
Fターム[2F065JJ05]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 複数の受光部 (2,728)
Fターム[2F065JJ05]に分類される特許
1 - 20 / 2,728
三次元座標測定装置、三次元座標測定方法、及びプログラム
薄膜形成装置及び薄膜形成方法
レーザトラッカー
環境認識装置
車体寸法計測装置及び車体寸法計測方法
電子機器
下水圧送管路におけるピグ位置検出装置
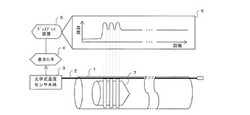
【課題】下水圧送管路内に走行させて堆積物等を除去する洗浄用ピグの走行位置を検出する場合、管路途中でピグが停止した場合は、その位置を正確に検出することが出来なかった。
【解決手段】下水圧送管路1の内壁面に、管路内を走行する洗浄用ピグ7が接触するようにセンサ用光ファイバ2を配設し、光学式温度センサ本体3からセンサ用光ファイバ2にパルス光を入射させ、センサ用光ファイバから出射される後方散乱光を測定系に導いてセンサ用光ファイバの長手方向の温度を測定し、ディスプレイ装置5に測定した温度情報を監視画面6として表示する。走行する洗浄用ピグ7がセンサ用光ファイバ2に接触して生じる摩擦により発生した熱の温度を光学式温度センサ本体で測定することにより、洗浄用ピグ7の走行位置を監視する。
(もっと読む)
車載カメラシステム及びその較正方法、及びその較正プログラム

【課題】撮像部の 内部パラメータと外部パラメータを容易に較正できる車載カメラシステムの較正方法を得ること。
【解決手段】車載カメラシステム1の較正方法は、撮像部307〜310により撮像された画像から予め設定された直線部分を有する認識対象物を認識し、画像から認識対象物の特徴点を抽出し、その特徴点を仮想球面に投影して仮想球面601に形成された特徴点列の形状に基づいて撮像部307〜310の内部パラメータを推定し、推定した内部パラメータを較正するとともに、特徴点に基づいて画像の俯瞰視点を算出し、その算出した俯瞰視点に基づいて撮像部307〜310の外部パラメータを推定し、その推定した外部パラメータを較正することを特徴としている。
(もっと読む)
撮像装置およびアライメント装置
【課題】透明な平板状の物体の一方主面を、他方主面側から該物体を介して撮像する技術において、特に対象物が薄い場合でも支障なく撮像を行うことのできる技術を提供する。
【解決手段】ブランケットBLを吸着保持する吸着ステージ51の上面510と、アライメントパターンAP2を下方から撮像するための石英窓52aの上面520とを同一平面とせず、石英窓52aの上面520を下方に後退させて配置する。ブランケットBLと石英窓52aとが部分的に接触することにより生じる干渉縞が画像に写り込むのを防止することができる。
(もっと読む)
厚み計測装置および厚み計測方法
【課題】一方主面に薄膜が形成された透明で平板状の基材の厚みを計測する厚み計測装置および厚み計測方法において、薄膜の光学的特性に影響されることなく、基材の厚みを高精度に計測する。
【解決手段】対物レンズ455の合焦位置FPを、ブランケットBLの下面BLtよりも下方位置Zminから上面BLfよりも上方位置Zmaxまで、一定の刻みΔZでステップ的に上昇させながらその都度撮像を行う。撮像位置と受光強度との関係において、ブランケットBLの上面BLfおよび下面BLtに対応するピーク間の距離から、ブランケットBLの厚みDzを求める。
(もっと読む)
ステレオ3次元計測装置
【課題】真に最適なパラメータ群を得ることができ、精度の高い3次元計測を可能にするステレオ3次元計測装置を提供する。
【解決手段】ステレオ3次元計測装置1は、第1,第2のカメラ21,22で計測対象物の画像を複数取得する画像取得部2と、画像取得部2から複数の画像を受けて補正するステレオ平行化部32と、ステレオ平行化部32で補正された複数の画像同士の対応点を探索して、対応点に基づいて複数の画像の評価値を算出する対応点探索部33と、画像取得部2および対応点探索部33に、予め準備しておいた複数のパラメータ群を順次入力して、上記評価値に基づいて複数のパラメータ群の中から最適なパラメータ群を選択するパラメータ選択部4とを備える。
(もっと読む)
対象検出装置および対象検出方法
【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
ステレオ3次元計測装置
【課題】回路規模および演算時間の増大を招くことなくキャリブレーションずれを再補正する。
【解決手段】キャリブレーションによって補正された左右のカメラステレオ平行化後画像間のずれ量を、キャリブレーションずれ再補正部15を含む対応点探索部9による対応点の探索処理中において、キャリブレーションずれ再補正部15によるキャリブレーションずれ再補正処理で得られるデータを用いて再補正する。こうして、距離計測装置1における内部ハードウェアの回路規模および演算時間を増大させることなく計測精度を高めることができる。また、上記右カメラステレオ平行化後画像を上下にずらして、左右のカメラステレオ平行化後画像の上下方向のずれを再補正する。こうして、問題になり易い上下方向のキャリブレーションずれを低減することができる。その際に、対応点の探索を行う際の右カメラステレオ平行化後画像の最適位置を確実に見出すことができる。
