
Fターム[2F065JJ07]の内容
光学的手段による測長装置 (194,290) | 受光部 (23,546) | 配置;方向 (2,894)
Fターム[2F065JJ07]の下位に属するFターム
Fターム[2F065JJ07]に分類される特許
1 - 20 / 416
検査装置
ガラス基板検査装置及びガラス基板製造方法
画像処理装置、運転支援装置、画像処理方法及び画像処理プログラム
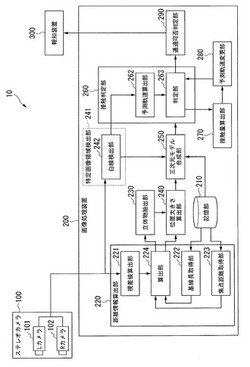
【課題】移動体が移動する際の安全を確保するための画像処理装置を提供する。
【解決手段】移動体の予測軌道と、三次元モデルにおける移動体の位置及び大きさと、三次元モデルにおける立体物の大きさ及び位置とに基づいて、三次元モデルにおいて予測軌道上で移動体が立体物に接触するか否か判定する接触判定部260を備える。また、ステレオカメラの画像に基づいて距離を測定し、立体物の位置及び大きさを算出する。さらに、算出した横幅の接触量に基づいて予測軌道を変更した上で接触するか否か判定する。
(もっと読む)
高さ測定装置及び高さ測定方法

【課題】鏡面性を持つ試料の各位置の高さを正確に求めることができる技術を提供する。
【解決手段】撮像部2は、例えば所定のフレームレートで、試料Sの画像である試料画像を撮像する。輝線抽出部は、撮像部2により順次に撮像された試料画像から輝線を抽出し、所定の基準高さ及び基準傾きを示す基準輝線に対する各輝線のずれw(x)を求める。高さ算出部は、w(x)=2L・(d/dx)・d(x)+2sinθ・d(x)に、輝線抽出部により抽出された輝線のずれw(x)を代入することで、基準高さからの試料Sの高さd(x)を順次に算出する。
(もっと読む)
シート体の縁部検出センサ
【課題】生地などのシート体の縁部を正確に検出することができる。
【解決手段】当接部材20と、当接部材20に面当接しているシート体Wへ向けて検出光を投光する投光部2と、投光部2が投光した検出光を受光する受光部3と、受光部3の受光量を基にシート体Wを検出する検出部35とを備え、投光部2は、シート体Wとその縁部Waから外れた外領域とにわたって検出光を投光できるように並設された複数の投光口2aを有し、受光部3は投光口2aに個別に対応する受光口3aを有し、検出部35は受光口3aに個別に対応する判断部を有している。
(もっと読む)
検出装置
【課題】可及的にワークの移動が自由であり、後工程の作業の妨げともなりにくい簡易な構成のワーク位置の検出装置を提供する。
【解決手段】検出光(40)を投光する投光部(10)と、検出光を受光する受光部(20)と、投光部と受光部を所定の位置関係に保つ支持手段(30)と、を備え、受光部が一次元又は二次元に配置された複数の受光素子を含み、上記支持手段が、投光部と受光部との間に設けられる検出基準面に対して検出光(40)が斜めになるように投光部と受光部の位置を保持する。
(もっと読む)
三次元形状計測装置、三次元形状計測装置の制御方法、およびプログラム
【課題】対象物の奥行方向に対する計測精度の低下を抑制し、計測空間全域において良好な計測精度を得る。
【解決手段】計測空間への投影動作を実行する投影部と、投影動作が実行された計測空間中の対象物を撮影する撮影部と、撮影された画像に基づいて対象物の三次元形状を計測する計測部と、を備え、計測空間は、撮影部の撮影光学系のフォーカス位置の基準となる計測基準面を含み、且つ投影部の投影範囲と撮影部の撮影範囲とに基づいて規定されており、フォーカス位置は、撮影部から観察した場合に計測基準面の位置よりも奥に設定されている。
(もっと読む)
膜厚測定装置および膜厚測定方法
【課題】屈折率が未知の誘電体薄膜の膜厚を正確に測定することができる膜厚測定装置および膜厚測定方法を提供する。
【解決手段】膜厚測定装置は、第1の反射干渉光および第2の反射干渉光のそれぞれについて第1の波長分布および第2の波長分布を生成する波長分布生成部72と、第1の波長分布および第2の波長分布にもとづいて、それぞれ第1の入射角に対応する第1の光路差および第2の入射角に対応する第2の光路差を求める光路差算出部73と、入射角、膜厚および屈折率を変数とした関数として光路差を表した式を用いて、第1の入射角および第2の入射角ならびに光路差算出部73に算出された第1の光路差および第2の光路差を式に代入することにより、薄膜の膜厚および屈折率を求める膜厚屈折率算出部74と、を備える。
(もっと読む)
電子測定器
【課題】測定対象物の寸法を電子的に測定可能な電子測定器を提供する。
