
Fターム[2F065LL41]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 格子 (823)
Fターム[2F065LL41]の下位に属するFターム
回折格子 (629)
Fターム[2F065LL41]に分類される特許
101 - 120 / 194
検査方法および装置、リソグラフィ装置、リソグラフィ処理セル、デバイス製造方法および距離測定システム
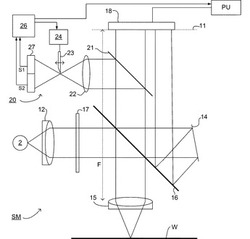
【課題】 例えば、頻繁なオフライン較正を必要としない、および/またはより高速のサーボ応答を実現することができる光焦点または位置センサを提供することである。
【解決手段】 スキャトロメータは、測定されるターゲットが正しい焦点面にあるかどうかを検出するように構成された焦点センサを備える。焦点センサで測定されるようなデフォーカスがある特定の関数に従って変化するように焦点センサまたはスキャトロメータの部品に変調が加えられる。変調についての情報から、センサの利得を計算することができる。
(もっと読む)
精確な測定を有する移動装置
ワークピースを支持する移動装置に関する精確な測定をもつ移動装置は、光学センサ52と、支持板アパーチャ56を規定する支持板54と、支持板54に平行に配置される平面モータ58であって、ワークピース40を支持することが可能な第1の側面60及び支持板54に対向する第2の側面62を有する平面モータ58と、平面モータ58上に配置される2D格子68であって、支持板アパーチャ56を通じて光学センサ52と光学的に通信する2D格子68と、を有する。 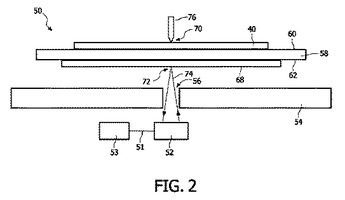 (もっと読む)
(もっと読む)
光切断法による3次元形状測定装置

【課題】光切断法を原理とする3次元形状測定装置に関し、特に、物体に投影するスリット光パターンを液晶素子で作成することにより、紙幣のような3次元的な凹凸検査においてμmオーダーでの高精度な計測を可能としたものである。
【解決手段】白色光源と、該白色光源と測定される物体の間に設けられ該物体の表面にスリット光を投影する液晶素子と、投影レンズとからなるスリット光投影光学系と、撮像レンズと、CCDカメラとからなるスリット光撮像光学系とを備え、画像データ解析手段により取得した前記スリット光で構成される画像データを解析して、物体の3次元座標を算出するようにしたことを特徴とする光切断法による3次元形状測定装置。
(もっと読む)
モアレ縞発生器を適用した位相遷移映写式3次元形状測定装置及びその方法
【課題】モアレ縞発生器を適用した位相遷移映写式3次元形状測定装置及びその方法を提供する。
【解決手段】この装置は、光源(111)及びLED光源(121)の光をそれぞれ用いて格子イメージを生成し、補正面位相と測定対象物(240)の物体位相を獲得できるようにする第1及び第2投影格子(114,124)と、第1及び第2投影格子(114,124)で生成された格子イメージがそれぞれ透過されるようにし、測定対象物(240)の高さ算出のための格子イメージを得るようにする第1及び第2投影部(116,126)と、測定対象物(240)から反射される格子イメージを受光して映像を獲得する映像獲得部(300)と、映像獲得部(300)で獲得された映像に対してアンラッピングされた物体の高さを算出する中央制御部(500)と、を含む。
(もっと読む)
3次元画像データ生成システムおよび生成方法
【課題】3次元画像データを自動的に合成するシステムおよび方法を提供する。
【解決手段】3次元データ取得装置110は、少なくとも3方向から被写体を撮像する計測ヘッド111を備える。3次元データ合成装置120は、3次元データ取得装置110から送信される画像データから3次元画像データを自動生成する装置であって、画像データを送信させる命令を出力するデータ処理部125と、被写体の背景画像を抽出し、抽出された背景画像に基づいて計測ヘッドの位置を算出するとともに、背景画像を除いた被写体のみの画像を抽出し、抽出された画像をフィルタリング処理して特徴画像を抽出し、複数の特徴画像を比較するマッチング処理を行って特徴画像上の同一座標を定め、算出された計測ヘッドの位置などのパラメータ情報と特徴画像上の同一座標の情報とから3次元画像データを自動的に合成する3次元データ合成手段124とを備える。
