
Fターム[2F065HH01]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196)
Fターム[2F065HH01]の下位に属するFターム
拡散光 (251)
平行光 (644)
スポット光、ビーム光 (1,478)
スリット光;帯状光 (915)
グリッド光、マルチスリット光 (485)
コード化パターン光 (370)
Fターム[2F065HH01]に分類される特許
1 - 20 / 53
受光装置
【課題】ラインイメージセンサーと同等の機能を有する比較的安価な受光装置を提供する。
【解決手段】検出領域における光を検出するための受光装置であって、ホトデテクターと、ホトデテクターに入光する光を規制する開孔を有するマスクを備えた受光手段と、受光手段を検出領域に渡り移送せしめる移動手段と、受光手段の移動位置を検出する位置検出手段とを具備している。
(もっと読む)
形状認識方法、形状認識装置及び実装基板生産装置

【課題】物体が高速で移動し、物体の大きさによって必要とされる分解能が異なる場合でも、当該物体の形状認識を精度良く行うことができる形状認識方法を提供する。
【解決手段】物体の形状認識方法であって、基準光を物体上の投影領域に投影する基準光投影ステップ(S102)と、基準光が投影された投影領域のうちライン状の領域を撮像する基準光撮像ステップ(S104)と、輝度の傾斜方向に輝度が異なる輝度傾斜量を有する光である輝度傾斜光を投影領域に投影する傾斜光投影ステップ(S106)と、輝度傾斜光の投影方向と異なる撮像方向で、輝度傾斜光が投影された投影領域のうち、輝度傾斜光の輝度の傾斜方向と異なる方向に延びて配置されるライン状の領域を撮像する傾斜光撮像ステップ(S108)と、基準光撮像ステップ(S104)と傾斜光撮像ステップ(S108)での撮像結果を用いて物体の形状を認識する形状認識ステップ(S110)とを含む。
(もっと読む)
表面性状測定装置および表面性状総合評価方法
【課題】鏡面に近い面の表面性状を、それぞれの製品あるいは業界に特有の感性に近い指標に基いて定量的且つ総合的に評価できるようにする。
【解決手段】コンピュータ制御にてディスプレイ11に表示したチェックパターンを被測定面21に投影して、反射像を撮影装置12により撮影し、その画像データを収得してコンピュータ3でデータ処理するよう構成した鏡面計1を使用し、コンピュータ3に、鏡面度、鏡面度バラツキ、光沢度、シャープネス、うねり又は形状誤差、コントラストおよび白濁度といった複数の測定項目の算出ロジックを含むコンピュータソフト5を組み込んで、それら複数の測定項目を順次自動的に測定し、鏡面度を含む複数の測定項目を指標として表面性状を評価できるようにする。
(もっと読む)
溶接ビード切削幅測定方法
【課題】切削部の境界が明確に検出できる溶接ビード切削幅測定方法を提供する。
【解決手段】溶接ビード切削部11を照明装置で照射し、照射された領域をカメラ3で撮影し、その撮影画像を画像処理装置4で処理して溶接ビード切削幅を測定する溶接ビード切削幅測定方法において、前記照明装置として、溶接ビード切削部に対し左側から照射する左側照明装置1と右側から照射する右側照明装置2との2つを用い、左側からの照射と右側からの照射を交互に行う。
(もっと読む)
外観検査装置及び外観検査方法
【課題】被検査体の高さを少ない撮像回数で求める。
【解決手段】外観検査装置10は、周期的に明るさが変化する第1縞パターンを異なる複数の位相で被検査体に投射して複数の第1投影画像を撮像する。外観検査装置10は、第1縞パターンとは異なる周期で明るさが変化する第2縞パターンを異なる複数の位相で被検査体に投射して複数の第2投影画像を撮像する。外観検査装置10は、第2縞パターンに対応する被検査体の計測点の明るさ変動の位相を、第1投影画像及び第2投影画像における当該計測点の明るさと、第1縞パターン及び第2縞パターンのそれぞれに対応する明るさ変動の既知の関係とに基づいて求める。