【解決手段】等ピッチで1列に並べられた受光素子アレイ20と、受光素子アレイ20に結像するレンズ系16と、測定対象物25へ光を照射する光源26と、測定対象物25から反射した光を受光素子アレイ20により受光して出力されるアナログ信号をディジタル処理する信号処理部28と、信号処理部28によって得られたディジタル計数値DSを表示する表示部12とを備え、ディジタル計数値DSにより、測定対象物25の大きさを表示することを特徴とする電子測定器10。
(もっと読む)
車載用カメラ
【課題】ローリングシャッタ法で駆動される2台の車載用カメラであって、車両から対象物までの距離を正確に測定することができる車載用カメラを提供する。
【解決手段】本発明の一実施形態に係る車載用カメラは、行列に配置された撮像素子を有し、隣接する行間のシャッタ時間に所定のずれ時間を有しつつ先頭行から最終行に向かって順次シャッタを切るXYアドレス読み出し法で駆動される2台の車載用カメラであって、2台の車載用カメラの中心を結ぶカメラ間中心線が路面となす角が垂直となるように、かつそれぞれの撮像素子の行方向がカメラ間中心線に平行となるとともにそれぞれの先頭行から最終行への向きが一致するように、車両に配置されるものである。
(もっと読む)
可動式ホーム柵監視用カメラ装置
【課題】都市部の駅ホームや、地下鉄の駅ホームでは、駅ホームのスペースが狭く、列車の乗降口または可動式ホーム柵の開閉部を広範囲にするための監視用カメラ装置のカメラ部の設置スペースを十分に確保できない。
【解決手段】本発明の可動式ホーム柵監視用カメラ装置は、可動式ホーム柵と、反射鏡と、前記可動式ホーム柵内に設置し前記反射鏡を介して前記可動式ホーム柵を撮像するカメラ部と、前記カメラ部が撮像した画像から乗客を検出する画像処理部と、モニタとを備え、前記画像処理部は、前記カメラ部が撮像した画像から前記可動式ホーム柵の開閉部およびその周辺を切り出して合成した合成画像を作成し、前記モニタは、前記合成画像を表示する。
(もっと読む)
パターン画像表示装置およびパターン画像表示方法
【課題】コントラストの高いパターン画像の表示を低コストにて実現する。
【解決手段】パターン画像表示装置の画像取得部13は、光照射部131、ラインセンサ132、角度変更機構、および、表示対象であるガラス基板9を移動する移動機構を備える。光照射部131からは、ガラス基板9の薄膜パターンに対して透過性を有する波長の光が出射される。光照射部131からの光の照射角θ1およびラインセンサ132により撮像が行われる検出角θ2は、常に同じであり、これらの角度は角度変更機構により変更される。パターン画像表示装置では、予め画像のコントラストが高くなる照射角および検出角の設定角度が求められ、照射角および検出角が設定角度とされる。これにより、単一波長の光源を用いてコントラストの高い画像をラインセンサ132により取得し、ディスプレイに表示することができ、パターン画像表示装置の製造コストも削減することができる。
(もっと読む)
カメラ状態測定装置およびカメラ状態測定方法
【課題】ステレオカメラの設置状態を、簡単にかつ精度良く測定することができるカメラ状態測定装置を提供すること。
【解決手段】カメラ状態測定装置100は、ステレオカメラの設置状態に関し、ステレオカメラの撮影画像から、特徴点を抽出する特徴点検出部130と、特徴点検出部130で検出された特徴点のうち、基準面上に位置する2点の指定をユーザから受け付ける計測点指定部150と、上記2点についての対カメラ距離d1、d2を取得する対カメラ距離測定部180と、上記2点にいての対カメラ角θ1、θ2を取得する対カメラ角測定部190と、上記d1、d2、θ1、θ2に基づいて、ピッチ角θ0を算出するピッチ角計算部200と、上記d1、d2、θ1、θ2、θ0に基づいて、カメラ高さhを算出するカメラ高さ計算部210とを有する。
(もっと読む)
ワーク位置検出システム
【課題】透明体であるワークの安定的な位置を検出することができるワーク位置検出システムを提供する。
【解決手段】透明体であるワークの端面が発光するように光を照射する少なくとも一つの投光部(21a〜21c)と、光によってワークの端面に生じた発光箇所を撮像する撮像部(22a、22b)と、撮像部による撮像結果に基づいてワークの位置を検出する検出部と、を有する。
(もっと読む)
投影制御装置及び投影制御方法
【課題】投影装置の動作をフレームごとに制御することを可能にする。