(もっと読む)
駆動装置およびそれに使用される位置検出装置
【課題】安価で、且つ小型化が可能で、検出精度を向上させた、位置検出装置を提供すること。
【解決手段】位置検出装置は、互いに対向して配置された光学的位置検出素子と位置情報部とから構成される。位置情報部は、可動部が所定の方向へ移動するときに、高光効率部と低光効率部とが交互に繰り返される二値パターンを持つ。位置検出装置は、光学的位置検出素子から得られるパルス信号をカウントすることで、可動部の粗位置を検出する粗位置検出部と、この粗位置検出部で粗位置検出が行われた地点から電気機械変換素子に印加した駆動パルスのパルス数をカウントすることで、可動部の詳細位置を検出する詳細位置検出部と、粗位置を表す粗位置情報と詳細位置を表す詳細位置情報とを合算して、可動部の現在位置を求める合算手段とを有する。
(もっと読む)
形状測定装置及び方法
【課題】撮影と略同時に外乱光を測定することにより、外乱光の影響を可及的に排除して被検物の3次元形状を精度良く測定することができる形状測定装置を提供すること。
【解決手段】被検物4に測定光(パターン光)を照射し、該被検物で反射した光を受光して該被検物の形状を測定する形状測定装置である。前記照射時に前記反射した光を含む前記被検物からの光を検出し、前記照射をしない非照射時に前記反射した光を含まない前記被検物からの光を検出する光検出部(第1光検出部6、第2光検出部10)と、前記光検出部が前記照射時に検出した前記反射した光を含む前記被検物からの光検出成分から前記非照射時に検出した前記反射した光を含まない前記被検物からの光検出成分を除去する演算処理部7と、を備える。
(もっと読む)
非接触測定を行う装置および方法
対象物体を検査するための非接触法および装置。第1の透視位置から撮った、光学的パターンが投影される前記対象物体の少なくとも1つの第1の画像が得られる。第1の透視位置と異なる第2の透視位置から撮った、光学的パターンが投影される対象物体の少なくとも1つの第2の画像が得られる。次いで、少なくとも1つの第1および第2の画像のそれぞれの中の少なくとも1つの共通の対象物体特徴が、少なくとも1つの第1および第2の画像内に画像化されているような光学的パターンの不規則性に基づいて決定される。  (もっと読む)
(もっと読む)
校正用ターゲット、校正支援装置、校正支援方法、および校正支援プログラム
【課題】基準面と撮像ユニットとの位置関係の校正を容易に行う。
【解決手段】基準面に載置された撮影対象の撮影を行う撮像ユニット15に関して、撮像ユニット15の光軸方向を校正するための校正用ターゲット20である。校正用ターゲット20は、基準面との接触面となる底面と、交線が底面と平行である2つの傾斜面とを有している。2つの傾斜面には、底面に正射影したパタンが同じである校正用パタンがそれぞれ形成されている。撮像ユニット15によって撮影された校正用ターゲット20の撮影画像を、画像解析・処理ユニット16は、2つの傾斜面にそれぞれ形成された2つの校正用パタンを認識し、認識した2つの校正用パタンの寸法を算出し、算出した2つの校正用パタンの寸法に基づいて、校正のための校正情報を作成する。
(もっと読む)
三次元形状計測装置、および当該三次元形状計測装置の製造方法
【課題】計測精度を向上させた三次形状元計測装置を実現する。
【解決手段】計測対象に投影された、位置に応じて輝度が変化する縞状の光パタンを解析することによって、計測対象12の三次元形状を計測する三次元形状計測装置10であって、計測対象12が配置され、上記光パタンが投影される計測面52を備えた移動ユニット11と、上記光パタンを計測対象12および計測面52に投影する投光ユニット13と、上記光パタンを画像として読み取る撮像ユニット15とを備え、撮像ユニット15は、計測面52上のある位置W0からレンズ33までを結んだ線分L0W0と計測面52の垂線との間の角度をθp、位置W0から撮像ユニット15までを結んだ線分と上記計測面の垂線との間の角度をθcとする場合に、計測対象となる計測面52の領域内において、tanθc+tanθpを一定に保つように上記光パタンの縞を投影している。
(もっと読む)
