
Fターム[2F065LL28]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | スリット (523)
Fターム[2F065LL28]の下位に属するFターム
回転スリット (19)
Fターム[2F065LL28]に分類される特許
1 - 20 / 504
ガラス基板検査装置及びガラス基板製造方法
検査装置
トレンチ深さ測定装置及びトレンチ深さ測定方法並びに共焦点顕微鏡
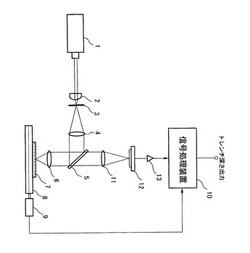
【課題】トレンチ幅が照明光の波長と同程度の高アスペクト比のトレンチの深さを測定できるトレンチ深さ測定装置を実現する。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
(もっと読む)
対象検出装置および対象検出方法

【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
コークス炉移動機の位置調整方法及び装置
【課題】コークガイド車などの移動体の移動路に沿って設けられた目標体とコークス炉の位置関係に誤差が生じても移動機を簡易に目標とする位置にする。
【解決手段】コークガイド車1の移動路に沿って設けられた目標体9を検出し、目標体検出装置4で目標体9を検出したときのコークガイド車1の規定位置に対し、目標位置検出装置5で目標位置を検出しながら規定位置から目標位置までコークガイド車1を移動し、検出された目標位置と規定位置との位置誤差を記憶し、以降、目標体9を検出した位置から記憶された位置誤差分だけ移動してコークガイド車1を目標位置にすることにより、目標体9とコークス炉7の位置関係に誤差が生じても、一度、目標体9を検出したときの規定位置と目標位置との位置誤差を記憶してしまえば、以降はコークガイド車1を簡易に目標とする位置にすることができる。
(もっと読む)
非球面形状計測装置
【課題】非球面形状を有する被検面を高精度に計測するのに有利な非球面形状計測装置を提供する。
【解決手段】光源1から射出された光を非球面形状を有する被検面14に照射する照明光学系7と、前記被検面に照射する光の一部を遮光する遮光板6と、前記照明光学系及び前記遮光板を介して光が照射された前記被検面の一部の領域から反射される光束を計測するセンサ10を有する撮像系と、前記センサにより計測されたデータから前記被検面の形状を算出する算出手段と、を有し、前記遮光板は、光軸に対し前記被検面の一部の領域の反対側が遮光されるように構成され、前記被検面の一部の領域から反射される光束と光軸との交点を複数の計測光交点とした場合、前記複数の計測光交点のうち前記被検面に最も近い計測光交点16と前記被検面との間に配置される。
(もっと読む)
触針式測定装置
【課題】触針が測定点の直上に位置している状態において測定対象物の表面の測定点を実質的に真上から検知することを可能とする観察手段を備えた触針式測定装置を提供する。
【解決手段】触針式測定装置100において、長手軸線方向に延在する細長い触針110であって、測定対象物10の表面12の所定の測定点14に運ばれて同測定点14に接触するようにされる尖端部112を有する触針110と、該触針110の周囲の少なくとも一部に配置され、表面12の測定点14及び該測定点14の周囲からの光を受光する受光部130と、を備え、受光部130で受光した光に基づき、測定点14に対する尖端部112の位置決めを行う。
(もっと読む)
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
高さ位置検出装置およびレーザー加工機
【課題】チャックテーブルに保持された被加工物の高さ位置を正確に検出することができる高さ位置検出装置および高さ位置検出装置を装備したレーザー加工機を提供する。
【解決手段】発光源81と、強度分布を整形するNDフィルター83と、集光して被加工物Wに照射する集光器7と、第1の経路と第2の経路に導く第1のビームスプリッター84と、第3の経路と第4の経路に分光する第2のビームスプリッター86と、第3の経路に分光された反射光を受光する第1のホトデテクター88aと、第4の経路の反射光を帯状に通過させるスリット891を備えたマスク89と、マスクを通過した反射光を受光する第2のホトデテクター88bと、第1のホトデテクターによって受光した光量と第2のホトデテクターによって受光した光量との比率を求め、比率に基づいてチャックテーブル36に保持された被加工物の高さ位置を求める制御手段とを具備している。
