
Fターム[2F065LL42]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 格子 (823) | 回折格子 (629)
Fターム[2F065LL42]の下位に属するFターム
FZP (36)
Fターム[2F065LL42]に分類される特許
141 - 160 / 593
干渉測定装置及び干渉測定方法
【課題】測定対象物の移動機構を使用せずに高さ方向のダイナミックレンジを拡大可能とする。
【解決手段】本発明の干渉測定装置は、可干渉距離が有限の光束を生成する生成手段(9、20)と、光束を2つの光束に分岐し、それら2つの光束の一方を測定対象面(25a)へ照射すると共に他方を参照面(24a)へ照射する分岐手段(22)と、測定対象面を経由した測定光束と参照面を経由した参照光束とを同一光路に統合して統合光束を生成する統合手段(22、21)と、分岐手段により分岐される光束の可干渉距離を走査する走査手段(20)と、可干渉距離の走査位置と統合光束の強度との関係を示す関係情報を取得する測定手段(27、30)と、関係情報に基づき、測定光束と参照光束とが干渉する走査範囲と、測定光束と参照光束とが干渉しない走査範囲との境界を、測定対象面の高さ情報として取得する演算手段(30)とを備える。
(もっと読む)
変位測定装置、ステージ装置、露光装置、スケール製造方法、及びデバイス製造方法

【課題】 物体の変位量を高精度に測定可能な変位測定装置を提供すること。
【解決手段】 本発明の一側面としての変位測定装置は、格子パターン6が形成されたスケール7と、スケール7に光を照射する光源と、スケール7の格子パターン6で回折された光を受光する受光素子と、を備える。格子パターン6の形状は、その格子パターン6の格子方向Yに一定の周期で変化している。受光素子は、格子パターン6上の、格子方向Yにその周期の自然数倍の長さを有する領域100で回折された光を受光する。
(もっと読む)
位置計測装置およびそれを用いた露光装置
【課題】 エンコーダシステムを用いた位置計測装置において、計測誤差による影響を低減させることを目的とする。
【解決手段】 対象物を搭載して移動可能な移動体と、前記移動体の位置を計測可能なエンコーダ型の第1の計測手段と、前記第1の計測手段による計測と同時に、前記移動体の位置を計測可能、あるいは前記対象物または前記移動体に形成されたマークの位置を検出可能な第2の計測手段と、前記第1および第2の計測手段の計測結果にもとづいて、前記第1の計測手段の計測誤差を算出し、該計測誤差にもとづいて前記第1の計測手段を補正する補正手段と、を備える。
(もっと読む)
チャックテーブルに保持された被加工物の計測装置およびレーザー加工機
【課題】チャックテーブルに保持された被加工物の上面位置を正確に計測することができる計測装置および計測装置を装備したレーザー加工機を提供する。
【解決手段】発光源61からの光を第1の経路に導くとともに第1の経路を逆行する反射光を第2の経路に導く第1の光分岐手段62と、コリメーションレンズ63によって平行光に形成された光を第3の経路と第4の経路に分ける第2の光分岐手段64と、第3の経路に配設され第3の経路に導かれた光をチャックテーブル36に保持された被加工物Wに導く対物レンズ65と、集光レンズ66と、第4の経路に導かれた平行光を反射して第4の経路に反射光を逆行せしめる反射ミラー67と、第2の経路に導かれた反射光を回折する回折格子69と、回折格子69によって回折した反射光の所定の波長域における光強度を検出するイメージセンサー71とを具備している。
(もっと読む)
変位測定装置、露光装置、及び精密加工機器
【課題】 高精度に物体の変位量を測定可能な変位測定装置を提供することを目的とすること。また、特にそれを具備した露光装置、及び精密加工機器を提供すること。
【解決手段】 変位測定装置200は、格子パターン4が形成されたスケール5と、スケール5に光を照射する光源1と、光源1からの複数の回折光のそれぞれを円偏光に変換する波長板6と、波長板6を透過した複数の回折光を重ね合わせて干渉させる光学素子7と、干渉させた光を受光する受光素子10とを備える。そして、波長板6に入射する複数の回折光が互いに偏光方向の等しい直線偏光になるように、光源1からの光を直線偏光に変換する直線偏光生成手段50を備える。
(もっと読む)
