
Fターム[2F065HH00]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091)
Fターム[2F065HH00]の下位に属するFターム
Fターム[2F065HH00]に分類される特許
1 - 20 / 84
表面形状測定装置および半導体ウェハ検査装置
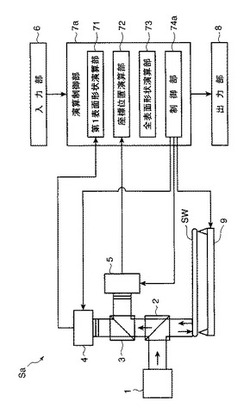
【課題】本発明は、半導体ウェハにおける表面形状の測定に適した精度で、そして、より短時間でその表面形状を測定し得る表面形状測定装置および半導体ウェハ検査装置を提供する。
【解決手段】本発明の表面形状測定装置Saは、測定対象である半導体ウェハSWの表面に所定の波面を持つ測定光を照射するための光源部1と、半導体ウェハSWの表面で反射した測定光の反射光における波面の形状を測定する波面センサ4と、波面センサ4で測定した反射光における波面の形状に基づいて半導体ウェハSWにおける表面の形状を求める演算制御部7aとを備える。そして、半導体ウェハ検査装置は、このような表面形状測定装置Saを備えて構成される。
(もっと読む)
検査装置および検査方法

【課題】検査対象に形成されたパターンの寸法や位置の変動を正確に求めることが可能な検査装置および検査方法を提供する。
【解決手段】パターンが形成された試料に光を照明し、試料の像を画像センサに結像して光学画像を取得し、光学画像を基準画像と比較してこれらの画像におけるパターンの寸法差が所定の範囲を超えたときに欠陥と判定する検査方法において、光の強度および画像センサの感度の内で少なくとも一方の時間的変動を取得し、この時間的変動とパターンの寸法差の時間的変動との関係を求めてパターンの寸法差を補正する。画像センサを試料に対し相対的に移動させることにより、試料全体の光学画像を取得しながら、所定時間毎に試料内に設けた別のパターンに画像センサを移動させて、画像センサの感度の時間的変動を求めることが好ましい。
(もっと読む)
外形検出装置および外形検出方法
【課題】検査対象物の外形の検出精度を悪化させることなく、載置台から検査対象物にかかる応力を軽減できる外形検出装置および外形検出方法を提供する。
【解決手段】太陽電池セル7を載置面3aの外周17よりも内側に載置するステージ2aと、載置面3a上に設置された金属箔テープ6と、太陽電池セル7および金属箔テープ6に照明光8を照射する同軸落射照明装置11と、照明光8の反射光9を受光するCCDカメラ12と、CCDカメラ12の出力信号から、太陽電池セルの外形を検出する画像処理装置13と、を備え、載置面3a上に設置された金属箔テープ6が、太陽電池セル7の照明光8が照射される面23と金属箔テープ6の照明光8が照射される面26とが、照明光8が出射する側から見て光学的に連続するように設置する。
(もっと読む)
ワークの組付け検査方法及び装置
【課題】 ワークを組み付ける鋳造品の肌面の位置又は寸法が経時的に変化しても、当該肌面を基準面としてワークの組付けを正しく検査できる方法及び装置を提供する。
【解決手段】 ワーク1に対して撮像手段11の視線と交わる平面上で光を照射して撮像することにより、ワーク1を組み付ける別のワークの面3aを基準面として検査対象のワーク組付けを検査する方法において、撮像手段11の視野内には、検査対象のワーク1の他に、金型で鋳造された別のワーク3の鋳造肌のみが存在する場合、その鋳造肌面を基準面として、当該別のワーク3を鋳造した金型毎に移動平均法により基準面の位置を補正し、その補正された基準面に対するワーク1の位置を検知する。
(もっと読む)
認識装置及びその制御方法、コンピュータプログラム
【課題】 照明変動が存在する環境においても対象物認識をより安定的に行うための技術を提供する。
