
Fターム[2F065HH11]の内容
光学的手段による測長装置 (194,290) | 入射光 (9,091) | 入射方向 (4,392)
Fターム[2F065HH11]の下位に属するFターム
Fターム[2F065HH11]に分類される特許
1 - 20 / 34
マクロ検査装置
【課題】被検査物の表面の凹凸パターンのサイズ変動を検査するマクロ検査装置を提供する。
【解決手段】被検査物2の表面の凹凸パターンのサイズ変動を検査するマクロ検査装置100である。マクロ検査装置100は、被検査物2を乗せるためのステージ1と、被検査物2の表面に対して所定の角度方向から被検査物2側に光を照射する拡散光源5と、被検査物2の表面からの反射光を受光可能なラインセンサ9と、被検査物2とラインセンサ9との間に設けられ、反射光のうち拡散光源5のエッジ部からの光束に起因する反射光束が、ラインセンサ9の両端の少なくとも一方に設けられた所定領域でのみ受光されるように、反射光をラインセンサ9に導くための光学系と、を備える。
(もっと読む)
光検出装置および電子機器

【課題】単一の受光素子を用いた簡単な構成による小型かつ低コストな近接/方向センサとして、対象物体の近接/非近接状態の変化とそれに直交する移動方向を、同時に最も効率よく検出して人体の動作に十分に追随させるための光検出装置を提供する。
【解決手段】受光素子200は、反射光103が直接入射する第1のウェル301と、第1のウェル301を挟んで対向し、かつ反射光103は遮光されて入射しない第2のウェル302及び第3のウェル303とを備えている。受光素子200による受信信号は、第1のウェル301の出力と第2のウェル302の出力との和、及び、第1のウェル301の出力と第3のウェル303との出力の和を、時間軸上で交互に出力する。この受信信号に基づいて、光検出装置天面の法線方向である第1の軸方向に沿う対象物体の近接状態と、前記対象物体の近接状態が変化した際の移動方向とが判定される。
(もっと読む)
被計測体の表面異常識別装置
【課題】高温の被計測体に発生する酸化スケール等の表面異常を精度良く識別することができる被計測体の表面異常識別装置を提供する。
【解決手段】高温の被計測体5から得られる輻射光を輻射光撮像部18により、被計測体5が一定角度回転される毎に撮像して得た複数の輻射光画像を合成して、合成輻射光画像を作成する画像合成部10と、前記合成輻射光画像から所定領域を抽出して、撮像中の被計測体5の温度低下に基づく前記所定領域の画像の輝度変化を補正する第1輝度補正部12と、前記補正した所定領域の画像から所定暗部を検出し、該所定領域の画像の暗部を前記被計測体の表面異常と判定する異常判定部14と、を備える被計測体の表面異常識別装置1を用いる。
(もっと読む)
工具位置測定装置
【課題】微小な回転工具の刃先位置を、XYZ軸の3方向について高分解能かつ高精度に検出可能な工具位置測定装置を提供する。
【解決手段】回転工具12の刃先12aにZ軸方向の光を入射させ、その反射光を受光する第一光学装置22を備える。刃先12aをZ軸方向から見た底刃画像を撮像する第一撮像装置24と、底刃画像を基に、回転工具12の位置を測定する処理装置を備える。第一光学装置22は、X軸方向に照射光を発する第一光源30を有する。照射光をZ軸方向に偏向して刃先12aに入射させ、刃先12aからの反射光を逆向きのX軸方向に偏向する第一偏向ミラー38を有する。刃先12aと第一偏向ミラー38との間に、入射光及び反射光が通過する第一対物レンズ20を有する。第一撮像装置24は、第一偏向ミラー38によって偏向された刃先12aからの反射光による底刃画像を撮像する。
(もっと読む)
透明物品の検査装置及び検査方法
【課題】円筒状または円柱状のガラス物品W等の透明物品の欠点を確実かつ高能率に検査することができる透明物品の検査装置と検査方法を提供すること。