(もっと読む)
距離画像センサ及び距離画像生成装置並びに距離画像データ取得方法及び距離画像生成方法
【課題】低価格な距離画像センサ及び距離画像生成装置並びに距離画像データ取得方法及び距離画像生成方法を提供する。
【解決手段】距離画像センサ100は、x軸、y軸、及びz軸からなる座標空間において、入射された平行光が複数の分割光に分割され、z軸に交差する所定の投光平面上に、複数の分割光が形成する複数の投光スポットによって画定される複数の線分とx軸とが成す複数の角度が所定の角度となるように、入射される平行光の進行方向を変更する回折格子が形成された回折光学素子131及び132を備える。さらに、距離画像センサ100は、複数の分割光によって対象物上に形成される複数の投光スポットで画定される複数の線分のx軸に対する傾きに基づいて、複数の投光スポットとの複数の距離を測定する(決定する)距離測定部(距離決定部)117とを備える。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供すること。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを出射する光出射部EUと、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部RUと、受光部RUの受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光出射部EUは、検出エリアRDETを設定する対象面20からの対象物OBの距離が短いと判断された場合には、第1の強度分布パターンPID1の照射光LTと第2の強度分布パターンPID2の照射光LTとを出射し、対象面20からの対象物OBの距離が長いと判断された場合には、第3の強度分布パターンPID3の照射光LTを出射する。
(もっと読む)
光学式検出装置、表示装置及び電子機器
【課題】広い範囲での対象物のセンシングが可能な光学式検出装置、表示装置及び電子機器等の提供。
【解決手段】光学式検出装置は、光源光を出射する光源部と、光源部からの光源光を曲線状の導光経路に沿って導光する曲線形状のライトガイドと、ライトガイドの外周側から出射される光源光を受け、曲線形状のライトガイドの内周側から外周側へと向かう方向に照射光の照射方向を設定する照射方向設定部と、照射光が対象物に反射されることによる反射光を受光する受光部RUと、受光部RUでの受光結果に基づいて、少なくとも対象物が位置する方向を検出する検出部50を含む。
(もっと読む)
形状計測装置およびキャリブレーション方法
【課題】計測点の位置の違いによる法線算出の誤差を可及的に小さくし、計測対象物の3次元形状を精度良く算出するための技術を提供する。
【解決手段】形状計測装置は、カメラ1で撮像を行うことにより得られた画像から、計測対象物4の表面上の複数の注目点について特徴量を算出し、記憶装置62に予め記憶されているデータを参照して特徴量の値から法線の向きを算出し、その算出結果から計測対象物4の表面の3次元形状を復元する。ここで、記憶装置62は、カメラ1の視野内に設定された複数の基準位置のそれぞれについて作成された複数のデータを記憶しており、注目点の位置に応じて参照するデータが切り替えられる。
(もっと読む)
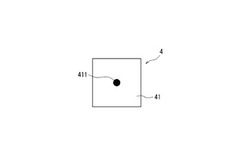
半田印刷検査装置及び半田印刷システム
【課題】半田印刷を行うにあたり、生産性の低下抑制等を図ることのできる半田印刷検査装置及び半田印刷システムを提供する。
【解決手段】半田印刷検査装置は、CCDカメラによって撮像された画像データに基づき、2つのランド2a,2bと接する半田ブリッジ3bを検出し、当該半田ブリッジ3bと接する2つのランド2a,2bの間の距離L1をブリッジ距離として算出する。そして、当該距離L1が許容範囲内であるか否かを判定し、当該距離L1が許容範囲内でないと判定した場合に、所定の重欠陥処理を実行する。
(もっと読む)
