
Fターム[2F065LL41]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 格子 (823)
Fターム[2F065LL41]の下位に属するFターム
回折格子 (629)
Fターム[2F065LL41]に分類される特許
161 - 180 / 194
反射型光ギャップセンサ
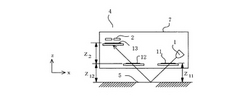
【課題】温度特性の良い反射型光ギャップセンサを実現する。
【解決手段】発光ダイオード1からの射出光は、第1格子11で等ピッチの線状光線に変換され、反射面5を照射する。反射面5からの反射光は、第2格子12で制限され、第3格子上13に像を形成する。検出部6と反射面5間のギャップが変化すると像ピッチが変化する。第3格子13を通して像ピッチの変化に伴う位相変化を検出する。
(もっと読む)
車両の車輪および/または車軸ジオメトリの測定方法
本発明は、光学測定装置を用いた車両の車輪および/または車軸ジオメトリの測定方法に関する。ここでは、場合により基準指標およびボディ指標を考慮して、複数のディジタル画像を形成する少なくとも2つの撮像装置を含む画像記録装置により少なくとも2つの記録位置の相互の対応づけおよび測定空間に対する基準化を行い、種々のパースペクティブから測定すべき車輪を含む対象セクタを検出し、3D測定空間における車輪指標の位置を評価する。本発明によれば、少なくとも2つの撮像装置によって検出された対象セクタから、画像相関処理により、対象セクタの3D表面を表す3Dピクセル群を求め、そこから車輪指標および/または基準指標および/またはボディ指標を取得することにより、迅速かつ正確な測定を行うことができる。 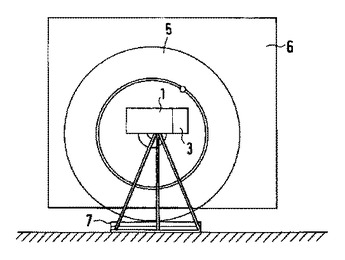 (もっと読む)
(もっと読む)
レベル・センサの光経路中の外乱を補正する方法

【課題】改善した位置測定補正を行って基板の高さを求めるレベル・センサを提供すること。
【解決手段】レベル・センサは、1つ又は複数の測定ビームを生成し、測定ビームを基板上の測定スポットに向け、反射測定ビームを生成する。レベル・センサはまた、1つ又は複数の基準ビームも生成する。検出器は、反射測定ビームと基準ビームの両方をそれぞれ検出し、測定スポットでの高さを示す測定信号と、基準信号をそれぞれ生成する。プロセッサが、これらの信号を受け取り、基準信号に基づいて測定信号を補正する。レベル・センサは、基板を配置すべき場所に近い所定のエリアに光学的構成を有する。測定ビームと基準ビームは、所定のエリア内のほぼ等しい伝播光路に沿って伝播する。光学的構成は、少なくとも1つの基準ビームが基板に当たらないように、所定のエリア内のほぼ等しい伝播光路から基準ビームを偏向させる。
(もっと読む)
構造光画像化装置
【解決手段】本発明は、画像化される対象物の表面トポグラフィを再構成するために、画像化システムに構造光源を組み込む。構造光源は、或る角度から前記対象物上に1組の線を伝達するための機構を備える。それらの線は、マウスなど、限られた高さを有する対象物に当たると、変位、すなわち、位相シフトされる。この位相シフトは、対象物の構造光情報を提供する。カメラが、この構造光情報を取得する。構造光解析を用いるソフトウェアにより、線の位相シフトから、対象物の表面トポグラフィデータが決定される。 (もっと読む)
3次元形状測定装置
【課題】回転テーブルに載置された被写体を撮像してその被写体の3次元形状を測定する3次元形状測定装置において、測定ヘッドによる撮像が可能な撮像可能領域を縮小してその測定ヘッドに課される負担を軽減するとともに、ユーザの使い勝手を向上させる。
【解決手段】被写体Sの3次元形状を測定する3次元形状測定装置10を、(a)回転テーブル184を有する回転テーブルユニットRTと、(b)回転テーブルに載置された状態で被写体を撮像してその被写体の3次元形状を測定する測定ヘッドMHと、(c)その測定ヘッドに装着される一方、回転テーブルユニットを保持する、変形可能なホルダHDとを含むものとする。そのホルダは、自身の変形により、回転テーブルユニットが測定ヘッドに対して展開される展開状態と格納される格納状態とを選択的に実現し、展開状態において、被写体が回転テーブルに載置されて測定ヘッドによって撮像される。