高輝度パルス光源構成
【課題】高輝度パルス光源構成を提供する。
【解決手段】高輝度光源構成は、長寿命を有し高速度で変調することができる。本構成は、アクチュエータに取り付けられた可動部材と、可動部材に関連する発光蛍光体領域と、放射光出射領域に対し固定された点において発光蛍光体領域を照射する入射光源と、可動部材アクチュエータと入射光源を制御する光源制御装置と、を含む。入射光源(例えばレーザー)は照射スポットに高輝度入射光を供給し、発光蛍光体領域に高輝度出射光を放射させる。発光蛍光体領域は消光と光退色を低減するように照射スポットに対して動かされ、これにより光源構成の寿命を延ばす。蛍光体領域は広帯域光を放射することができる、および/またはそれぞれのピーク波長を放射する蛍光体を有するそれぞれのサブ領域を含むことができる。
(もっと読む)
距離に基づく検知
特定の距離または奥行き状況での使用に合わせた構造化光のパターンを投影することが可能な測距機器。場面内の検出された光点は、たとえばスマートフォンまたはPDAとのインターフェースとしての、単純で低コストのジェスチャ認識システムを提供するために、所定のパターンテンプレートと比較されることが可能である。構造化光発生器は、タイミング制御にしたがって自動的に、または照射された場面からの検知情報に応じて適応的に、前記第一および第二構造化パターンの間を前後に切り替わるようになっていてもよい。あるいは、構造化光発生器は、第一および第二パターンを同時に投影するようになっていてもよい。個別の光発生器が異なるパターン向けに採用されてもよく、あるいは部品が共有されてもよい。  (もっと読む)
(もっと読む)
三次元撮像装置および物体の三次元画像の生成方法
【課題】三次元の物体の画像を生成する三次元撮像装置を提供する。
【解決手段】3D撮像装置101は、2組103a,103bの反射素子105と、撮像素子107と、プロセッサとを有する。撮像素子107は、物体111から発せられ、かつ2組103a,103bの反射素子105のそれぞれから反射された光線を用いて、2つの画像を取得する。プロセッサは、取得した画像のそれぞれにおける複数組のマッチングポイントを特定するように構成される。マッチングポイントの各組は、物体111の対応する単一の要素により発せられた個々の光線により生じたものである。また、プロセッサは、取得した画像のそれぞれにおける複数組のマッチングポイントの各組ごとに、物体111の対応する要素の位置を決定するように構成される。したがって、プロセッサは、物体111の複数の要素の決定された位置を用いて、物体111の3次元画像を生成することができる。
(もっと読む)
露光装置及びデバイス製造方法
露光装置は、第1方向に延在するカ゛イト゛部材を有し、第1駆動装置の駆動により第1方向と略直交する第2方向に移動する第1移動体と、カ゛イト゛部材に沿って第1方向に独立して移動自在に設けられ、第1移動体の移動によりカ゛イト゛部材とともに第2方向に移動する一対の第2移動体(WCS)と、物体(W)を保持するとともに、一対の第2移動体により、少なくとも第1方向、前記第2方向を含むとともに光学系の直下の第1位置を含む二次元平面内で移動自在に支持される保持部材(WFS)と、一対の第2移動体に対して第2方向に沿って隣接して配置され、第1駆動装置の少なくとも一部を共用する第2駆動装置の駆動により、一対の第2移動体に支持された保持部材とともに第2方向側の端部で近接又は接触した状態を維持して第2方向に平行な方向に移動して、保持部材上の物体と光学系との間に液体が保持される第1の状態から、光学系との間で液体を保持する第2の状態に遷移させる液体保持部材(MST)と、を有する。 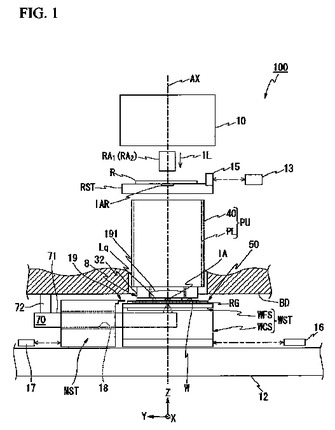 (もっと読む)
(もっと読む)
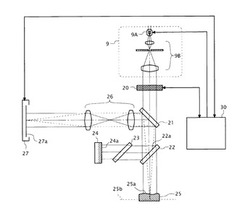
斜入射干渉計
【課題】高度な技術や、高価なレーザ光源を要することなく、干渉縞感度を変更することができる斜入射干渉計の提供。
【解決手段】斜入射干渉計1は、レーザ光源2と、第1回折格子3と、第2回折格子4とを備える。レーザ光源2は、出射するレーザ光の波長を変更できる波長可変レーザ光源で構成されている。第1回折格子3は、レーザ光源2から出射されるレーザ光を参照光、及び測定光に分離するとともに、測定光を被測定面Wに対して斜めに出射する機能を有している。第2回折格子4は、第1回折格子3にて分離される参照光、及び被測定面Wにて反射される測定光を合成して干渉光とする機能を有している。