【解決手段】 対象物の位置姿勢を認識する認識装置は、所定の照明条件で撮像装置により撮像された対象物の撮像画像を入力し、撮像画像を解析して画像中の複数の特徴部分を決定し、当該複数の特徴部分における画像の特性をそれぞれ示す複数の特徴量を抽出し、対象物上の複数の特徴部分のそれぞれにおける物理的性質を示す性質情報を入力し、撮像画像の撮像時における照明条件を示す照明情報を入力し、性質情報が示す物理的性質と、照明情報が示す照明条件とに基づいて、抽出した複数の特徴量の各々の重要度を決定し、複数の特徴量をその重要度で重み付けしたものに基づいて、対象物の位置姿勢を認識する。
(もっと読む)
真空内処理装置
【課題】トップテーブルの小型化と、トップテーブル質量の軽量化を実現しつつ、かつ長尺の反射体を必要とせず真空試料室の小型化が可能な真空内処理装置ないし荷電粒子線装置を実現する。
【解決手段】測長に使用する一対の干渉計および反射体の両者が可動となるようステージを構成し、かつステージが持つ複数の移動軸のうち上記一対の干渉計および反射体によって測長が行われる方向とは交差する移動軸と平行な方向に対して、上記一対の干渉計および反射体が互いに対向する状態を保ったまま移動できるようにステージを構成する。
(もっと読む)
形状計測装置及び方法並びにプログラム
【課題】試験体に沿って移動させる機構を不要とすること。
【解決手段】試験体の輪郭を撮像した画像の画素毎の輝度情報を抽出し、各画素を第1方向に分割して複数の小領域を定義するとともに、各小領域の輝度情報を、各画素の輝度情報および第1方向に隣接する他の画素の輝度情報に基づいて決定する小領域定義部21と、第1方向に直交する第2方向に並ぶ複数列のそれぞれの前記画素について、小領域定義部21により決定された各小領域の輝度情報を第1方向に走査して、輝度情報が所定の閾値を越える境界の小領域の位置情報を抽出する作業を実施して試験体の輪郭データを生成する輪郭データ生成部22とを備える。
(もっと読む)
表面検査方法および表面検査装置
【課題】フォーカス異常とドーズ量異常を区別して検出することが可能な表面検査方法を提供する。
【解決手段】所定の繰り返しパターンを有するウェハの表面に直線偏光を照射する照射ステップ(S104)と、直線偏光が照射されたウェハの表面からの反射光を受光する受光ステップ(S105)と、対物レンズの瞳面と共役な面において、反射光のうち直線偏光の偏光方向と垂直な偏光成分を検出する検出ステップ(S106)と、検出した偏光成分の階調値から繰り返しパターンの線幅および露光時のフォーカス状態を求める演算ステップ(S107)とを有し、演算ステップでは、瞳面において線幅との相関が高い瞳内位置での階調値から線幅を求めるとともに、フォーカス状態との相関が高い瞳内位置での階調値からフォーカス状態を求める。
(もっと読む)
面形状計測装置
【課題】面形状計測装置における計測ヘッドの小型化および軽量化に有利な技術を提供する。
【解決手段】被検面の形状を計測する面形状計測装置は、基準点から光を放射し被検面で正反射して戻ってくる被検光を検出することによって前記被検面から前記基準点への法線の方位を計測するための計測ヘッドと、前記計測ヘッドを走査する走査機構と、前記計測ヘッドを使って計測された法線の方位と前記基準点の位置とに基づいて前記被検面の形状を計算する処理部とを備え、前記処理部は、前記基準点の座標を(s,t,u)、前記被検面から前記基準点への単位法線ベクトルを(α,β,γ)、前記被検面上の点の座標を(x,y,z)、q0を定数としたときに、(x,y,z)=(s,t,u)−q(α,β,γ)q=q0+∫(αds+βdt+γdu)に基づいて前記被検面の形状を計算する。
(もっと読む)
計測方法及び装置、並びに露光方法及び装置
【課題】計測用の光学系を大型化することなく、投影光学系の光学特性を効率的にかつ高精度に計測する。
【解決手段】投影光学系PLの光学特性を計測する計測装置において、物体面の複数の計測点P(i,j)に配置される位相マーク20が形成されたレチクルマーク板RFMと、計測点P(i,j)に対応する像面上の位置に配置される周期パターン39が形成された蛍光膜35と、位相マーク20、投影光学系PL、及び周期パターン39を通過した照明光ILによって生成される検出光DLを検出面に導くFOP37と、検出光DLを検出する撮像素子38と、を備える。
