
Fターム[2F065HH06]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | グリッド光、マルチスリット光 (485)
Fターム[2F065HH06]に分類される特許
1 - 20 / 485
情報処理装置、情報処理装置の制御方法、およびプログラム
検査用の照明装置およびこれを備えた検査システム
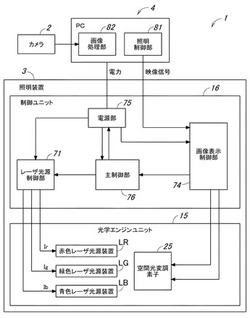
【課題】複数の検査対象部位を有する検査対象物の検査を行う場合でも、各検査対象部位に対してそれぞれ適切に照明して、検査精度を良好に維持しつつ検査時間を短縮する。
【解決手段】互いに異なる色の光を出射する複数の光源装置LG、LB、LRと、各光源装置からの光を変調する空間光変調素子25と、空間光変調素子からの光を基板Sの被検査面Saに投射する投射光学系28と、空間光変調素子を所定の映像信号にしたがって制御することにより、投射光学系からの光の投射パターンを形成する画像表示制御部74とを備え、投影パターンを形成するための映像信号は、被検査面における検査対象部位の位置情報に基づき生成され、これにより、空間光変調素子制御部が、検査対象部位に対応する画像領域を含む投射パターンを形成する構成とする。
(もっと読む)
ステレオ3次元計測装置

【課題】真に最適なパラメータ群を得ることができ、精度の高い3次元計測を可能にするステレオ3次元計測装置を提供する。
【解決手段】ステレオ3次元計測装置1は、第1,第2のカメラ21,22で計測対象物の画像を複数取得する画像取得部2と、画像取得部2から複数の画像を受けて補正するステレオ平行化部32と、ステレオ平行化部32で補正された複数の画像同士の対応点を探索して、対応点に基づいて複数の画像の評価値を算出する対応点探索部33と、画像取得部2および対応点探索部33に、予め準備しておいた複数のパラメータ群を順次入力して、上記評価値に基づいて複数のパラメータ群の中から最適なパラメータ群を選択するパラメータ選択部4とを備える。
(もっと読む)
部品実装装置および部品実装方法
【課題】物体の形状認識を正確に、かつ、高速に行うことのできる部品実装装置を提供する。
【解決手段】撮像部10と、輝度変化光を斜めから照射する照射部20と、対象物および基準点42を撮像部および照射部に対し第二方向に相対的に移動させて、対象物および基準点を撮像対象領域に対して通過させる移動部40と、基準点データと対象物データとを取得するデータ取得部と、それぞれの撮像のタイミングT1〜T4での基準点位置と基準点基位置との位置ずれを導出する位置ずれ導出部と、それぞれの撮像のタイミングの対象物基位置に対して、導出された位置ずれを加算して得られた対象物の測定部位の位置に対応する輝度値を取得する輝度値取得部と、取得された輝度値に基づいて、位相シフト法による波形を作成する波形作成部とを備える。
(もっと読む)
3次元形状データ取得装置の光学測定ヘッド
【課題】小型化の3次元形状データ取得装置の光学測定ヘッドを提供する。
【解決手段】投射光学系および撮像光学系は、プリズム型偏光ビームスプリッタ14と、ワイヤーグリッド偏光ビームスプリッタ17と、プリズム型偏光ビームスプリッタ14とワイヤーグリッド偏光ビームスプリッタ17との間に配置される結像光学系15とを有し、MEMS13と撮像手段16は、互いにプリズム型偏光ビームスプリッタ14の偏光分離面を挟み互いに交差する方向に配置され、ワイヤーグリッド偏光ビームスプリッタ17は、MEMS13から出射され結像光学系15を透過した光を透過し、ミラー18により被測定物表面に投射され被測定物表面で反射された光は、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面で結像光学系15に向けて反射させる構成とし、ワイヤーグリッド偏光ビームスプリッタ17の偏光分離面と、ミラー18の反射面とは互いに非平行とした。
(もっと読む)
レベルセンサ、基板の高さマップを決定する方法、及びリソグラフィ装置
【課題】基板表面の高さレベルを決定する際のより多くの融通性及び/又は効率的レベルセンサ技術を提供する。
【解決手段】基板W表面の高さレベルを決定するように構成されたレベルセンサであって、基板W上の反射後に測定ビームを受光するように配置された検出ユニットを備え、検出ユニットは、各検出素子が測定エリア81、82、83、84の測定サブエリア8a上に反射した測定ビームの一部を受光するように配置された検出素子のアレイを備え、それぞれの検出素子によって受光された測定ビームの部分に基づいて測定信号を提供するように構成され、処理ユニットは、測定サブエリア8aでの選択された解像度に応じて、測定サブエリア8aの高さレベルを計算し、又は複数の測定サブエリア8aの組合せの高さレベルを計算するように構成された、レベルセンサを提供する。