【解決手段】投影装置を制御するための投影制御装置は、複数の色成分で構成された映像信号を受信し、受信した映像信号の各フレームについて特定の色成分の情報を制御情報として抽出し、抽出された制御情報に基づいて投影装置の動作を制御するための投影制御情報をフレームごとに生成し、生成した投影制御情報を投影装置に供給する。
(もっと読む)
ガラス基板の表面不良検査装置および検査方法
【課題】ガラス基板の表面不良の判定時間を減らし、NGの可能性の高い表面不良のみを検査員に提供して検査の集中度を極大化させる。
【解決手段】表面不良検査装置は、ガラス基板1の上方にそれぞれ配置され、ガラス基板表面不良に対する第1イメージおよび第2イメージをそれぞれ撮影する撮像装置10および20と、ガラス基板1の下方に配置され、撮像装置10、20側にガラス基板1を透過する暗視野照明装置30と、第1イメージ上の不良の位置座標と、第2イメージ上の不良の位置座標とを演算する検出信号処理部40とを備えている。ガラス基板上面に対する撮像装置10、20の撮影領域P1は互いに重ね合わされ、ガラス基板下面に対する撮像装置10、20の撮影領域P2、P3は、互いに異なるように構成されている。
(もっと読む)
情報処理装置、情報処理方法
【課題】誤検出指標や検出精度の低い指標による影響を減少させ、高精度かつより安定な撮像装置の位置姿勢計測方法を提供する。
【解決手段】指標検出部2030は、物体上に配置または設定された指標P1、P2、P3を撮像画像から検出する。評価量算出部2060は評価量を、指標P1、P2、P3の画像上での2次元幾何特徴及び/又は指標P1、P2、P3の3次元空間中における撮像装置2010と指標P1、P2、P3との間の関係を表す3次元幾何特徴を利用して算出する。信頼度算出部2070は、算出した指標P1、P2、P3の評価量に応じて指標P1、P2、P3の信頼度を算出する。位置姿勢算出部2080は、算出された指標P1、P2、P3の信頼度と、検出された夫々の指標P1、P2、P3の画像座標に関する情報とを少なくとも用いて、物体または撮像装置2010の位置姿勢を求める。
(もっと読む)
移動体及び移動面検出システム
【課題】照度の低い環境において、コントラストが低い移動面上を移動する移動体の位置及び姿勢、並びにその移動面の形状を検出する。
【解決手段】移動体及び移動面検出システム1は、移動体3と、移動体3上に配置された発光部4と、移動体3を俯瞰する位置に設けられたステレオカメラ5及び測距センサ6と、ステレオカメラ5及び測距センサ6の出力を処理する処理部7と、処理部7の出力を表示する表示部8とを備える。ステレオカメラ5は、発光部4のステレオ画像を撮像する。測距センサ6は、移動面に光を出射し、移動面で反射されて戻ってくる光の飛行時間に基づいて移動面を測距する。処理部7は、ステレオカメラ5が撮像したステレオ画像に基づいて移動体3の位置及び姿勢を検出するとともに、測距センサ6の出力に基づいて移動面の形状を検出し、移動体3の位置及び姿勢と、移動面の形状とを表示部8に表示する。
(もっと読む)
物品径の測定方法
【課題】センサ等を物品内に挿入することなく当該物品の内径や外径を効率的に測定する。
【解決手段】回転テーブル1上に載置された物品2の内周面21と、物品2の外に配設され回転テーブル1の回転軸13からの距離が判明している校正面4aとに、物品2の外に配設した二次元レーザ変位計3のスキャン線を位置させて、内周面21と校正面4aとの変位差を二次元レーザ変位計3にて測定し、上記距離と変位差に基づいて内周面21の半径を算出する。二次元レーザ変位計3のレーザ射出点とスキャン線を含む面上に、回転テーブル1の回転軸13が位置するように変位計3が配置されており、回転テーブル1を回転させて、内周面21とこれと径方向対称位置にある他の内周面における各半径を算出して、これら半径の値を合計することで物品2の直径を算出する。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】広い範囲にわたって対象物体の位置を高い精度で検出することのできる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10の検出対象空間10Rは、受発光ユニット15Aおよび受発光ユニット15Bによる検出対象空間10Rabと、受発光ユニット15Cおよび受発光ユニット15Dによる検出対象空間10Rcdとに分割されている。受発光ユニット15B、15CはZ軸方向で重なっており、受発光ユニット15Bの受光素子13Bと受発光ユニット15Cの受光素子13Cは、受光面を異なる方向に向けてZ軸方向で重なるように配置されている。
(もっと読む)
1 - 20 / 416
[ Back to top ]