
Fターム[2F065LL41]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 格子 (823)
Fターム[2F065LL41]の下位に属するFターム
回折格子 (629)
Fターム[2F065LL41]に分類される特許
21 - 40 / 194
情報処理装置、情報処理方法
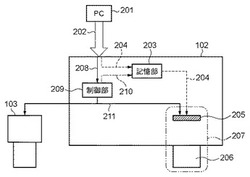
【課題】 パターン画像を高速に投影して撮像する為の技術を提供すること。
【解決手段】 ストライプ状の模様が記されたパターン画像を定期的に送信するPC201から、該パターン画像を受信する。パターン画像の送信周期内に、パターン画像におけるそれぞれ異なる水平ラインごとに、該水平ライン上の画素群を繰り返し用いて形成される投影画像を投影部207に入力する。投影部207が投影画像を投影する毎に、該投影のタイミングでカメラ103に撮像させる。
(もっと読む)
3次元測定装置

【課題】測定対象物に投影される縞の像の歪みを防止することができ、また、影の問題や、ハレーションの問題等を解消することができる3次元測定装置を提供すること。
【解決手段】3次元測定装置100は、投影部20と、撮像部30とを含む。投影部20は、基板10に向けて垂線を下ろしたときの基板の表面(投影面)との交点3の周囲の領域である投影可能領域2に縞を投影可能とされる。撮像部30は、投影可能領域2内に複数の撮像領域1を有する。投影可能領域2は、広範な領域とされているので、投影可能領域2内には複数の撮像領域1を設けることができる。撮像可能領域2内における撮像領域1の位置等は、影あるいはハレーションの影響の排除等を目的として設定される。
(もっと読む)
基板検査装置
【課題】位相シフト法を利用した三次元計測を行うにあたり、計測精度の向上を図ることのできる基板検査装置を提供する。
【解決手段】基板検査装置8は、プリント基板に対し光を照射する照明装置10と、当該プリント基板を撮像するCCDカメラ11と、制御装置12とを備えている。制御装置12は、CCDカメラ11により撮像された元画像データを記憶する元画像データ記憶手段24と、元画像データからRGB各色成分を抜き出す抜き出し画像データ作成手段25と、抜き出し画像データのデータ欠落部分を補完する補完画像データ作成手段26と、当該補完画像データを基にカラー輝度画像を作成するカラー画像作成手段27と、当該カラー輝度画像を基に計測対象領域を抽出する二次元計測手段28と、当該計測対象の三次元計測を行う三次元計測手段29と、当該計測結果を基にハンダの印刷状態を検査する判定手段30とを備えている。
(もっと読む)
三次元形状測定装置
【課題】多乱光の影響による三次元形状の測定の誤差を抑制する。
【解決手段】三次元形状測定装置は、投影部と、調整部と、検出部と、制御部とを備える。投影部は、測定対象物に対してパターン光を照射する。調整部は、パターン光の照射強度を調整する。検出部は、パターン光の照射された前記測定対象物の表面の明るさを検出する。制御部は、パターン光を照射しない非照射状態で検出される測定対象物の表面の明るさに基づいて調整部による照射強度の調整を制御する。
(もっと読む)
計測装置
【課題】簡単な構成で、試料を加熱しつつ正確に計測することが可能な計測装置を提供する。
【解決手段】計測装置は、試料Aを保持する位置または試料Aに対向する位置に配置され、透明基板121と透明基板121の表面に設けられた透明導電膜122を有する透明部材12と、試料Aを撮影する光検出部22と、透明部材12の透明導電膜122に印加する電圧を制御することにより、透明部材12の温度を制御する熱制御部42とを備える。
(もっと読む)
インプリント装置、そのモールド及び物品の製造方法
【課題】 ショット領域間の相対位置の計測を容易に行いうるインプリント装置を提供する。
