
Fターム[2F065HH07]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 強度分布 (4,196) | コード化パターン光 (370)
Fターム[2F065HH07]に分類される特許
1 - 20 / 370
情報処理装置、情報処理装置の制御方法、およびプログラム
情報処理装置、情報処理装置の制御方法、およびプログラム
3D表面形状測定と組み合わされた位相ステッピングシェアログラフィーのための低コヒーレント干渉計システム
投影装置、3次元計測装置並びにその制御方法およびプログラム
検査用の照明装置およびこれを備えた検査システム
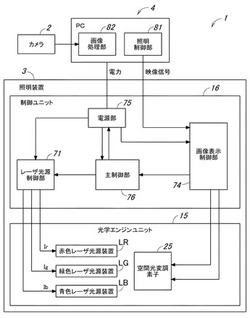
【課題】複数の検査対象部位を有する検査対象物の検査を行う場合でも、各検査対象部位に対してそれぞれ適切に照明して、検査精度を良好に維持しつつ検査時間を短縮する。
【解決手段】互いに異なる色の光を出射する複数の光源装置LG、LB、LRと、各光源装置からの光を変調する空間光変調素子25と、空間光変調素子からの光を基板Sの被検査面Saに投射する投射光学系28と、空間光変調素子を所定の映像信号にしたがって制御することにより、投射光学系からの光の投射パターンを形成する画像表示制御部74とを備え、投影パターンを形成するための映像信号は、被検査面における検査対象部位の位置情報に基づき生成され、これにより、空間光変調素子制御部が、検査対象部位に対応する画像領域を含む投射パターンを形成する構成とする。
(もっと読む)
表面欠陥検査方法及び表面欠陥検査装置

【課題】 表面欠陥検査方法及び表面欠陥検査装置に関し、欠陥検査の検知精度の向上を図るために位相シフトを用いつつ検査時間を低減する。
【解決手段】 互いに異なった複数の波長をそれぞれ独立に変調した明暗パターンをパターン平面上で互いに変調させて合成照明パターンを合成し、前記合成した合成照明パターンを検査対象物に照射し、前記検査対象物からの前記合成照明パターンの反射パターンを撮像して波長毎の画像を一括して取得し、前記撮像した画像を波長毎に分解して前記検査対象物の表面の凹凸欠陥を判別する。
(もっと読む)
ステレオ3次元計測装置
【課題】真に最適なパラメータ群を得ることができ、精度の高い3次元計測を可能にするステレオ3次元計測装置を提供する。
【解決手段】ステレオ3次元計測装置1は、第1,第2のカメラ21,22で計測対象物の画像を複数取得する画像取得部2と、画像取得部2から複数の画像を受けて補正するステレオ平行化部32と、ステレオ平行化部32で補正された複数の画像同士の対応点を探索して、対応点に基づいて複数の画像の評価値を算出する対応点探索部33と、画像取得部2および対応点探索部33に、予め準備しておいた複数のパラメータ群を順次入力して、上記評価値に基づいて複数のパラメータ群の中から最適なパラメータ群を選択するパラメータ選択部4とを備える。
(もっと読む)
物品の3次元位置姿勢の認識装置及び認識方法
【課題】製造現場で使われる汎用的な組み込み装置でも実施できるような、少ない計算コストで物品の3次元位置姿勢を認識できる認識装置及び認識方法の提供。
【解決手段】カメラ20で複数の物品22がバラ積みされた領域全体の2次元画像を取得し、レンジセンサ18でカメラ20と略同じ領域の3次元情報を取得する。取得した3次元情報から、取り出すべき物品が存在するであろう空間を対象空間として大まかに限定し、該対象空間に基づいて2次元画像処理で物品を探索するための探索条件を設定し、該探索条件に基づいて物品の画像上での2次元位置情報を取得する。次に該2次元位置情報を用いて、物品の3次元位置姿勢の認識に使用する3次元点データを選定し、カメラ20の焦点から該物品に向かう3次元空間上の視線を計算し、該3次元点データと視線とに基づいて物品の3次元の位置姿勢を計算する。
(もっと読む)
三次元計測装置、三次元計測装置の制御方法、情報処理装置、情報処理装置の制御方法、およびプログラム
【課題】特徴の認識性能を向上する。
