
Fターム[2F065LL42]の内容
光学的手段による測長装置 (194,290) | 光学系 (17,149) | 格子 (823) | 回折格子 (629)
Fターム[2F065LL42]の下位に属するFターム
FZP (36)
Fターム[2F065LL42]に分類される特許
161 - 180 / 593
計測装置、露光装置およびデバイス製造方法
【課題】エンコーダシステムを用いたステージを位置決めする場合、スケール間に存在する幾何学的誤差に起因する計測誤差を低減する。
【解決手段】可動体に配置された複数のセンサと、構造体に取り付けられた複数のスケールとを有し、前記可動体の変位を検出することによって前記可動体の位置を計測する計測装置であって、前記複数のスケールは、第1方向における前記可動体の変位を検出するための2つの第1スケールと、前記第1方向とは異なる第2方向における前記可動体の変位を検出するための2つの第2スケールとを含み、2つのセンサによる検出値とが等しくなるように前記可動体を前記第1位置から前記第2位置に移動させたときに前記2つの第1スケールに対向している2つのセンサによってそれぞれ検出される変位の間の差に基づいて、前記2つの第1スケールの間に存在する幾何学的誤差に起因する計測誤差を低減する制御部とを備える。
(もっと読む)
表面輪郭測定のための装置および方法

【課題】オブジェクト表面上のポイントの三次元位置情報を測定する好適な装置および方法を提供すること。
【解決手段】一実施形態において、上記方法は、スペクトル分布を有する2つの放射ソースを提供する工程と、上記ソースの各々で上記表面を照射して第1の縞パターンを生成する工程と、上記第1の縞パターンを第2の位置に移動させる工程と、第1のラップされたサイクルマップを生成する工程と、該第1の縞パターン中の縞数を推定する工程と、該第1の縞パターンを変化させる工程と、該第2の縞パターンを第2の位置に移動させる工程と、第2のラップされたサイクルマップを生成する工程と、該第2の縞パターン中の縞数を推定する工程と、上記第2の縞パターンおよび上記第2のラップされたサイクルマップ中の推定された縞数に応答して位置情報を判定する工程とを含む。
(もっと読む)
計測システムおよび計測方法
様々な計測システムおよび計測方法が提供される。 (もっと読む)
メトロロジ方法および装置、リソグラフィ装置、リソグラフィプロセシングセル、およびメトロロジターゲットを備える基板
【課題】より小さいターゲット上のより正確な測定 を行うことができる、改善されたメトロロジ方法および基板上の複数のターゲットの特性を測定するように構成されたメトロロジ装置等を提供する。
【解決手段】メトロロジ装置を配置してオフアクシス照明モードで複数のターゲットを照明する。1つの1次回折ビームのみを用いてターゲットのイメージを得る。ターゲットが複合格子である場合、回折格子のイメージの強度からオーバーレイ測定値を得ることができる。イメージフィールド内の格子の位置変動に起因するエラーについてオーバーレイ測定値を補正することができる。
(もっと読む)
タッチセンサー式及び物体センサー式ディスプレイのための照明
統合された視覚及び表示システムは、表示面を通じて見るために表示画像を送信するように構成された表示画像形成層と、表示面の法線に対して狭い範囲の角度の、表示面上又は表示面の近くの1つ以上の物体からの反射を含む、赤外光を結像するように構成された結像検出器と、物体を照らすために赤外光を放射するように構成された視覚システムエミッターと、対向する上面及び/又は下面を有し、視覚システムエミッターから赤外光を受信し、上面及び下面からTIRによって赤外光を導き、表示面の法線に対して狭い範囲の角度の外側の物体上へ赤外光を投影するように構成された、可視光及び赤外光を伝達可能な導光路とを具備する。  (もっと読む)
(もっと読む)
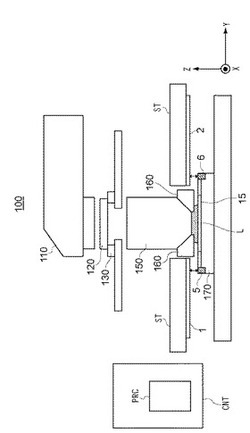
傾斜センサ、それを備えた加工装置及びワーク加工方法
【課題】測定面の傾斜量を高精度に測定する。
【解決手段】光源1より測定面2へ照明光20を照射し、その反射光を回折格子8に入射させる。回折格子8より生じる±1次の回折光22は光学ユニット3の一対の回折格子9に入射し、測定面2の傾斜量に応じた光路差を持つ2つの回折光23を生じる。各回折光23を集光光学素子10により受光素子4に集光させると、上記光路差により干渉光を生じる。この干渉光の強度変化を測定することで上記光路差を求めて、測定面2の傾斜量を計算する。
(もっと読む)
チャックテーブルに保持された被加工物の計測装置およびレーザー加工機
【課題】被加工物の上面高さを計測する計測装置および計測装置を装備したレーザー加工機を提供する。