【解決手段】ガラス物品Wを搬送する搬送手段1の搬送路11を、回転体12、13間を循環走行する一対の平行な無端搬送体14から構成し、一対の無端搬送体14の対向側縁部141同士の間に搬送隙間15を形成した。これら左右一対の対向側縁部141によってガラス物品Wの外周面を左右から支えて安定に搬送しながら、この搬送路11を挟んで上下左右に配設した複数の照明手段(2A〜2D)及び撮像手段(3A〜3D)により、搬送隙間15を光路としてガラス物品Wを撮像するようにした。
(もっと読む)
表面凸凹検出装置および表面凸凹検出方法
【課題】効率的に被検査物の表面の凹凸を検出する表面凹凸検査装置を提供すること。
【解決手段】ラインセンサ2、ラインセンサと並行で、複数位相の明暗パターンを生成する照明装置1、ラインセンサで撮像された線状の撮像データをフレーム画像に合成する演算装置5を具備し、同一の撮像対象ラインに対し、照射角度の異なる複数位相の明暗パターンが照明されるように構成される。ラインセンサ2は、同一の撮像対象ラインで反射された照射角度の異なる複数位相の明暗パターンからの光を、該明暗パターンの切り替えと同期して複数の線状の撮像データとして取得する。演算装置5は、ラインセンサで取得された線状の撮像データをフレーム画像に合成する際に、複数位相のうち同一の位相の撮像データ同士を合成することにより位相毎の複数の面画像を生成するとともに、生成した複数の面画像に対して同一の画像処理を施す。
(もっと読む)
エアギャップ測定装置
【課題】測定ポイントの探索を短時間で行うことができ、尚かつ、エアギャップ画像と透明部材画像との間のコントラストを改善して、エアギャップを高精度で測定できるエアギャップ測定装置を提供する。
【解決手段】エアギャップ測定装置は、測定対象物OBJが、対向配置された一対の透明部材の間のエアギャップであって、前記一対の透明部材を前記エアギャップの厚さ方向に交差する方向から拡散光で照明するための面発光光源10と、面発光光源10と透明部材との間に設けられ、開口形状が可変である絞り部材20と、透明部材およびエアギャップの透過画像を撮像するための撮像ユニット30と、同軸落射照明用光源50などで構成され、同軸落射照明用光源50と撮像ユニット30の結像光学系31とによる同軸落射照明光が、その中心部に非照明部が存在するスポット光である。
(もっと読む)
管端開先加工部の検査方法及び装置
【課題】 管端部の開先加工部の表面健全性を速やかに検査する。
【解決手段】 暗空間形成容器内側の暗空間に、検査対象管1の管端部に設けた開先加工部2を配置し、照明装置で照明された周方向の一部におけるルート面3と開先面4のR部分4a及び斜面部分4bを、撮影装置で一緒に撮影する。得られた画像9上の開先加工部2のルート面3と開先面4のR部分4aと斜面部分4bに対応する個所に、それぞれの明るさの差を基に、ルート面用計測領域10aと開先面R部分用計測領域10bと、開先面斜面部分用計測領域10cを設定する。各計測領域10a,10b,10cについて個別のコントラスト変換を行い、個々の濃淡変化、色の濃さが、予め正常な表面健全性を備えた開先加工部を有する管について同処理を実施したときの濃淡の変化、色の濃さの基準値に比して或るしきい値を越えると、開先加工部2における表面健全性に不良があると判定させる。
(もっと読む)
位置検出システム、方法、記憶媒体、及びプログラム
【課題】投射光領域の輪郭が不明瞭な場合でも、移動体の正確な位置を検出する。
【解決手段】移動体の位置を検出する位置検出システムであって、天井面を撮影した画像から前記移動体に装着されかつ鉛直制御された光源から該天井面へ投射された投射光の画像領域を抽出する抽出手段と、前記投射光の画像領域の重心位置を算出する算出手段と、前記重心位置を床面の前記移動体の位置へと変換する位置変換手段とにより達成される。
(もっと読む)
認識装置及びその制御方法、コンピュータプログラム
【課題】 照明変動が存在する環境においても対象物認識をより安定的に行うための技術を提供する。