(もっと読む)
試料を結像する際の焦点位置を決定するための方法およびセット・アップ
本発明は、試料(4)を結像する際の焦点位置を決定するための方法に関する。この方法では、試料上に視野絞りを結像し、この画像を、視野絞りに対して傾斜した位置敏感型の受信装置を用いて検出し、受信装置内の強度分布により焦点位置を規定する。本発明は、さらに、本発明による方法の実施に関するセット・アップに関する。本発明によれば、前述の形式の方法において、試料(4)上への視野絞りの結像に、光学格子を少なくとも部分的に重ね、位置敏感型の受信装置を用いて、試料によって反射された光に対する強度値を決定し、これらの強度値を、受信装置内の位置に割り当て、位置に関係づけられた強度値から、位置に関係づけられたコントラスト値を決定し、現在の焦点位置に相当する位置としての受信装置内のコントラスト・フォーカスの位置を、これらのコントラスト値を用いて決定する。 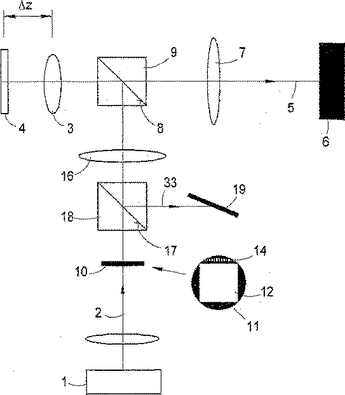 (もっと読む)
(もっと読む)
表面検査装置、表面検査方法、及び基板の製造方法
【課題】 基板の欠陥を、簡便かつ高い精度で検知する。
【解決手段】 基板1の表面を検査する表面検査装置100であって、暗部と明部とを交互に平行に配列させたストライプパターンを、被検査面1aに照射するパターン照射部3と、検知しようとする欠陥の高さと比べて浅い被写体深度で、ストライプパターンが形成された被検査面1aの画像を撮像する撮像部4と、撮像部4により撮像された画像における暗部の像の消失を検知することにより、被検査面上の欠陥を検知する欠陥検知部6とを備える。
(もっと読む)
放射線を放射する要素の位置を測定するシステム及び方法
放射線エミッタの位置を測定するタッチパッドのような方法及びシステムであり、放射線エミッタはスタイラス、ペン、ポインタ等の能動的に放射線を放射するものでも、受動的な放射線を散乱/反射/拡散する要素でもよい。放射線はバーコード要素で変調され、少なくとも1次元のセンサ上に供給される。検出器の出力から、放射線エミッタの位置が測定される。このシステムは、標準的なタッチパッド、壁ないしは黒板やホイワイトボード上で使用するマーカのような外部のエミッタの位置の検出用、又はタッチパッド等の「内部」位置について使用できる。 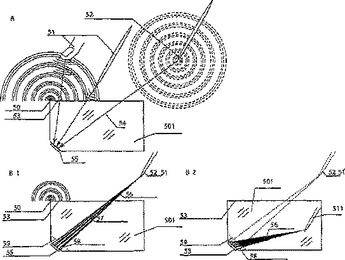 (もっと読む)
(もっと読む)
3次元形状測定方法及び測定装置
【目的】 格子パターン投影法によって、計測対象物体の3次元形状を常に正確に効率よく計測できるようにする。
【構成】 複数の計測対象物体14が設けられた平面15に対して、投影部10によって斜め方向から格子パターンLPを投影し、その格子パターンが投影された平面15を格子パターンの投影方向とは異なる方向から撮像部16によって撮像し、その撮像した明暗のパターンの2次元画像データを画像メモリ19に記憶し、データ処理部17によってそれを解析して計測対象物体14の3次元形状を測定する。投影部10は液晶格子12によって格子パターンを生成する際に、平面15上の特定の計測対象物体14の計測領域以外の領域(マスクエリアMA)に対しては、格子パターンLPを投影しないようにマスクする。
(もっと読む)
棒状体の測定方法
【課題】 リニアイメージセンサの出力から微小径の棒状体の縁部における単色光のフレネル回折パターンを解析して前記棒状体の径を求めるに際し、その誤検出を確実に防ぐことのできる棒状体の測定方法を提供する。
【解決手段】 光路中に位置付けられた棒状体により受光量が低下したリニアイメージセンサにおける受光セルの情報からその遮光領域の幅を求めると共に、上記遮光領域での受光量の総和の情報を求め、この受光量の総和の情報と、この情報に関して予め前記遮光領域の幅に応じて定めた閾値とを比較して、前記遮光領域に前記棒状体の径方向のエッジにおける回折光だけが回り込んでいる計測条件が成立しているか否かを判定する。
(もっと読む)
スキャッタメータを使用するリソグラフィ測定
【課題】リソグラフィ装置およびリソグラフィ装置によって描像されるフィーチャーの最小寸法を予測する方法を提供する。
