業者により、圧着端子検査装置1の端子配置部に圧着端子3が配置されて、圧着端子3が延伸方向に延びる軸線を中心に揺動される。この揺動中に、ハイト測定用エリアイメージセンサ14の撮像面141への圧着端子3の投影における第1測定位置Piおよび第2測定位置PwでのY軸方向寸法Yi,Ywが測定される。そして、Y軸方向寸法Ywの極小値Ywminが圧着端子3のワイヤバレル部32のクリンプハイトHwとして取得される。
(もっと読む)
1 - 20 / 595
[ Back to top ]