内視鏡システム、内視鏡、並びに距離・照射角度測定方法
【課題】内視鏡の挿入部の太径化を極力避けつつ、照明光の出射端から被観察部位までの距離および照明光の照射角度を測定する。
【解決手段】内視鏡10は、光源40bからの赤外光を伝搬するライトガイド22b、光源40cからの測定光を伝搬するライトガイド22c、および測定光の投影パターンを撮像するCCD24aを有する。画像処理回路34aは、CCD24aからの画像内の投影パターンを抽出し、その大きさを算出して、赤外光の出射端から被観察部位までの距離、および被観察部位への照射角度を算出する。CPU30は、算出された距離および照射角度に応じて、光源40bの動作を制御する。
(もっと読む)
基準線発生装置及び芯出し装置
【課題】ビームスポット中心の検出が容易に行え、設置作業時間を従来に比べて短縮可能な基準線発生装置、及び該基準線発生装置を備えた芯出し装置を提供する。
【解決手段】コリメートしたラゲールガウスビーム12を発生させるラゲールガウスビーム生成部101と、上記ラゲールガウスビームを所定方向へ照射するために上位機ラゲールガウスビーム生成部を吊下げる吊下げ部20と、ラゲールガウスビームの照射方向を微調整する方向調整部30と、ラゲールガウスビーム生成部の揺動を抑えるダンパ部40を備えた。
(もっと読む)
表面形状計測装置、計測装置、及び観察装置
観察装置が、第1光源分布をもつ光を計測対象物表面に照射する照明装置と、計測対象物表面を撮像する撮像部と、を有する。計測点を通る第1平面上で考えたときに、第1光源分布は、
(1)放射輝度L11(θ)が角度θに応じて連続的若しくは段階的に変化し、かつ、
(2)第1平面上で計測点から見て所定の角度θCにある点を中心とする所定の±σの範囲の局所領域において、放射輝度L11(θ)が0ではなく、0<a≦σである任意のaについて、
L11(θC−a)+L11(θC+a)=2×L11(θC)
が実質的に成り立つように、設定されている。 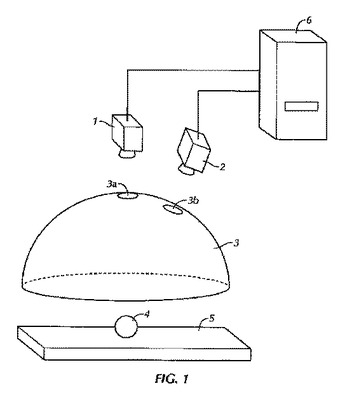 (もっと読む)
(もっと読む)
移動レンズマルチビームスキャナを備えたウェハ欠陥検出システム
【課題】大量のスループットを可能にする高速プロセスを有する光学検査システムを提供する。
【解決手段】レーザ光源101からの光ビーム151は、活性領域を有し、複数の移動レンズを活性領域に選択的に生成するようにRF入力信号に対して応答する移動レンズ音響光学デバイス104に適用される。該音響光学デバイスは、生成された移動レンズの各々の焦点のそれぞれで、光ビームを受け、複数のフライングスポットビームを生成するように動作する。該ポットビームは半導体ウェハ108を走査する。使用可能な走査データを生成するために、複数の検出器セクションを有する光検出器ユニット110が使用され、各検出器セクションは、複数の光検出器と、複数の光検出器からの入力を並列に受けるように動作する少なくとも1つのマルチステージ格納デバイスとを有する。格納デバイスの各々に格納された情報は、複数のステージから同時に連続して読み出される。
(もっと読む)
変位検出装置
【課題】被測定面の面粗度の影響による測定誤差を緩和させ、測定目的に適した精度で被測定面の変位を検出することが可能な変位検出装置を提供する。
【解決手段】変位検出装置10Aは、光源102から出射された光を第1の対物レンズ114で集光して被測定面TGに結像させる照射光学系103aと、被測定面TGで反射した光を集光して受光素子120に入射させる受光光学系103bを有した非接触センサ100Aを備え、非接触センサ100Aは、光源102と第1の対物レンズ114との間に、被測定面TGに照射される光を分光して複数点に結像させる回折格子130Aを備える。被測定面TGに複数のビームを照射することで、被測定面TGの変位を平均化して、面粗度の影響を受けにくくする。
(もっと読む)
レーザー加工装置
【課題】被加工物の上面高さ位置を検出しつつ加工用のレーザー光線の集光点位置を追随させることができるレーザー加工装置を提供する。