【解決手段】リソグラフィ装置は、放射線のビームを調整するように構成された照明装置、およびパターニングデバイスを保持するように構成された支持体を含む。パターニングデバイスは、所望のパターンに従って放射線のビームにパターンを形成するように構成される。リソグラフィ装置は、基板を保持するように構成された基板テーブル、およびパターン形成したビームを基板の目標部分に投影して、基板上にパターン形成した像を形成するように構成された投影システムも含む。装置はさらに、ビームの一部を中断し、パターニングデバイスの少なくとも一部を通るビームの透過を測定するように構成され、配置されたセンサを含む。
(もっと読む)
対象物を3次元スキャンするための装置
本発明は、固定した光センサ(3)を通過する対象物を3次元スキャンするための装置であって、当該装置はスキャンすべき対象物を受容する機能を有し、ヘキサポッドとして構成された6脚の対象物キャリア(2)を有する装置に関する。構成の観点から経済的なだけでなく、スキャンプロセスを実行する際の容易な操作を可能にする装置を作るために、対象物がヘキサポッドに担持されたターンテーブル(5)に位置決めされることが発案される。 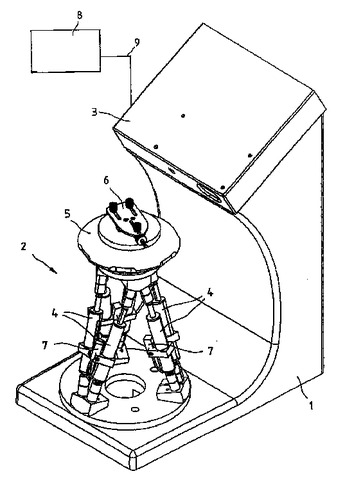 (もっと読む)
(もっと読む)
三次元形状計測システム及び計測方法
【課題】 三次元形状計測装置の台数が増加しても短時間に三次元形状を計測可能で、大規模な形状計測も可能な三次元形状計測システム等を提供する。
【解決手段】 測定対象物107に正弦波格子パターンを投射する格子パターン投射手段101と、格子パターン投射手段を保持しながら、格子パターン投射手段を一定の方向に一定量ずつ移動させる格子駆動手段と、正弦波格子パターンが投射された測定対象物の画像を撮影する画像撮影手段100とを備えた複数台の三次元形状計測装置103〜106を有する三次元形状計測システムにおいて、各々の格子パターン投射手段は、互いに異なる波長の正弦波格子パターンを同時に投射する。投射される格子パターンの波長が異なるため、隣接する装置同士のパターン光が干渉しても三次元形状の計測が可能となり、各三次元形状計測装置が同時に計測することができる。
(もっと読む)
光学測定システムの波長較正のための方法
【課題】偏光解析装置及び分光光度計により算出されるデータと測定値の一致を向上させる。
【解決手段】偏光解析装置及び分光光度計を有する光学測定システムが較正され、先ず偏光解析装置と分光光度計が互いに独立して較正される。次いで、試料の分光光度計の層厚(dphoto)が分光光度計を用いて初めの入射角(θinit)で決定される。次いで、試料の偏光解析装置の層厚(delli)が偏光解析装置を用いて決定される。分光光度計の層厚(dphoto)と偏光解析装置の層厚(delli)の差の絶対値が所定の絶対値より小さくなるまで、初めの入射角(θinit)を変えることにより分光光度計と偏光解析装置が互いに合わされる。
(もっと読む)
三次元計測装置における計測対象物の動き検出方法
【課題】 撮影後に、すばやい目の瞬きや、手先等の非剛体の動きを迅速に検出し、三次元形状計算をする前に使用者にメッセージを出し、計測対象者への負担を軽減することなどを可能とする。
【解決手段】 複数の画像に微分フィルタを適用した後、ある画像領域内で、各画像のエッジ強度の絶対値の差分の絶対値の和を求め、この絶対値の和を、前記画像領域内の複数の画像の一の画像のエッジ強度で除した値を求め、この値が所定の閾値を超えた場合には、画像領域内において計測対象物が動いたと判断する。計測中に手等が動いた時に、その旨計測対象者に知らせることができる。簡単な計算によって、短時間で計測対象者の動きを検出することができる。微分フィルタとして、平滑化微分フィルタ又はソーベル微分フィルタを用いることができ、微分フィルタを適用した後の画像にメジアンフィルタを適用してもよい。
(もっと読む)
3次元計測方法および3次元計測方法をコンピュータに実行させるプログラム
【課題】 パラメータの設定を簡単にでき、ユーザの負担を大幅に軽減できる3次元計測方法および3次元計測方法をコンピュータに実行させるプログラムを提供する。