(もっと読む)
リソグラフィ装置及びデバイス製造方法
【課題】代替のエンコーダタイプの位置測定システムを提供する。
【解決手段】他のオブジェクトに対する可動オブジェクトの位置を測定する位置測定システムが、可動オブジェクト及び他のオブジェクトのうちの一方に取り付けられ、それぞれが測定方向に沿って測定ビームを放出することができる2つ以上の一次元(1D)エンコーダヘッドと、可動オブジェクト及び他のオブジェクトのうちの他方に取り付けられ、それぞれの基準ターゲットが2つ以上の一次元(1D)エンコーダヘッドと協働するグリッド又は回折格子を有する平面を含む1つ又は複数の基準ターゲットと、2つ以上の1Dエンコーダヘッドの出力に基づいてオブジェクトの位置を計算するプロセッサとを含み、2つ以上の1Dエンコーダヘッドそれぞれの測定方向は、それぞれの基準ターゲットの平面に対して非垂直である。
(もっと読む)
ステージ装置、露光装置、駆動方法及び露光方法並びにデバイス製造方法
駆動系により、アーム部材(71)から移動体(WFS)のXY平面に平行な一面に配置されたグレーティング(RG)に対して計測ビームを照射して移動体のXY平面内の位置を計測する第1計測系の計測結果と、レーザ干渉計を用いてアーム部材(71)の形状変化を計測する第2計測系の計測結果と、に基づいて移動体が駆動される。駆動系は、第1計測系の計測結果に含まれるアーム部材の形状変化に起因する計測誤差を、第2計測系の計測結果を用いて補正する。 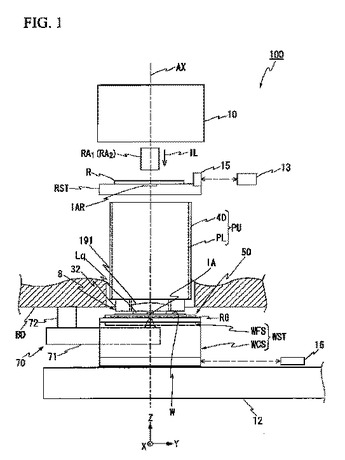 (もっと読む)
(もっと読む)
可動物体の位置依存信号を測定するための測定システム、リソグラフィ装置および方法
【課題】測定精度が可動物体の動作によって実質的にほとんど影響されない、可動物体の位置依存信号を測定するように構成された好ましくはエンコーダ型高精度測定システムを提供する。
【解決手段】エンコーダ型測定システムは可動物体の位置依存信号を測定するように構成され、可動物体の上に取付け可能な少なくとも1つのセンサと、実質的に静止したフレームの上に取付け可能なセンサターゲットと、実質的に静止したフレームの上にセンサターゲットを取付けるように構成された取付けデバイスとを含む。実質的に静止したフレームに対するセンサターゲット物体の移動および/または変形を補償するように構成された補償デバイスをさらに含む。補償デバイスは受動型または能動型制振デバイスおよび/またはフィードバック位置制御システムを含むことができる。代替の実施形態において、補償デバイスは、センサターゲット物体の位置を固定する把持デバイスを含む。
(もっと読む)
原位置における極薄の光学膜の厚さデータ決定のための方法およびシステム
薄膜の厚さに関するデータ(例えば、厚さ変化)は、以下の通りに本願明細書において決定される。前記膜および基板が、全体において、干渉計構造を形成するように、前記膜は基板上に配置される。その光放射線が膜および基板によって形成される干渉計構造の方へ発されて、前記干渉計構造から光学的に反射された後、放射線は測定される。前記薄膜の厚さ関連のデータ(例えば、厚さ変化)は、その後、スペクトル関連の情報の中で、例えば、前記光学的に反射された放射線によって決定される。 (もっと読む)
光ファイバセンサ
【課題】溶接部などの局所的な歪を近傍域内で測定するのに適した態様でFBG形成済み光ファイバを組み込む。
【解決手段】周面が形成された巻付部材11と、周面が形成された巻付部材12と、両巻付部材11,12の各周面に巻き付けられており両巻付部材間に張られた部分にFBG5aが形成されている光ファイバ5と、被測定物の歪発生部3の両側に分かれて固設され一方側1で巻付部材11を支持し他方側2で巻付部材12を支持する支持部13〜15とを備える。光ファイバ5の巻き方は巻付部材11,12で逆巻きにする。
(もっと読む)
三次元画像を撮影するための方法