(もっと読む)
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム
【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
部品実装装置および部品実装方法
【課題】物体の形状認識を正確に、かつ、高速に行うことのできる部品実装装置を提供する。
【解決手段】撮像部10と、輝度変化光を斜めから照射する照射部20と、対象物および基準点42を撮像部および照射部に対し第二方向に相対的に移動させて、対象物および基準点を撮像対象領域に対して通過させる移動部40と、基準点データと対象物データとを取得するデータ取得部と、それぞれの撮像のタイミングT1〜T4での基準点位置と基準点基位置との位置ずれを導出する位置ずれ導出部と、それぞれの撮像のタイミングの対象物基位置に対して、導出された位置ずれを加算して得られた対象物の測定部位の位置に対応する輝度値を取得する輝度値取得部と、取得された輝度値に基づいて、位相シフト法による波形を作成する波形作成部とを備える。
(もっと読む)
アライメント方法およびパターン形成方法
【課題】2つの基板のそれぞれに形成されたアライメントマークの両方に同時にピントを合わせることができない場合であっても、それらの位置合わせを高精度に行うことを可能にする。
【解決手段】パターンを転写される基板に形成されるアライメントマークAM1は、正方形の中実図形であるアライメントパターンAP101〜AP109、AP111〜AP114を配列してなるものとする。一方、基板に転写すべきパターンを担持するブランケットには、アライメントマークAM2として、環状の中空矩形のアライメントパターンAP2をパターンと同じ材料で形成する。アライメントマークAM1は、低い空間周波数成分をアライメントパターンAP2よりも多く含むパターンにより構成されており、ピントが合わない状態で撮像された場合でも重心位置を精度よく検出することが可能である。
(もっと読む)
移動距離計測装置、移動速度計測装置及びこれらを用いた撮像装置
【課題】対象物(被写体)の位置及び移動方向に限定されることなく、移動する対象物を撮像することによって、その対象物の移動距離を計測すること。
【解決手段】移動している被写体を撮像して、前記被写体の移動距離を計測する移動距離計測装置であって、撮像する位置から前記被写体までの距離に関する距離データを取得する測距手段と、撮像レンズを用いて、所定の時間間隔で前記被写体を撮像して、複数の画像を生成する画像生成手段と、前記距離データに基づいて前記複数の画像のうちの任意の2つの画像の前記被写体の位置に関する位置データを算出し、該位置データに基づいて前記撮像レンズの光軸の方向に対して垂直な平面に関する被写体の移動距離を算出する算出手段とを有することを特徴とする移動距離計測装置により上記の課題が達成される。
(もっと読む)
画像解析装置及びこれを用いた物体検出装置
【課題】対象物体上の外表面形状によらず、対象物体までの距離を利用した適正な制御や処理を実現することを課題とする。
【解決手段】自動車に搭載された2つのカメラ10A,10Bで自車両周囲の撮像領域を撮像して得られる複数の撮像画像を解析して対象物体までの距離を算出する際、撮像領域に向けて互いに異なる方向から非可視光を照射する2つの光照射部21,22の光照射時期が互いに重複しないように交互に非可視光を照射し、当該非可視光の照射によって対象物体の外表面に生じる非可視光の照射領域と非照射領域との境界線C1,C2上の同一の地点を映し出す対応点を光照射時期ごとにそれぞれ特定し、光照射時期ごとに、対応点のズレ量に基づいて距離を算出する。
(もっと読む)
LED照明を用いた観察装置、膜厚むら検出装置並びに膜厚むら検出装置付塗布装置
【課題】 発光ダイオードを多数配列した面照明を使用した場合であっても、LEDの全点灯までの時間遅れの影響を受けることなく、検査時の照明光量を一定に保ちつつ、短時間で検査を行うことができる、膜厚むらの検出装置並びに当該装置を具備した塗布装置を提供する。
【解決手段】 基板上に形成された皮膜の膜厚むらを検出する装置で、
基板保持部と、光源部と、撮像部と、制御部と、検査部とを備え、
光源部は複数の発光ダイオードを配置して構成された面照明であり、
制御部は、発光指令信号を出力してから複数の発光ダイオードが全点灯状態になるまでの点灯遅れ時間を登録する点灯遅れ時間登録部と、発光指令信号を入力してから登録された点灯遅れ時間経過後に、撮像部に対して撮像指令信号の出力を行う撮像ディレイタイマ部とを備えたことを特徴とする、膜厚むら検出装置。
(もっと読む)
積層ゴムの検査装置及び積層ゴム
【課題】積層ゴムの水平変位量及び回転量を同時に測定する。
【解決手段】上部部材と下部部材に固定され、水平方向に変位される積層ゴム10の外周部に周方向へ複数設けられたマーキングを異なる角度から同時に撮像する複数の撮像手段34A,34Bと、前記撮像手段34A,34Bによって撮像された画像上の前記マーキングの座標を算出する座標算出手段と、異なる撮像手段34A,34Bによって同時に撮像された複数の画像上の前記マーキングの移動量から、積層ゴム10の水平変位量及び中心軸周りの回転量を演算する演算手段46と、を有する。
(もっと読む)
1 - 20 / 2,728
[ Back to top ]