三次元形状計測装置、三次元形状計測方法、三次元形状計測プログラム、および記録媒体
【課題】迅速かつ高精度に三次元形状情報を計測できる三次形状元計測装置を実現する。
【解決手段】位置に応じて周期的に輝度が変化する光パタンを、計測対象12が計測される搬送ステージ52上の一部の領域へ投影する投光部20と、光パタン照射領域14を撮像する第1のラインセンサ36と、光パタン非照射領域16を撮像する第2のラインセンサ38と、第1のラインセンサ36が撮像した画像82および第2のラインセンサ38が撮像した画像84から、背景情報を除去した画像86に含まれるある画素における光パタンの位相を、画像86における画素とその周辺の画素との輝度値に基づいて算出し、算出した位相に基づいて計測対象12の高さ情報を算出する画像解析・駆動制御部40とを備え、第1のラインセンサ36および第2のラインセンサ38は、それぞれ、光パタン照射領域14および光パタン非照射領域16を、同時に撮像できるように配置されている。
(もっと読む)
形状測定方法
【課題】多重反射の影響を排除して測定精度を向上させた形状測定方法を提供する。
【解決手段】本発明に係る形状測定方法は、位相シフト法により被検物の三次元形状を測定する形状測定装置を用いた形状測定方法であって、互いに異なる位相を有する縞模様の投影パターンがそれぞれ投影された被検物の複数の画像情報に基づいて、被検物の画像における投影パターンの多重反射の影響を排除する第1のステップ(S101〜S105)と、第1のステップで多重反射の影響を排除した被検物の画像に基づいて、被検物の三次元形状を測定する第2のステップ(S106〜S107)とを有している。
(もっと読む)
形状測定方法および形状測定装置
【課題】被検物の測定手順を自動的に設定して被検物との干渉を防止した形状測定方法を提供する。
【解決手段】本発明に係る形状測定方法は、パターン投影部を利用して投影光より明るい予備投影光を被検物に投影するとともに、撮像部を利用して予備投影光が投影された被検物を撮像し、予備投影光が投影された被検物の画像に基づいて被検物の三次元形状を予備測定する第1のステップ(S101〜S103)と、第1のステップで予備測定した被検物の三次元形状に基づいて、被検物に対する測定手順を設定する第2のステップ(S104)と、第2のステップで設定した測定手順に基づいて、被検物の三次元形状を本測定する第3のステップ(S105)とを有している。
(もっと読む)
ピンホールカメラを有する撮像光学検査デバイス
本発明は、サンプル(5)を検査する撮像光学検査装置に関する。前記検査装置は、照射面内でサンプル表面の指定の部分を非平行光(4)で照射する光源(3)と、前記部分から反射される反射光(4’)の経路及び/又は前記サンプル部分内のサンプル(5)の厚さ全体を通って進む透過光(4”)の経路内に配置された、少なくとも照射面内に延びる少なくとも1つのピンホール(7)と、前記ピンホール(7)を通過する光(4’、4”)の経路内に配置されて前記光(4’、4”)を遮断するように構成された、少なくとも1つの線に沿って光強度分布を感知することが可能な少なくとも1つのスクリーン及び/又は少なくとも1つの位置敏感型検出器システム(8)とを備える。 (もっと読む)
多数の基準面を用いた形状計測方法および形状計測装置
【課題】多数の基準面を格子の投影に利用して、輝度分布が余弦波状でない格子や不等間隔格子でも精度良く形状計測を行い得る形状計測方法および形状計測装置を提供する。
【解決手段】本発明の形状計測装置は、基準面12を含む基準平板11と、基準平板11を法線方向に移動させるステージ13と、平行移動の各位置で格子パターンを投影するプロジェクタ14と、各位置で基準面12に形成される格子を撮影した第1撮影画像と、各位置で基準面12の投影格子を撮影した第2撮影画像と、試料物体17に投影した格子を撮影した第3撮影画像を得るカメラ15と、第1撮影画像の格子および第2撮影画像の投影格子の解析をそれぞれ画素毎に行って、基準平板11の移動量と格子の2次元座標とから成る空間座標と投影格子の位相θとを対応付けたテーブルを形成し、該テーブルと前記第3撮影画像とに基づいて試料物体17の空間座標を求める解析装置16とを備える。
(もっと読む)
多方向映写式モアレ干渉計及びこれを用いた検査方法