(もっと読む)
位置検出装置、位置検出方法、露光装置、露光方法およびデバイス製造方法
【課題】反射面を通過した光束に発生する偏光成分による相対的な位置ずれなどの影響を実質的に受けることなく、被検面の面位置を高精度に検出することのできる面位置検出装置。
【解決手段】投射系は、第1反射面7b,7cを有する投射側プリズム部材7を備えている。受光系は、投射側プリズム部材に対応するように配置された第2反射面8b,8cを有する受光側プリズム部材8を備えている。第1反射面および第2反射面を通過した光束の偏光成分による相対的な位置ずれを補償するための位置ずれ補償部材をさらに備えている。
(もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】ステージを正確に2次元駆動する。
【解決手段】 XエンコーダとYエンコーダとを少なくとも各1つ含む3つのエンコーダを用いて、ステージWSTの移動面内の位置情報を計測する。ステージWSTの位置計測値に基づいて、位置計測に用いるエンコーダを、エンコーダEnc1,Enc2及びEnc3から、エンコーダEnc4,Enc2及びEnc3に切り換える。切り換えの際、座標つなぎ法又は位相つなぎ法を適宜切り換えて適用して、新たに使用するエンコーダEnc4の初期値を設定する。それにより、ステージWSTの位置計測に用いるエンコーダが逐次切り換えられるにもかかわらず、切り換えの前後でステージの位置計測値が保存され、ステージを正確に2次元駆動することができる。
(もっと読む)
光学特性測定装置および光学特性測定方法
【課題】本発明は、取得したスペクトルから基板上に形成した膜の複数の測定点に対する光学定数を唯一の値として求めることができる光学特性測定装置および光学特性測定方法を提供する。
【解決手段】本発明は、光源10と、検出器40と、データ処理部50とを備えている。データ処理部50は、モデル化部と、解析部と、フィッティング部とを備えている。複数の膜モデル式を連立させ、複数の膜モデル式に含まれる光学定数が同一であるとして所定の演算を行ない、算出した膜の膜厚および光学定数を膜モデル式に代入して得られる波形と、検出器40で取得した波長分布特性の波形とのフィッティングを行なうことにより、複数の膜モデル式に含まれる光学定数が同一で、解析部で算出した膜の膜厚および光学定数が正しい値であることを判定する。
(もっと読む)
3次元測定装置、3次元測定方法及びプログラム
【課題】測定対象物が明るさ(色)の異なる複数の領域を有している場合に、適切にその測定対象物を3次元測定することができる3次元測定装置等の技術を提供すること。
【解決手段】本技術の一形態に係る3次元測定装置は、投影部と、撮像部と、制御部とを具備する。前記投影部は、照度を変化可能な照明を有し、前記照明からの光により測定対象物に縞を投影する。前記制御部は、前記撮像部により前記測定対象物の画像を撮像させ、撮像された前記測定対象物の画像から輝度値を取得し、取得された前記輝度値に基づいて、前記測定対象物に対して複数の検査ブロックを割り当て、割り当てられた前記検査ブロック毎に、前記照明の測定照度を決定し、決定された前記測定照度で、それぞれ、前記投影部により前記検査ブロックに対して縞を投影し、前記縞が投影された前記検査ブロックの縞画像を前記撮像部により撮像し、撮像された前記縞画像に基づいて前記測定対象物を3次元測定する。
(もっと読む)
電気転てつ機のロック狂い検知器の位置調整冶具
【課題】電気転てつ機のロック狂い検知器の固定スリット部材の位置合わせを容易に行うことができる電気転てつ機のロック狂い検知器の位置調整冶具を提供する。
【解決手段】電気転てつ機本体に着脱可能で固定スリットが形成された固定スリット部材と、固定スリットに光を通過させる発光素子および受光素子と、を備えるロック狂い検知器の位置調整を行うための電気転てつ機のロック狂い検知器の位置調整冶具21において、電気転てつ機本体に着脱可能な本体部22と、固定スリット部材に着脱可能で本体部22に電気転てつ機の鎖錠カンの移動方向に移動可能に支持された移動部23と、移動部23と連結されて移動部23を鎖錠カンの移動方向に移動させるネジ部24と、を備えている。