【解決手段】 インプリント装置は、基準マークが形成されたモールドを保持する支持体と、各ショット領域に第1マーク及び第2マークが形成された基板を保持する基板ステージと、前記各ショット領域に形成された前記第1マーク及び前記第2マークと前記モールドに形成された前記基準マークとを検出することによって前記各ショット領域間の相対位置を計測する検出器とを備える。前記検出器は、隣接しあう2つのショット領域のそれぞれに形成された隣接しあう前記第1マーク及び前記第2マークそれぞれの前記基準マークに対する位置を検出することによって、隣接しあう前記2つのショット領域間の相対位置を検出する。
(もっと読む)
形状計測装置および形状計測方法
【課題】1つのカメラの視野に入らない計測対象物の裏側の形状まで精度良く計測する装置および方法を提供する。
【解決手段】計測対象物に格子模様を投影する格子模様投影部と、計測対象物の周囲に配置された少なくとも1つの鏡と、計測対象物および鏡に映る計測対象物の鏡像の画像を撮影する少なくとも1つの撮影部と、計測対象物の画像と鏡像の画像の各々に対して位相解析処理を施して計測対象物の形状を算出するとともに撮影された前記計測対象物の画像と前記鏡像の画像とを合成する解析処理部とを備え、撮影部の各々は、計測対象物の少なくとも一部の領域と該少なくとも一部の領域の鏡像とを同時に撮影可能に配置されていることを特徴とする。
(もっと読む)
シート材の方向検出方法及び装置、並びにシート材の切断方法、欠陥検査方法及びプリント方法
【課題】シート材に形成されたレンチキュラレンズの傾き方向と角度とを検出する。
【課題を解決するための手段】多数のレンズ14が表面に形成されたウエブ11に対して、その垂直方向から幅広にしたスポット光SPを照射する。ウエブ11から下方に離れ、またスポット光SPの光軸SPLから搬送幅方向に離してラインセンサ22を配置してある。このラインセンサ22により、搬送幅方向に対する屈折光TPのずれを直線方向のずれとして検出する。この検出結果に基づいて、スポット光SPの光軸回りに回転した屈折光TPの傾き方向,角度θを判定部23によって特定し、その特定した傾き方向,角度θをレンズの傾き方向,角度θとする。
(もっと読む)
基板検査方法
【課題】本発明は複数の投影部を通して測定対象物が形成された基板を検査する検査方法を提供する。
【解決手段】本発明の基板検査方法によると、複数の投影部を通して測定対象物が形成された基板にパターン照明を順に照射して基板に対する投影部別位相データを取得し、取得された投影部別位相データを用いて基板に対する投影部別高さデータを抽出する。複数の投影部のうち信頼度が最もよい投影部を基準投影部で設定し、基準投影部の高さデータを基準にして残り投影部の高さデータを整列させる。整列された高さデータを用いて統合高さデータを抽出する。このように、信頼度が最も高い投影部を基準として残りの投影部の高さを整列させることで、統合高さデータの信頼性を向上させることができる。
(もっと読む)
基板検査方法
【課題】 基板に実装された部品を検査する基板検査方法に関わり、より詳細には正確な端子領域を検出して部品の実装状態を検査することのできる基板検査方法を提供する。
【解決手段】印刷回路基板上に形成された部品の端子のチップ位置設定方法は基板上に形成された部品の端子と隣接して形成されたハンダに対して測定された測定高さを設定された基準高さと比較して仮象チップラインを設定することと、端子の長さ方向に沿って端子の幅方向に関する中心ラインを設定することと、仮象チップライン及び中心ラインの交差点から中心ラインによる測定高さを用いて端子のチップ位置を設定することと、を含む。従って、より正確な端子のチップ位置を獲得することができる。
(もっと読む)
検査装置
【課題】 基板を検査するにおいての所要される時間を節減することができ、空間を確保することのできる検査装置を提供する。