【解決手段】 対象物の位置姿勢を認識する認識装置は、所定の照明条件で撮像装置により撮像された対象物の撮像画像を入力し、撮像画像を解析して画像中の複数の特徴部分を決定し、当該複数の特徴部分における画像の特性をそれぞれ示す複数の特徴量を抽出し、対象物上の複数の特徴部分のそれぞれにおける物理的性質を示す性質情報を入力し、撮像画像の撮像時における照明条件を示す照明情報を入力し、性質情報が示す物理的性質と、照明情報が示す照明条件とに基づいて、抽出した複数の特徴量の各々の重要度を決定し、複数の特徴量をその重要度で重み付けしたものに基づいて、対象物の位置姿勢を認識する。
(もっと読む)
形状測定装置、形状測定方法
【課題】半導体ウェーハ等の薄片試料のエッジプロファイルの測定に適した形状測定装置及びその方法を提供する。
【解決手段】LED駆動回路11により、一の平面内の複数の位置各々に配置された複数のLED12を順次切り替えて点滅させることにより、ウェーハ1の端面であり、鏡面あるいは光沢のある面である測定部位Pに対し、順次異なる照射角度で光を照射し、その照射ごとに、計算機30により、測定部位Pからの反射光の輝度分布を表す画像データを、カメラ20を通じて取得し、さらに、計算機30により、各LED12に対応した画像データと光の照射角度とに基づいて、反射光の輝度がピークとなるときの光の照射角度を推定することにより、測定部位Pの表面角度の分布及びエッジプロファイルを演算する。
(もっと読む)
連続部品の検査方法、連続部品の検査プログラムおよび連続部品の検査装置
【課題】プレス加工等により所定の繰り返しピッチで複数個が帯状の材料に加工された連続部品に対する検査技術を提供する。
【解決手段】連続部品の検査方法は、正常品である連続部品の画像を取得する画像取得手順S1と、その画像から垂直エッジを検出してエッジピッチを求め、エッジピッチのヒストグラムを作成するエッジピッチヒストグラム作成手順S6と、連続部品の繰り返しピッチである基準ピッチを求める基準ピッチ算出手順S7と、連続部品が存在する画像領域の上限と下限を求め、その間の領域で基準ピッチ内に単一の部品が納まる画像領域を切り出すテンプレート領域抽出手順S8と、切り出された画像領域をテンプレートとして登録するテンプレート登録手順S9と、検査対象の連続部品の画像を取得し、テンプレートと基準ピッチとを用いて良否を判定する検査手順とを備える。
(もっと読む)
仮想ゴルフシミュレータ及びそれに備えられるセンシング装置と仮想ゴルフシミュレータのセンシング方法
【課題】仮想ゴルフシミュレータでゴルフボールの位置、打撃後のゴルフボールの角度、速度、方向及びスピン、及び打撃後のゴルフクラブの軌道などを感知して、最大限に正確にゴルフボールの飛距離及び球質などを具現可能にする仮想ゴルフシミュレータ及びそれに設けられるセンシング装置と仮想ゴルフシミュレータのセンシング方法を提供する。
【解決手段】ゴルフシミュレータのセンシング装置は、ゴルフボールを打撃するためのスイングマットの前方に設けられて、打撃されたゴルフボールの速度、水平方向角度及びスピンのうち少なくとも一つを測定する第1センシング装置500と、スイングマットの一側面に設けられて、スイングマット上に置かれたゴルフボールの位置を感知し、打撃されたゴルフボールの速度、垂直方向角度及びスピンのうち少なくとも一つを測定する第2センシング装置400とを含む。
(もっと読む)
車両タイヤのトレッド深さを測定する方法及びその装置
タイヤを、測定ステーション上を回転通過させるか或いは測定ステーション上に置く;該タイヤのトレッドを、少なくとも1つの測定ライン上で、タイヤ回転方向に対して横断する方向で光学的に感知する;この際に、光源から広がる扇状光線が前記タイヤ表面で反射され、反射した扇状光線の信号がセンサにより記録される、そして、前記反射した扇状光線の前記信号を三角測量法により評価する、タイヤが車両に装着された状態で車両タイヤのトレッド深さを決定する方法において、前記信号が前記タイヤ表面に対して非直交的に記録される方法。 (もっと読む)
形状測定装置および形状測定方法
【課題】顕微鏡の被写界深度を大幅に超えた立体形状を持つ被測定物を、被測定物や顕微鏡等を移動させることなく、短時間で効率的に、高精度な形状測定を行うことができる形状測定装置および形状測定方法を提供する。