(もっと読む)
位置確認システム
【課題】利用者による特別な動作が無くても利用者の位置を確認することが可能な位置確認システムを提供する。
【解決手段】位置確認システム1Aにおいて、発光装置20は、当該発光装置に固有の信号が含まれるように変調された光を発光し、受光装置30Aは、反射装置で反射した光を受光したときに、受光した光に含まれる信号を制御装置40へ出力し、制御装置40は、発光装置20に固有の信号と当該発光装置20の設置場所とが関連付けて記憶された記憶部41と、受光装置30Aから出力された信号を用いて記憶部41を参照することによって、信号に関連付けられた設置場所を記憶部41から読み出す位置確認部42と、を備える。
(もっと読む)
3次元シーンの要素の奥行きを評価する装置
【課題】3次元シーンに分布した被写体要素(object element)の奥行きを評価するための有利な装置を提案すること。
【解決手段】装置は、光学系であって、それ自体が、複数の画素21、22、23を有する光センサ2、および光センサの画素の1つの上にシーンの要素E1、E2、E3を結像できるレンズ1を備える光学系と、この要素からきてビットマップ方式の光センサの画素のうちの1つによって取り込まれた光のストリームの最大値に着目することによって焦点を調整できるシーンの要素のいずれか1つに光学系の焦点を調整する手段と、この焦点の調節からこの要素の奥行きを推定するのに適した手段とを備える。
(もっと読む)
管内面検査装置およびその検査方法
【課題】管内面の状態や寸法によらずに管内面を検査することができる管内面検査装置およびその検査方法を提供する。
【解決手段】本発明の実施形態は、管2内面の検査箇所にパターンを有するパターン光P1を管2内面の周方向にわたって投影する投影手段11と、検査箇所に投影され反射されたパターン光を反射パターン光P2として投影する表示手段12と、反射パターン光P2の形状を観測する観測手段13とを備える。
(もっと読む)
測定装置
【課題】内径の異なる種々の穴形状を精度良く測定できる測定装置を提供すること。
【解決手段】被測定領域の少なくとも一部の面の法線方向とは異なる方向から前記被測定領域に照明光を照射することで被測定領域に帯状の照明領域を形成する照明系と、前記照明系による照射方向と前記帯状の照明領域における長手方向等を含む面からはずれた位置から照明領域の散乱光を受光する受光系と、受光系の受光結果に基づいて被検面の形状を算出する演算部と、を備える。
(もっと読む)
形状測定装置、及び形状測定方法
【課題】試料を詳細かつ適切に評価することができる形状測定装置、及び形状測定方法を提供する。
【解決手段】本発明の一態様にかかる形状測定装置は、観察窓51と、基板54とを有する試料保持ユニット11と、観察窓51又は基板54を介して、試料53を加圧するシリンダ56、57と、試料51の形状を測定するため試料51を照明するとともに、照明光の焦点位置を光軸方向に走査可能な共焦点光学系30と、共焦点光学系30を介して、試料保持ユニット11に保持された試料からの反射光を検出するラインセンサ15〜17と、焦点位置を光軸方向に走査した時での検出結果によって、形状を測定する処理部18と、を備え、観察窓51の表面51aに焦点位置を合わせて、観察窓51の表面形状を測定するものである。
(もっと読む)
裁断対象検査装置、裁断対象検査方法、裁断対象検査装置用のプログラム、および、裁断対象検査システム
【課題】多段積みされた裁断対象を精度良く検査できる裁断対象検査装置等を提供する。
【解決手段】多段積みされた裁断対象Bkを検査する裁断対象検査装置において、所定形状のレーザ光L1、L2が投影された裁断対象の画像データを取得し(S7)、画像データからレーザ光が投影された部分の画像を抽出し、抽出されたレーザ光の画像からレーザ光の投影形状の情報を算出し(S8)、所定形状の情報と投影形状の情報とに基づき、多段積みされた裁断対象の良否を判定する(S11)。
(もっと読む)
1 - 20 / 504
[ Back to top ]