(もっと読む)
3次元形状測定装置
【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
部品実装基板生産装置、および、三次元形状測定装置
【課題】高精度かつ高速に測定対象物の三次元形状を測定する部品実装基板生産装置および三次元形状測定装置を提供する。
【解決手段】部品実装装置であって、撮像部であるカメラ200と、輝度変化光を発する発光部130と、測定対象物の表面における輝度変化光の輝度分布を相対的に第二方向に移動させるヘッド100と、測定対象物との間の距離が維持されるように配置された基準面部113と、基準面部113の基準面部位の少なくとも1点の輝度変化光を撮像した結果である基準面データおよび対象物データを取得するデータ取得部160と、基準面データおよび基準面部113の反射率と基準輝度値とを用いて、基準面部113の第三方向におけるずれ量を算出するずれ量算出部170と、ずれ量を用いて測定部位における光の輝度値を補正する補正部180と、補正された輝度値を用い、位相シフト法に用いられる波形を作成する波形作成部190とを備える。
(もっと読む)
部品実装基板生産装置、および、三次元形状測定装置
【課題】高精度かつ高速に測定対象物の三次元形状を測定する部品実装基板生産装置および三次元形状測定装置を提供する。
【解決手段】部品実装装置であって、撮像部であるカメラ200と、輝度変化光を発する発光部130と、測定対象物の表面における輝度変化光の輝度分布を相対的に第二方向に移動させるヘッド100と、測定対象物との間の距離が維持されるように配置された基準面部113と、基準面部の基準面部位の少なくとも3点の輝度変化光を撮像した結果である基準面データおよび対象物データを取得するデータ取得部160と、基準面部における光の輝度分布と基準輝度分布との位相差から、基準面部の所定の位置からの第三方向におけるずれ量を算出するずれ量算出部170と、ずれ量を用いて測定部位における光の輝度値を補正する補正部180と、補正された輝度値を用い、位相シフト法に用いられる波形を作成する波形作成部190とを備える。
(もっと読む)
三次元表面検査装置および三次元表面検査方法
【課題】鏡面反射が酷い計測対象物であっても、簡単な構造により低コストで高精度かつ高速に表面の凹みや大きな疵などの三次元的欠陥を検査することが可能な三次元表面検査装置の提供。
【解決手段】計測対象物Xを撮影するカメラ装置3と、曲面状に配設されて計測対象物を覆うフィルタ膜と、フィルタ膜の曲面状に沿って周期的な強度分布を持つ曲面状強度分布のパターン光を投影し、フィルタ膜を介して計測対象物に投影する曲面パターン光投影手段5と、カメラ装置3により撮影された画像に対し、曲面状強度分布を直線状強度分布に変換するデコード処理を行うことで、計測対象物の表面の三次元的欠陥を検出する欠陥検出手段13とを含む。
(もっと読む)
三次元形状計測装置、三次元形状計測装置の制御方法、およびプログラム
【課題】対象物の奥行方向に対する計測精度の低下を抑制し、計測空間全域において良好な計測精度を得る。
【解決手段】計測空間への投影動作を実行する投影部と、投影動作が実行された計測空間中の対象物を撮影する撮影部と、撮影された画像に基づいて対象物の三次元形状を計測する計測部と、を備え、計測空間は、撮影部の撮影光学系のフォーカス位置の基準となる計測基準面を含み、且つ投影部の投影範囲と撮影部の撮影範囲とに基づいて規定されており、フォーカス位置は、撮影部から観察した場合に計測基準面の位置よりも奥に設定されている。
(もっと読む)
三次元計測装置、三次元計測装置の制御方法、情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】特徴の認識性能を向上する。
【解決手段】計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影部と、パターンが投影された被写体を撮像する撮像部と、パターンにおける計測用パターンと、投影部と撮像部との位置関係に基づいて決定される複数のエピポーラ線とによって、撮像部により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化部と、所定の領域のそれぞれにおける特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識部と、特徴認識部により認識された特徴パターンに基づいて被写体の三次元形状を算出する三次元形状算出部と、を備える。