【解決手段】本発明に係る形状測定装置1は、被測定物100に向けて平行光Rを照射する照明装置30と、被測定物100を挟んで照明装置30と対向する位置に、前記平行光の光軸と自身の光軸が一致するように配置される被写界深度の大きな顕微鏡40と、顕微鏡40により拡大された被測定物100の像を、0.2μm乃至2μmの分解能で撮像するカメラ50と、平行光Rが被測定物100の測定部分の外周形状を映し出すように平行光R内に被測定物100の測定部分を配置する保持装置20と、を備える。
(もっと読む)
イメージングシステム及び方法
物体の表面法線の勾配を決定する装置であって、方法は、各画像が異なる方向からの照明のもとで取得された、前記物体の3つの2D画像のデータを受信する手段と、画素からの2つの画像から得られるデータのみがあるように、前記画像のどの画素が陰になっているかを定める手段と、前記2つの画像に関して利用可能な前記データを使用して、陰影画素の表面法線の勾配に関する可能な解の範囲を決定する手段と、前記物体の領域上の勾配場の積分可能性を拘束として使用して、コスト関数を最小化することにより、前記勾配に関する解を選定する手段と、を具備する。
【選定図】図1 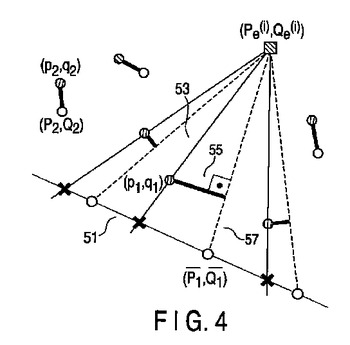 (もっと読む)
(もっと読む)
基板のモデルを評価する方法、検査装置及びリソグラフィ装置
【課題】
【解決手段】基板のモデルを評価する方法が提供される。スキャトロメトリ測定が、第1の波長で放射を用いて行われる。次に、放射の波長が変更され、他のスキャトロメトリ測定が行われる。スキャトロメトリ測定値が、波長のある範囲内で同じである場合には、モデルは十分に正確である。しかし、スキャトロメトリ測定値が、波長の変化につれて変化する場合には、基板のモデルは十分には正確でない。
(もっと読む)
測定装置
【課題】
従来技術によるモアレ法は、モアレパターンから等高線を求めるために複雑な演算を行う必要があった。さらに、高低差のある物体の等高線を一度に求めるため、物体の高低差によって誤差が生じるという問題があった。
【解決手段】
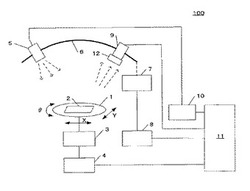
本発明に係る測定装置は、第1の方向に光を送光する送光部と、前記第1の方向と略直交する軸を中心に被測定物と前記送光部とを相対的に回転させる回転部と、前記被測定物で反射した前記光を検出する検出部と、前記検出部の検出結果に基づいて、前記被測定物の形状を測定する形状測定部とを設けた。
(もっと読む)
測定装置および測定方法
【課題】
従来技術によるモアレ法は、モアレパターンから等高線を求めるために複雑な演算を行う必要があった。さらに、高低差のある物体の等高線を一度に求めるため、物体の高低差によって誤差が生じるという問題があった。
【解決手段】
本発明に係る測定装置は、第1の方向に光を送光する送光部と、前記第1の方向と略直交する前記被測定物の方向に前記光の方向を変換する変換部と、前記変換部で方向が変換された光のうち前記被測定物で反射した光を検出する検出部と、前記検出部の検出結果に基づいて、前記被測定物の形状を測定する形状測定部とを設けた。
(もっと読む)
目標物の位置の非接触式干渉計型検出のための位置検出システム及びこれを備えた走査システム
本発明は、目標物位置の非接触式干渉計型検出のための位置検出システムに関する。目標物ユニット(11)は、湾曲した光波面(30)を備えた参照光線(25)を送信するよう構成された参照光送信器(23)を有する。目標物ユニットは、複数の検出器画素(31)を備えた少なくとも1つの検出器アレイ(14)を有しており、参照光送信器(23)の参照光線(25)が検出器アレイに当たるように、検出器アレイは目標物ユニット(11)に固定されている。 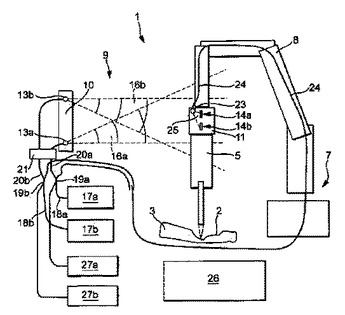 (もっと読む)
(もっと読む)
1 - 20 / 34
[ Back to top ]