【解決手段】計測用パターンと特徴パターンとを有するパターンを被写体へ投影する投影部と、パターンが投影された被写体を撮像する撮像部と、パターンにおける計測用パターンと、投影部と撮像部との位置関係に基づいて決定される複数のエピポーラ線とによって、撮像部により撮像された画像を複数の領域に分割して、分割された複数の領域のうち所定の領域をグループ化するグループ化部と、所定の領域のそれぞれにおける特徴パターンの差異に基づいて当該特徴パターンを認識する特徴認識部と、特徴認識部により認識された特徴パターンに基づいて被写体の三次元形状を算出する三次元形状算出部と、を備える。
(もっと読む)
三次元形状計測装置、三次元形状計測装置の制御方法、およびプログラム
【課題】対象物の奥行方向に対する計測精度の低下を抑制し、計測空間全域において良好な計測精度を得る。
【解決手段】計測空間への投影動作を実行する投影部と、投影動作が実行された計測空間中の対象物を撮影する撮影部と、撮影された画像に基づいて対象物の三次元形状を計測する計測部と、を備え、計測空間は、撮影部の撮影光学系のフォーカス位置の基準となる計測基準面を含み、且つ投影部の投影範囲と撮影部の撮影範囲とに基づいて規定されており、フォーカス位置は、撮影部から観察した場合に計測基準面の位置よりも奥に設定されている。
(もっと読む)
基板検査装置及び検査方法
【課題】基板検査装置及び検査方法を提供すること。
【解決手段】検査方法は、測定対象物を撮影して測定対象物のピクセル別にイメージデータを取得し、測定対象物のピクセル別に高さデータを取得し、測定対象物のピクセル別にビジビリティデータを取得し、取得されたイメージデータと、ピクセル別の高さデータ、及びビジビリティデータのうちの少なくとも1つとを乗算して結果値を算出し、算出された結果値を利用してターミナル領域を設定すること、を含む。よって、より正確にターミナル領域を判別することができる。
(もっと読む)
投影制御装置及び投影制御方法
【課題】投影装置の動作をフレームごとに制御することを可能にする。
【解決手段】投影装置を制御するための投影制御装置は、複数の色成分で構成された映像信号を受信し、受信した映像信号の各フレームについて特定の色成分の情報を制御情報として抽出し、抽出された制御情報に基づいて投影装置の動作を制御するための投影制御情報をフレームごとに生成し、生成した投影制御情報を投影装置に供給する。
(もっと読む)
鏡面反射面の形状測定
【課題】鏡面反射面の形状を測定する方法が提供される。
【解決手段】ターゲット面142に配置されたターゲット140の表面144に表示されたパターンを測定面122に配置された鏡面反射面124から反射させる。反射の画像が撮像面154において記録される。撮像面154に対する鏡面反射面124上の複数の点の位置が決定される。反射の画像上の複数のフィーチャ位置とパターン上の複数のフィーチャ位置との間の第1の関係が決定される。複数の点の位置を初期状態として用いて、鏡面反射面の表面プロファイル及び第1の関係を含む第2の関係から鏡面反射面の形状が決定される。
(もっと読む)
計測装置、情報処理装置、計測方法、情報処理方法、および、プログラム
【課題】 三次元位置計測において、投影パターンのパターン形状を適切に設定することを目的とする。
【解決手段】 計測対象に対してパターン光を投影する投影手段と、前記パターン光が投影された前記計測対象を撮影し、前記計測対象の撮影画像を取得する撮影手段と、前記撮影画像と、前記投影手段の位置および姿勢と、前記撮影手段の位置および姿勢とに基づいて、前記計測対象の位置および/または姿勢を計測する計測手段と、前記計測対象の位置および/または姿勢の変動範囲に基づいて、以降に投影される前記パターン光のパターン形状を変更する変更手段と、を有することを特徴とする。
(もっと読む)
画像処理方法および装置
【課題】高密度かつ高速に運動する物体の形状計測を可能にするための画像処理方法および装置を提供する。
【解決手段】投影装置により観測対象上に投影される、周期パターンからなる投影パターンを撮影装置により撮影し、投影パターンを含む入力画像から形状復元を行う画像処理方法において、投影装置より投影された投影パターンを撮影装置により撮影された入力画像から検出するステップと、検出された投影パターンの相対位相を検出するステップと、検出された投影パターンの絶対位相を、基準位置からの相対的な位相と、基準位置の絶対的な位相との和により表すと、複数の投影パターンの絶対位相により計算した奥行きが一致するという第1条件が検出された投影パターンの各画素について成立することに基づき基準位置の絶対的な位相を計算するステップとを備える。