【解決手段】集光器7によって集光される加工用レーザー光線の集光点位置を変位せしめる集光点位置調整手段と、高さ位置検出手段8からの検出信号に基いて該集光点位置調整手段を制御する制御手段とを具備し、高さ位置検出装置8は検出用レーザー光線をのスポット形状を環状に形成する環状スポット形成手段82と、チャックテーブルに保持された被加工物の上面で反射した反射光は通過させるが被加工物の下面で反射した反射光は遮断するピンホールマスク84と、ピンホールマスク84を通過した反射光を分析し分析結果を該制御手段に送る反射光分析手段85とを具備ており、集光器7は対物レンズ72と、加工用レーザー光線は集光しないがスポット形状が環状の検出用レーザー光線は集光するウインドウレンズ73を備えている。
(もっと読む)
形状測定装置および方法、並びにプログラム
【課題】より簡単に測定精度を向上させる。
【解決手段】測定部21は、被検物12にパタン光を投光し、被検物12において反射したパタン光の観察画像を撮像する。撮像画像の撮像は、投光されるパタン光の焦点面Sと被検物12との相対的な位置を変化させながら行われる。合焦測度算出部23は、観察画像上のパタン光の像であるパタンについて、パタンの位置を示すパタン位置情報を生成するとともに、合焦測度を算出する。パタン移動角度算出部24は、各パタンの焦点面Sごとの合焦測度およびパタン位置情報に基づいて、各パタンについて、パタン光の主光線のCCD41への入射角度を、被検物12の形状の測定結果の信頼度を示すパラメータとして算出する。本発明は、3次元形状測定装置に適用することができる。
(もっと読む)
計測器
【課題】測定対象との距離の2次元分布、測定対象の傾斜角、測定対象の傾斜方向を求める。
【解決手段】計測器は、光ファイバ1と、光ファイバ1の入射軸に対して傾いた方向から走査用光を光ファイバの入射側端面に入射させる走査用レーザ3と、光ファイバ1からの光照射によって測定対象10上に現れる照射光形状を撮影するカメラ4と、カメラ4によって撮影された照射光形状の画像から、測定対象10との距離と測定対象10の傾斜角と測定対象10の傾斜方向のうち少なくとも1つを求める演算装置5とを備える。
(もっと読む)
位置検出装置、これを用いた開閉動作特性計測装置及び遮断器
【課題】 この発明は、既存の遮断器に対して容易に取り付け可能な位置検出装置を用いた開閉動作特性計測装置を提供することを目的とする。
【解決手段】 遮断器の開閉動作時に可動接触子5のストローク動作に連動して直動する主軸6に反射板13を固着し、光を円錐状に放射する光源を備える照明光学系により前記反射板13の直動可能範囲を照明し、受光光学系で前記反射板によって反射された光を受光して受光量に基づいた検出信号を出力するようにした。さらに、前記検出信号に基づいて前記反射板13の位置信号を信号処理部が出力し、前記位置信号の時系列データに基づいてモニタリング部15が開閉動作特性を計測するようにした。
(もっと読む)
光源装置
【課題】 ビームウエスト位置を検出することが可能な光源装置を提供すること。
【解決手段】 光源104からの光ビーム108は、レンズ系105を介してコーンミラー106の反射部125によって反射され、放射状に放射状光121として出力される。ビームウエスト位置算出部120は、各検出部116〜119が検出した放射状光121の断面の幅に基づいてビームウエスト122の位置を算出する。制御部102は、レンズ系位置算出部115からのレンズ系105の現在位置情報、ビームウエスト位置算出部120からのビームウエスト位置情報及び距離測定部127からの照射位置情報に基づいて、ビームウエスト122が照射点に位置するように、モータ109を制御する。スライダ112はモータ109の駆動によってレンズ系105のフォーカス位置を変更し、その結果、ビームウエスト122の位置が変更される。
(もっと読む)
1 - 20 / 53
[ Back to top ]