【解決手段】基板上に形成された測定対象物の良否を判断する検査装置はワークステージ部、光学モジュール及び光学モジュール移送部を含む。光学モジュール移送部は光学モジュールの上部に配置されて光学モジュールと結合され、光学モジュールを移送する。それにより、基板を検査するに所要される時間を節減することができ、空間を確保することができる。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】光源の光量に変化があった場合であっても、三次元形状を精度良く算出することができる。
【解決手段】三次元形状測定装置1は、メイン光源22が発光した光を縞パターンに変換して測定対象物11上に投影する投影部13と、測定対象物11を撮像する撮像部14と、投影部13が投影する縞パターンの位相を変化させながら、撮像部14に測定対象物11の撮像を繰り返しさせるとともに、縞パターンの画像を複数順に取得する制御部と、メイン光源22の光量の変化量を検出し、当該検出した変化量が所定の値以上である場合に、当該検出した変化量に基づいて前記縞パターンの画像を補正し、当該補正した縞パターンの画像に基づいて、測定対象物11の三次元形状を算出する形状算出部と、を備える。
(もっと読む)
回折光学素子及び計測装置
【課題】分散型の光スポットを生成することのできる回折光学素子および計測装置を提供する。
【解決手段】凹凸を有し、入射した光を2次元的に回折して、回折光を発生させる回折光学素子であって、前記回折光により形成される一部または全部の光スポットの個数をnとした場合、前記光スポットが照射される領域の面積により規格化された前記光スポットにおける平均最近隣距離Wは、1/(2×n1/2)<W<1/(n1/2)の範囲内であることを特徴とする回折光学素子を提供することにより上記課題を解決する。
(もっと読む)
3次元計測装置及び3次元計測方法
【課題】1回の撮影で視野全体の3次元形状について、その特徴を漏れなく計測することができる3次元計測装置及び3次元計測方法を提供する。
【解決手段】 複数方向の複数の直線及び/又は曲線状のレーザラインにより構成されるレーザパタンをレーザ投影手段から計測対象物に投影し、該レーザパタンが投影された計測対象物を異なる方向から撮影して第1の画像及び第2の画像を取得し、この第1の画像及び前記第2の画像からレーザラインを抽出し、第1の画像のレーザライン点に対応する第2の画像のレーザライン点の対応点候補の3次元座標を夫々求め、該3次元座標を前記レーザ投影手段に設定される投影手段座標系に変換して前記レーザパタンが構成されているレーザパタン平面に射影した夫々の射影点が前記レーザパタン上にあるか否かを判定することにより、対応点を求める。
(もっと読む)
位置検出装置、ロータリスケール、および位置検出装置を備える液体吐出装置
【課題】受光部における誤検出を防止可能なロータリスケールを具備する位置検出装置、ロータリスケール、および位置検出装置を備える液体吐出装置を提供すること。
【解決手段】被検出物の位置検出を行う位置検出装置であり、発光部62および受光部64を備え、これらの間に空間部613を備えるフォトセンサ60と、空間部613の間に差し掛かるロータリスケール51と、ロータリスケール51に設けられ、第1透光部および第1遮光部が交互に形成される位置検出パターン53と、ロータリスケール51に設けられ、第2透光部および第2遮光部が交互に形成され、通過する光量が位置検出パターン53を通過する光量よりも少なくなる汚れ検出パターン54と、フォトセンサ60を移動させて、位置検出パターン53の検出状態と汚れ検出パターン54の検出状態とを切り替えるセンサ位置切替機構70と、を具備している。
(もっと読む)
透明板状部材の歪み検出装置
【課題】透明な板状部材でも、モアレパターンが得られる歪み検出装置の提供。