(もっと読む)
情報処理装置及び情報処理方法
【課題】 計測対象物体からの反射光を用いて3次元計測を行う手法において、計測の誤差に起因する、計測対象物体の3次元位置の取得精度の低下を防止することを目的とする。
【解決手段】 構造化光が投影された計測対象物体からの反射光の情報と、前記構造化光の光源の位置と、前記反射光を受光して前記反射光の情報を取得する受光部の位置とを用いた三角法により、前記計測対象物体の表面の複数の位置を取得する第一の取得手段と、前記複数の位置に基づき、前記計測対象物体の表面の位置および向きを取得する第二の取得手段と、前記複数の位置を取得する際の計測の誤差に関する情報と、前記計測対象物体の表面の位置および向きとに基づき、前記複数の位置の少なくとも一つを補正する補正手段と、を有することを特徴とする。
(もっと読む)
撮像装置、撮像装置の制御方法、三次元計測装置、およびプログラム
【課題】サンプリングピッチを細かくすることなく、少ないサンプリング数でより高精度に交点を算出する。
【解決手段】明部および暗部を有する第1のパターンまたは第2のパターンを投影パターンとして対象物へ投影する投影部と、投影パターンが投影された対象物を撮像素子に輝度分布として結像させる撮像部と、を備え、輝度分布は明部に対応する第1の輝度値と暗部に対応する第2の輝度値とを有し、第1のパターンおよび第2のパターンは明部の位置または暗部の位置が重複する重複部を有し、第1のパターンに対応する第1の輝度分布および第2のパターンに対応する第2の輝度分布は重複部で同輝度値となる交点を有し、交点の輝度値は第1の輝度値および第2の輝度値の平均値と所定値だけ異なる。
(もっと読む)
三次元計測装置、三次元計測装置の制御方法、およびプログラム
【課題】パターンの1周期を撮像素子の少ない画素数でサンプリングした上で交点間隔の誤差を低減し、三次元計測の精度を向上する。
【解決手段】明部と暗部とが交互に配置された第1の明暗パターン光が投影された対象物を撮像して取得される第1の画像の階調値と、当該第1の明暗パターン光の位相をずらした第2の明暗パターン光が投影された当該対象物を撮像して取得される第2の画像の階調値とを用いて、当該第1の明暗パターン光と当該第2の明暗パターン光との複数の交点位置を検出する検出部と、検出部により検出された複数の交点位置に含まれる第1の交点位置と当該第1の交点位置と隣接する第2の交点位置とに基づいて、第3の位置を算出して、当該第3の位置の間隔に基づいて対象物の三次元位置を計測する計測部と、を備える。
(もっと読む)
三次元計測装置
【課題】三次元計測を行うにあたり、計測効率の低下を抑制しつつ、計測精度の向上等を図ることのできる三次元計測装置を提供する。
【解決手段】基板検査装置10は、プリント基板1を搬送するコンベア13と、プリント基板1の表面に対し斜め上方から所定の光を照射する照明装置14と、当該光の照射されたプリント基板1を撮像するカメラ15とを備えている。照明装置14は、第1照明14A〜第8照明14Hを備えている。そして、三次元計測を目的として第1輝度のパターン光の下で複数回の撮像が行われる合間に、三次元計測を目的とした第2輝度のパターン光の下での複数回の撮像や、輝度画像データを取得することを目的とした第1輝度及び第2輝度の各色成分の均一光の下での撮像が行われる。
(もっと読む)
検出対象物の中心位置を算出する方法、装置およびプログラム
【課題】複数の検出対象物が任意の方向を向いて配置されている場合であっても、それぞれの検出対象物の中心位置を算出することができる方法、装置およびプログラムを提供する。
【解決手段】既知の半径を有する円筒または球を少なくとも一部に含む検出対象物の中心位置を算出する方法を提供する。当該方法は、少なくとも1つの検出対象物を撮像した入力画像を取得するステップと、検出対象物の形状に相当する領域を入力画像から抽出するステップと、抽出された領域についての高さ情報を取得するステップと、抽出された領域内において明るさが極大となる部分を特定し、当該部分の法線方向を決定するステップと、決定した法線方向と、既知の半径と、明るさが極大となる部分の位置と、対応する高さ情報とから、検出対象物の中心位置を決定するステップとを含む。
(もっと読む)
1 - 20 / 370
[ Back to top ]