(もっと読む)
対象物の三次元座標を決定する方法および装置
【課題】対象物の三次元座標決定のための、改善された方法および装置を提供する。
【解決手段】対象物の三次元座標を決めるための方法において、プロジェクタ(3)によりパターン(6)が前記対象物(1)上に投影され、前記対象物(1)により反射された光がカメラ(4)により記録され、前記カメラ(4)によって記録された画像が測定される。前記対象物(1)の上および/または傍側にある基準点マーク(8)が、リファレンスカメラ(5)によって記録される。前記リファレンスカメラ(5)の視野(9)は、カメラ(4)の視野よりも広い。この方法を改善するために、前記リファレンスカメラ(5)は、前記カメラ(4)と、または前記プロジェクタ(3)および前記カメラ(4)を備える三次元センサ(2)と接続されている。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
基板検査装置
【課題】検査精度の向上を図ることのできる基板検査装置を提供する。
【解決手段】基板検査装置は、実装エリア内のクリームハンダ4及びレジスト膜5の表面の三次元計測を行うと共に、各クリームハンダ4の最高点の位置情報を基に算出した所定の平面を第1仮想基準面K1として設定し、さらに当該第1仮想基準面K1をベース基板2の表面2aに直交する方向に沿って所定位置まで降下させ、第2仮想基準面K2として設定する。そして、当該第2仮想基準面K2からの各クリームハンダ4の突出量を算出し、これを基に当該クリームハンダ4の印刷状態の良否を判定する。
(もっと読む)
鏡面反射面の形状測定
【課題】鏡面反射面の形状を測定する方法が提供される。
【解決手段】ターゲット面142に配置されたターゲット140の表面144に表示されたパターンを測定面122に配置された鏡面反射面124から反射させる。反射の画像が撮像面154において記録される。撮像面154に対する鏡面反射面124上の複数の点の位置が決定される。反射の画像上の複数のフィーチャ位置とパターン上の複数のフィーチャ位置との間の第1の関係が決定される。複数の点の位置を初期状態として用いて、鏡面反射面の表面プロファイル及び第1の関係を含む第2の関係から鏡面反射面の形状が決定される。
(もっと読む)
計測装置、情報処理装置、計測方法、情報処理方法、および、プログラム
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲に基づいて、以降に投影される前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
3次元形状の取得装置、処理方法およびプログラム
【課題】動きのある対象の形状を高密度かつ高フレームレートに計測可能な画像処理装置、画像処理方法およびプログラムを提供する。
【解決手段】画像処理装置10と、カメラ28、32と、プロジェクタ24と、プロジェクタ26とで、3次元空間中に存在する物体30の2次元画像を撮影し、撮影された2次元画像から物体の3次元形状を復元している。プロジェクタ24は物体30に対して横方向のパターンを照射し、プロジェクタ26は物体30に対して縦方向のパターンを照射している。そして、これらのパターンが物体30で反射したパターン光をカメラ28、32で撮影することで2次元画像を取得し、この2次元画像から画像処理装置10により3次元画像を復元している。さらに、カメラ28と32の整合性を調べることで3次元形状の精度向上が実現される。
(もっと読む)
画像処理方法および装置
【課題】高密度かつ高速に運動する物体の形状計測を可能にするための画像処理方法および装置を提供する。
【解決手段】投影装置により観測対象上に投影される、周期パターンからなる投影パターンを撮影装置により撮影し、投影パターンを含む入力画像から形状復元を行う画像処理方法において、投影装置より投影された投影パターンを撮影装置により撮影された入力画像から検出するステップと、検出された投影パターンの相対位相を検出するステップと、検出された投影パターンの絶対位相を、基準位置からの相対的な位相と、基準位置の絶対的な位相との和により表すと、複数の投影パターンの絶対位相により計算した奥行きが一致するという第1条件が検出された投影パターンの各画素について成立することに基づき基準位置の絶対的な位相を計算するステップとを備える。
(もっと読む)
1 - 20 / 485
[ Back to top ]