【解決手段】板状の透明な検査対象物16,17を搭載し得る透明な定盤2を有し、定盤の上下に第1及び第2の基準格子ユニット3,5が対称的に配置されており、各基準格子ユニット3,5は、面発光ユニット3a,5a及び該面発光ユニットの発光面3c,5cに配置された面格子3b,5bをそれぞれ有し、第1の基準格子ユニット3と対向する位置に、第1の基準格子ユニット3の面格子3bの検査対象物16,17からの反射像と、第2の基準格子ユニット5の面格子5bの、定盤2及び検査対象物16,17を透過して来た像を重ね合わせた重畳画像データDATを取得する面格子画像取得手段7を設け、該重畳画像データDATに基づいて、モアレ縞が発生しているか否かを判定して検査対象物16,17の歪みや反りの存在を判定する。
(もっと読む)
穴の内部寸法を計測するための装置
【課題】油田における坑井ボアの内部寸法を計測するための装置において、過酷な環境(高温または高圧)でも、使用に耐えられるものを提供する。
【解決手段】坑井ボアWBの内部寸法を計測するための検層システムLSは、坑井ボアWBの内部に配置されるようになされた検層工具1を備える。検層工具1はセントラライザー5を含み、全体として、検層工具1および下ノーズ5’に連結された複数の機械式アーム6、7等を含む。機械式アーム6、7等は、坑井ボア壁WBWと接触し、検層工具1が正しく位置決めされるように、半径方向に展開するとともに、坑井ボアWBの内部寸法を計測するために使用される光学式センサのカリパーアームを形成する。また、検層工具1は、光ファイバライン2に連結されており、適合した地表ユニット(例えば、車輛3および対応するシステム4)によって坑井ボアWBの内部へ展開される。
(もっと読む)
形状測定方法及び装置並びに歪み測定方法及び装置
【課題】高精度且つ高感度の形状測定を実現できるフリンジ投影法による形状測定方法及び装置、並びに歪み測定方法及び装置を提供する。
【解決手段】光源部11からの光22を格子板12に照射し、格子板12を透過した光23を被測定物14上に格子像として投影し、その格子像を撮影して格子像の歪みから被測定物14の3次元形状を計算して数値化する。三次元形状の数値化は、格子像の画像データ取り込みステップ、取り込んだ画像データの二次元フーリエ変換ステップ、n次のピーク信号取り出しステップ、位相分布を含む信号の逆フーリエ変換ステップ、及び三次元形状数値化ステップをその順で含む。
(もっと読む)
3次元運動特性の測定
【課題】所与の画像フレームレートについてより高速の運動を測定するのに有利に用いることができる3次元運動を測定するシステムおよび方法を提供すること。
【解決手段】物体(5)の3次元運動を測定するシステム(1)は、縞模様の線(11)の断面パターン(18)を有する少なくとも2つの異なる色の光(17)を、別個の時間間隔(TR、TG、TB)で物体(5)の表面(6)上へ投影するようになされた光投影手段(2)を含む。このシステム(1)は、露光時間(TE)中に物体の画像を取り込む画像取得手段(3)も含み、別個の時間間隔(TR、TG、TB)は、露光時間(TE)の期間内にある。このシステム(1)は、画像取得手段(3)の位置から見たときの物体(5)上の縞模様の線(21a〜c)の投影パターンに基づいて色ごとに異なる奥行きマップを得、各色の奥行きマップ上の対応する点を決定し、奥行きマップ上の対応する点の位置に基づいて物体の3次元運動特性を決定するように画像を処理するようになされた画像処理手段(4)をさらに含む。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】基板の高さマップを決定するために使用する時間を短縮する。
【解決手段】測定位置に配置された基板の高さレベルを測定するように構成されたレベルセンサ1が開示される。レベルセンサ1は、基板2の複数の測定位置に複数の測定ビームを投影する投影ユニット3と、基板2で反射した後に測定ビームを受ける検出ユニット4と、検出ユニット4が受けた反射測定ビームに基づいて高さレベルを計算する処理ユニット5とを備え、基板2が測定位置に配置されると、投影ユニット3及び検出ユニット4は基板2に隣接して配置される。
(もっと読む)
21 - 40 / 194
[ Back to top ]