(もっと読む)
ケーブル計測管理装置
【課題】ケーブル長さを正確かつ容易に計測できるようにする。
【解決手段】ケーブル計測管理装置100は、ケーブルドラム9から引き出されたケーブル2を支持するケーブル支えユニット15−1、15−2と、ケーブル支えユニット15−1、15−2により支持されたケーブルの表面に光を照射し、その反射光を撮像面に結像させることにより該ケーブル表面の画像を撮像し、連続位置で撮像された画像間の相関をもとにケーブル2の長さを計測するケーブル計測ユニット13とを具備する。
(もっと読む)
マスク形状計測方法及び装置、並びに露光方法及び装置
【課題】計測用の光学系を大型化することなく、マスクの面形状の情報を効率的にかつ高精度に計測する。
【解決手段】レチクルの形状情報を計測する計測装置において、投影光学系PLの物体面側に配置され、複数の位相マーク20が形成されたパターン面を有するレチクルRと、投影光学系PLの像面側に配置され、位相マーク20に対応して複数の周期パターン39が形成された蛍光膜35と、位相マーク20、投影光学系PL、及び周期パターン39を通過した照明光ILから生成される検出光DLを検出するFOP37及び撮像素子38と、撮像素子38の検出信号からそのパターン面の形状情報を求める演算装置とを備える。
(もっと読む)
三次元形状測定システム及び三次元形状測定方法
【課題】被測定物の三次元形状の外観を効率良く把握できる三次元形状測定システム及び三次元形状測定方法を提供する。
【解決手段】色が規則的に変化する光パルスをパルス光源56及びチャープ導入装置60により生成し、生成された前記光パルスをワーク30に照射し、該ワーク30から反射された前記光パルスの反射光像をシャッタユニット42により取得し、取得された前記反射光像の二次元情報及び色情報を用いてワーク30の三次元情報をカラー二次元検出器88により取得する。また、カラー二次元検出器88により取得されたワーク30の二次元情報に基づいて所定の箇所を選択し、該所定の箇所における三次元情報を取得する。
(もっと読む)
検査装置
【課題】管状の貫通穴、有底穴の被検査物の内周囲面、及び周囲の被検査物の外観検査を容易に行うことができる検査装置を提供することを課題としている。
【解決手段1】管状の貫通穴、有底穴の被検査物(2)の内周囲面(2a)または周囲の被検査物に光を照射する照射手段(4)と、照射された光を、内周囲面(2a)または周囲に反射拡散する反射拡散手段(6)と、内周囲面または周囲を撮像する撮像手段(7)を備え、
該撮像手段(7)の魚眼レンズまたは広角レンズ(9)同軸上前方に該反射拡散手段(6)を配置した構成とし、該撮像手段(7)により検査を行う。
(もっと読む)
位置計測装置、位置計測方法およびロボットシステム
【課題】撮像された被計測物の撮像画像がボケていても、精度良く被計測物の位置を計測できる位置計測装置を提供する。
【解決手段】被計測物Wを載置するとともに複数の反射光を放出するマーカー90を備えたステージ72と、前記マーカー90に光を照射する光照射部48と、前記被計測物Wと前記マーカー90とを異なった視線方向から撮像する複数の撮像装置20,21とを備え、前記複数の撮像装置20,21により撮像された撮像画像Bから前記マーカー90のマーカー画像100を抽出して、前記マーカー画像100から点拡散関数を求める点拡散関数算出部36と、前記点拡散関数を用いて前記撮像画像Bを画像変換して変換画像Gを生成する画像生成部37と、生成された前記変換画像Gから前記被計測物Wの位置を算出する位置算出部39と、を有することを特徴とする位置計測装置1。
(もっと読む)
表面検査装置および表面検査方法
【課題】照明光を短波長化しなくても、確実に繰り返しピッチの微細化に対応できる表面検査装置および表面検査方法を提供する。