【解決手段】 観察系の倍率、測定対象物体の最大測定範囲、測定精度と測定速度の度合いのそれぞれについて設定されたパラメータに基づいて液晶格子604の格子ピッチが求められ、該格子ピッチで生成された液晶格子604のパターンを用いて標本3からの変形格子パターン像をTVカメラ13で撮像するとともに、液晶格子604を数段階シフトさせながら各位置毎の撮像画像を取得し、該取得した各位置毎の撮像画像から位相を求めるとともに、該位相と予め用意された前記倍率、最大測定範囲、測定精度と測定速度の度合いに対応する基本位相との差分を用いて高さを求め、この結果を表示部174に表示する。
(もっと読む)
光学素子の幾何学的または光学的構造の絶対的測定方法および実施装置
【課題】光学素子、例えばレンズ、またはそのようなレンズを製造するための型の、幾何学的または光学的構造を絶対的に測定する。
【構成】光学素子4を既知の波面を有する入射光によって照射し、該光学素子4における反射または該光学素子を透過後の前記光の波面スロープのマップを与えられた面で測定装置2によって測定し、その測定したスロープのマップから計算手段3を用いた計算手続きの適用によって、該光学素子の幾何学的または光学的構造を導き出す。計算手段は、解析される該光学素子の面の特性値をその主曲率のマップの形で決定するもので、該光学素子における反射または該光学素子を透過後の前記光の波面のスロープのマップについて複数の方向において導関数を計算し、その導関数から光の波面の曲率を計算し、その曲率から該光学素子の面の主曲率のマップを計算し、該光学素子へ入射する光の波面を知る。
(もっと読む)
振動検出及び振動分析の方法及び装置、並びにこのような装置を装備したリソグラフィ装置
【課題】リソグラフィ装置に関する振動モードと、それらのそれぞれの大きさの尺度とを決定するためのシステム及び方法を提供すること。
【解決手段】投影平面内の画像位置でエアリアル画像を投影し、
エアリアル画像の強度を画像マップにマッピングし、画像マップはサンプル抽出箇所の座標の値とそれぞれのサンプル抽出箇所でサンプル抽出された強度の値とを含み、
スロット・パターンを通して受け取ったエアリアル画像の強度を測定することによって、振動関連情報を決定するための方法。
さらに、この方法は、
画像マップから画像マップの傾斜部分の検出位置を決定するステップ、
この傾斜部分の検出位置で、エアリアル画像の時間的強度を測定しかつスロット・パターンと画像位置との相対位置を測定するステップ、
エアリアル画像の時間的強度から前記エアリアル画像に関する振動関連情報を決定するステップを含む。
(もっと読む)
三次元形状測定方法及び三次元形状測定装置
【課題】 表面形状を短時間で精度良く測定することができる三次元形状測定方法及び三次元形状測定装置を提供する。
【解決手段】 三次元形状測定装置1は、縞パターン照射手段としてのパターン照射ユニット20と、2次元に配置された複数の画素を有するCCDカメラ9と、エッジ点特定用レーザ光源としてのエッジ点特定レーザ出力装置7と、演算処理手段としてのコンピュータ10と、を備える。ガラス2の被測定面2Aに向かって、ライン状(線状)のレーザ光LR1を出射しガラス2の任意の位置にあるエッジを発光させ、その発光したエッジをエ
ッジ点Pとし、該エッジ点Pを基準に各ガラス2の被測定面2Aの表面形状を算出するようにした。
(もっと読む)
検査表面の光学検査
1つの側面においては、強度における決定される変化に基づき、格子の異なる領域において強度データと共に使用される解像度を変化させることにより、Parousiameterのような散乱計100から得られる画像強度データを格納するのに必要なデータの量が削減される。別の側面においては、散乱計が、テストサンプルに対する鏡のオフセンタ変位によりもたらされる歪みを訂正するため、テストサンプル180を画像化する非球面鏡170,900,1000を具備する。別の側面においては、光学表面検査装置が、テスト表面上にパターン化格子1610を投影するため、テスト表面1420と照らし出されるパターン化格子1410との間の補助レンズ1440を用いる。カメラ1450は、実画像としてテスト表面上の格子に焦点が合わされる。 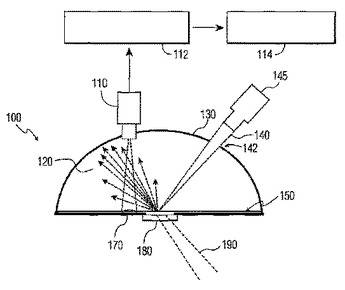 (もっと読む)
(もっと読む)
161 - 180 / 194
[ Back to top ]