本発明は、重複する撮影領域を有する2つのカメラ(1a、1b)を用いて対象物の三次元画像を撮影するための方法に関し、較正プロセスの過程において、前記各カメラ(1a、1b)に対してそれぞれ、相互に属するエピポーラ線群を求める。予め設定されたランダム画像(40)を、撮影されるべき対象物(30)上に投影する。カメラの各ピクセルに対して、第1の周辺区域(13a)を特定し、属する第1のエピポーラ線(9a)を特定し、当該第1のエピポーラ線(9a)に対して、第2のカメラ(1b)の対応する第2のエピポーラ線(9b)を特定する。前記第2のエピポーラ線(9b)上に位置する、前記第2のカメラ(1b)の画像の全ピクセル(8b)に対して、第1の周辺区域に対して合同の第2の周辺区域(13b)を特定する。第1のおよび第2の周辺区域(13a、13b)の強度値を相互に比較し、一致度を形成する。一致度が最大である、第2のエピポーラ線(9b)上の画像位置(14)を特定する。事前に特定されている変換によって空間位置(17)を特定する。三次元画像は、このようにして求められた空間位置(17)を含む。 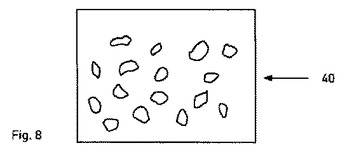 (もっと読む)
(もっと読む)
露光装置及びデバイス製造方法
【課題】ウエハを保持するステージを高精度で駆動する。
【解決手段】 微動ステージWFS1と微動ステージWFS1を支持する粗動ステージWCS1とにより囲まれる空間内に位置決めされる計測アーム71Aがエンコーダヘッドを有し、該ヘッドにより微動ステージWFS1に設けられたグレーティングRGに計測ビームを照射し、グレーティングRGからの戻りビームを受光する。ヘッドの出力に基づいて、微動ステージ位置計測系が微動ステージWFS1の位置情報を計測する。計測アーム位置計測系72A0が、計測アーム71Aの光軸AXに対する相対位置情報を計測する。従って、微動ステージ位置計測系と計測アーム位置計測系72A0との計測結果に基づいて、光軸AXを基準とする微動ステージWFS1の位置情報を高精度で計測する。
(もっと読む)
オートコリメータを用いた光学素子の偏心調整方法及び偏心測定方法、並びにレンズ加工方法
【課題】オートコリメータを使用したレンズの偏心測定精度を改善する。
【解決手段】オートコリメータ100を用い、かつ光軸を有する光学素子1を回転させて上記光学素子における上記光軸と回転軸との偏心を調整する偏心調整方法であって、光源130が発する光束から回折光学素子112によりそれぞれ異なる次数の回折光131,132を上記光学素子の光学作用面1a及びフランジ面1cに照射し、受光部120で検出された検出結果から、上記光学作用面における光軸と上記光学素子の上記回転軸とが一致するように上記光学素子を位置決めする。
(もっと読む)
三次元干渉顕微鏡観察
【課題】 三次元干渉顕微鏡観察を提供する。
【解決手段】 サンプル内にあるスイッチャブル光源のうち統計的に散在するサブセットが活性化され、活性化されたスイッチャブル光源が励起され、それにより、光ビームが、少なくとも2つの光路に沿って、活性化されたスイッチャブル光源から放出される。活性化されたスイッチャブル光源から第1の光路に沿って放出される第1の光ビームでの第1の波面修正が導入され、活性化されたスイッチャブル光源から第2の光路に沿って放出される第2の光ビームでの第2の波面修正が導入され、第2の波面修正が、第1の波面修正とは異なる。第1および第2の光ビームが、互いに干渉されて、複数の出力ビームを生成し、光源の三次元位置情報が、複数の出力ビームからの各出力ビームの強度に基づいて決定される。
(もっと読む)
表面輪郭測定のための装置および方法
【課題】オブジェクト表面上のポイントの三次元位置情報を測定する好適な装置および方法を提供すること。
【解決手段】一実施形態において、上記方法は、スペクトル分布を有する2つの放射ソースを提供する工程と、上記ソースの各々で上記表面を照射して第1の縞パターンを生成する工程と、上記第1の縞パターンを第2の位置に移動させる工程と、第1のラップされたサイクルマップを生成する工程と、該第1の縞パターン中の縞数を推定する工程と、該第1の縞パターンを変化させる工程と、該第2の縞パターンを第2の位置に移動させる工程と、第2のラップされたサイクルマップを生成する工程と、該第2の縞パターン中の縞数を推定する工程と、上記第2の縞パターンおよび上記第2のラップされたサイクルマップ中の推定された縞数に応答して位置情報を判定する工程とを含む。
(もっと読む)
141 - 160 / 593
[ Back to top ]