【課題】多方向からパターン照明を検査対象物に照射する多方向映写式モアレ干渉計及びこれを用いた検査方法を提供する。
【解決手段】この干渉計は、検査対象物(1)をX、Y方向に移動させるX−Yステージ(10)と、X−Yステージに位置した検査対象物(1)で反射されるパターン映像を撮影する結像部(110)と、パターン照明を照射受けて光経路を変更させて照射する第1回転鏡部(120)並びに第2回転鏡部(130)と、第1並びに第2回転鏡部から夫々照射されるパターン照明を検査対象物に照射する多数の第1並びに第2固定鏡部(140,150、160,170)と、第1及び第2回転鏡部(120,130)にパターン照明を照射させるパターン照明を発生する第1パターン照明発生部(180)と、を有する。
(もっと読む)
面歪の測定装置及び方法
【課題】鏡面乃至半鏡面状の測定対象表面上の、観察可能なあらゆる場所における、面歪の分布を、測定対象の3次元形状の影響を受けることなく、光学的手段を用いて定量的に、また高速・高精度に測定および評価できる、面歪の測定装置及び方法を提供することを課題とする。
【解決手段】複数種の明暗パタンを切替えて表示することが可能なパタン表示手段と、鏡面乃至半鏡面状の測定対象表面上に写る前記パタン表示手段に表示された複数の明暗パタンの鏡像を、撮影する撮影手段と、撮影された複数の明暗パタンの鏡像画像を画像処理して前記測定対象表面の面歪分布を演算する面歪分布演算手段とを備えたことを特徴とする鏡面乃至半鏡面上の面歪の測定装置において、前記測定対象のマクロ3次元形状を測定するマクロ形状測定手段と、測定されたマクロ3次元形状に基づいて、演算された面歪分布を補正するマクロ形状補正手段とを備える。
(もっと読む)
3次元形状計測装置のキャリブレーション方法および3次元形状計測方法
【課題】スリット平面の式を必要とせず、そのためキャリブレーションにおいても精度を要求される設定準備を不要とした容易に行える3次元形状計測装置のキャリブレーション方法およびこれを使用した3次元形状計測方法を提供する。
【解決手段】相互間の距離が既知で撮像部からの距離が異なる複数の平行な平面にスリットパターンが投影された状態を撮像する第1のステップと、各前記平面毎に該スリットパターンの像の位置と形状を表現する式のパラメータを各スリット像毎に計算する第2のステップと、該スリットパターンの像を観測した平面の高さ座標と関連づけて各スリット毎に該パラメータを記憶する第3のステップと、を有する。
(もっと読む)
歪み検査方法および検査装置
【課題】本発明は、例えば平面鏡と曲面鏡をミラー等の反射面の歪みを、従来よりも高精度に検査する方法及び歪み検査装置に関するものであり、歪み量の検査とともに、歪みの方向も検査することができ、又、周辺部においても細かい検査を行うことができる歪み検査方法およびゆがみ検査装置を提供することにある。
【解決手段】前記検査対象に対して複数の平行線パターンを投射する投射手段と、前記投射手段により投射された平行線パターンによって検査対象から反射された反射平行線パターンを読み取る読取手段と、前記読取手段による反射平行線パターンに基づいて作成した測定パターンデータと予め定めた基準パターンデータとを比較演算するデータ処理手段と、前記データ処理手段の結果に基づいて前記検査対象の状態を判定するようにした判定手段を有する。
(もっと読む)
形状測定方法
【課題】正確な表面形状測定を行うことができる形状測定方法を提供する。
【解決手段】本発明に係る形状測定方法は、被検物と撮像光学系との間の光軸方向距離を変化させて、光軸方向距離に応じた複数の被検物の測定画像を撮像取得するステップ(プS101〜S103)と、前記ステップで取得した複数の測定画像に基づいてそれぞれ、被検物の表面の高さを複数算出するステップ(S104)と、前記ステップで複数算出した被検物の表面の高さに基づいて、複数の測定画像の中から、撮像光学系が被検物に対して合焦状態となる光軸方向距離に対応した合焦測定画像を決定するステップ(S105〜S106)と、前記ステップで決定した合焦測定画像に基づいて被検物の表面の高さを算出する第4のステップ(S107〜S108)とを有している。
(もっと読む)
101 - 120 / 194
[ Back to top ]