【解決手段】被検基板20の表面に形成された繰り返しパターンを直線偏光L1により照明する手段13と、表面における直線偏光L1の振動面の方向と繰り返しパターンの繰り返し方向との成す角度を斜めに設定する手段11,12と、繰り返しパターンから正反射方向に発生した光L2のうち、直線偏光L1の振動面に垂直な偏光成分L4を抽出する手段38と、偏光成分L4の光強度に基づいて、繰り返しパターンの欠陥を検出する手段39,15とを備える。
(もっと読む)
棒鋼の真円度測定装置
【課題】オンライン搬送中の棒鋼の真円度を棒鋼全長にわたって高精度に測定できる真円度測定装置を提供する。
【解決手段】棒鋼2の搬送方向15に直交する一平面から棒鋼通材部分を除いた残りの面内に投受光式の外径計1を3台、各台による棒鋼のエッジ検出可能に配置して1組のセンサユニット5となし、該センサユニットの少なくとも4組を、異組間でエッジ検出可能位置を相異させて棒鋼搬送方向に直列に配置してなり、センサユニットごとに検出したエッジ位置3点を通る円の直径を求め、それらの最大値と最小値の差に基づいて真円度を導出する3点マイクロ法演算を、棒鋼の全長にわたって実行可能とした。
(もっと読む)
計測装置、露光装置及びデバイスの製造方法
【課題】光源からの光の光量ばらつきの影響を低減して、被計測面の表面形状を高精度に、且つ、再現性よく計測することができる技術を提供する。
【解決手段】計測面の表面形状を計測する計測装置であって、光源からの光を計測光と参照光とに分離し、計測光を被計測面の表面に入射させ、参照光を参照面に入射させる光学系と、被計測面の表面で反射した計測光の光強度と、参照面で反射した参照光の光強度と、被計測面の表面で反射した計測光と参照面で反射した参照光との干渉パターンとを検出する検出部と、検出部によって検出された干渉パターンの干渉信号に基づいて、被計測面の表面形状を算出する処理部と、を有し、処理部は、検出部によって検出された計測光の光強度、及び、参照光の光強度に基づいて、検出部によって検出された干渉パターンの干渉信号に含まれる光源からの光の光量ばらつきによる影響を低減して、被計測面の表面形状を算出する。
(もっと読む)
パターン描画装置およびパターン描画方法
【課題】描画光の波長とは異なる波長の観察光により描画用の光学系を介して対象物上のアライメントマークの位置を高精度に検出する。
【解決手段】パターン描画装置では、描画対象である基板の対象面上のアライメントマークが描画光の波長とは異なる波長の観察光により描画用の光学系を介して撮像部15にて撮像され、マーク像強度分布311として記憶部31に記憶される。また、パターン描画装置の記憶部31には、対象面の高さに点光源を配置した場合に撮像部15にて取得される点像強度分布313が記憶されている。マーク像強度分布311および点像強度分布313を用いて演算部32の像回復部321にて像回復が行われ、アライメントマークを示すマーク強度分布312が取得される。これにより、対象物上のアライメントマークの位置が高精度に検出される。
(もっと読む)
検査装置及び検査方法
【課題】検査中の高速回転のウェーハに対して、リアルタイムでその反り量を検出する。
【解決手段】被検査体1に光を照射する第一の光照射部600と、該被検査体1からの散乱光を検出する第一の検出器770と、前記被検査体1に光を照射する第二の光照射部920と、前記第二の光照射部920の光によって前記被検査体1から反射した光を検出する第二の検出器910と、前記被検査体を移動させる被検査体移動ステージ410と、前記光が照射される位置の位置座標の情報を出力する検査座標検査部450と、前記第二の検出器910からの検出信号に基づいて前記被検査体1の高さ情報を出力する昇降駆動制御回路940と、前記検査座標検査部450からの位置座標の情報と前記昇降駆動制御回路940からの高さ情報に基づいて前記被検査体1のそり量を算出するデータ処理部500を備えた。
(もっと読む)
1 - 20 / 84
[ Back to top ]