【解決手段】被加工物Wに向けて白色光を発光する白色光源61と、発光した光が有する各波長を回折する回折手段62と、回折された光の中央部を遮蔽して光を環状に形成するマスク手段63と、形成された環状の光の像をリレーするリレーレンズ64と、伝達された環状の光を集光して被加工物に照射する対物レンズ65と、マスク63手段とリレーレンズ64との間に配設され被加工物に照射された光の反射光を分光するビームスプリッター66と、分光された反射光における光軸を通る波長の反射光を通過させる光分別手段67と、通過した反射光を回折光に変換する回折格子68と、回折された回折光の波長を検出する波長検出手段69と、波長検出手段69からの波長信号に基いて被加工物Wの高さ位置を求める制御手段とを具備している。
(もっと読む)
誘電体形状の非接触測定用プローブ及び非接触測定装置
【課題】微小穴の内径等の微細形状の測定に際して、測定の非接触化による高精度化を図ると共に、光量変化の検出という単純な検出原理によるシステムの簡素化、低価格化を図る。
【解決手段】側面がセンシング面12Bであるコア12のみで構成され、該コア12の端面12A、または、前記センシング面12Bとコア端面12Aとの間の該コア12内、もしくは該コア端面12Aの外側の少なくともいずれか一つに反射面を有する光ファイバ10を備え、前記センシング面12Bへの誘電体ワーク16の近接により生じる、前記光ファイバ10に入射され、前記反射面で反射されて戻ってきた光の減衰を検出する。
(もっと読む)
欠陥検査装置およびその方法
【課題】高スループットかつ高感度の欠陥検査装置を提供すること。
【解決手段】広帯域波長の照明を用いて結像性能を向上させることが有効である。そこで、従来の屈折型光学系より広帯域波長の照明が使用可能な反射型光学系を用い、更に良好な収差状態を得られるレンズ外周部の円弧形状のスリット状視野にする。しかしこの方式は、受光面での各検出画素寸法の違いによる明るさの差と、センサの出力配列を視野内の位置座標に対応付けることが課題である。課題を解決するために、明るさの差及び座標を画素位置に応じて個別に補正する。
(もっと読む)
パターン形状計測方法、半導体装置の製造方法、およびプロセス制御システム
【課題】半導体デバイスの微細化に対して、プロセスマージンが狭小な場合でも半導体パターンの形状計測を高精度で行うことができるパターン形状計測方法を提供する。
【解決手段】パターン形状計測方法において、ベストマッチとなる計算波形が選出不可能な場合は、形状パラメータの内、少なくとも1つのパラメータを、パターン形状計測に依らない計測方法を用いる他計測装置にて得られた情報に基づいて固定値とし、再度、ライブラリと検出波形のマッチングを行い、ベストマッチとなる計算波形を選出するステップと、ベストマッチした計算波形より対象パターンの形状情報を求める。
(もっと読む)
リソグラフィ用の検査方法
【課題】プロダクトフィーチャと同じ感度を受けるオーバーレイエラーを決定する方法を提供する。
【解決手段】オーバーレイエラーの決定に用いるマークはサブフィーチャ(46)を含んでおり、このサブフィーチャはプロダクトフィーチャの最も小さいピッチとほぼ同等である最も小さいピッチを有する。これにより、歪みおよび収差に対する感度はプロダクトフィーチャのものと同じになる。しかしながら、マークが現像されるとサブフィーチャは組み合わされ、より大きいフィーチャの輪郭のみが現像される。
(もっと読む)
多点変位検出装置
【課題】
多点で変位を同時に光学的に行おうとした場合、各種光学式変位計を多数用いる方法で多点の同時変位検出を行うことができるが、各センサはそれぞれ、レーザ等の光源、投射レンズ、受光レンズ、受光素子、処理回路、電源等を持ち、また、各センサの出力を受けるための多チャンネルAD回路や出力を処理するコンピュータおよびソフトウエアが必要であり、センサの数が多くなるほど非常に高コストになっていた。
【解決手段】
一端に色収差をもつレンズを備えた光ファイバと、他端に、一本が光源につながり、もう一本が検出器につながる光ファイバを備えた光ファイバカプラとを備えた多数のプローブと、多数のプローブの光源側の光ファイバを並べ、白色光または複数波長光を投入する光源と、多数のプローブの検出器側の光ファイバを並べ、そこに対向配置したカラーカメラとを備える多点変位検出装置とした。
(もっと読む)
干渉法により二次元光路分布の絶対測定を行う装置
二次元光路分布の絶対測定を行う装置であって、本装置は、複数の波長を有する光を物体(26)に照射する光源(4)と、物体の少なくとも一部分の画像を形成する干渉計(12)であって、この少なくとも一部分の画像は広帯域干渉図形を含む、干渉計(12)と、干渉計と光通信を行い、広帯域干渉図形を複数の狭帯域二次元干渉図形(72、74、76)にスペクトル的に分離するハイパースペクトル撮像装置(30)と、狭帯域干渉図形を空間的に位置合わせする位置合わせ装置(38)と、各狭帯域干渉図形内の対応する画素から一次元強度信号を抽出する抽出装置と、物体上の各点における周波数を、各点に関連付けられた一次元強度信号から計算する計算装置(100)と、を含む。 (もっと読む)
露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 移動体RSTのY軸方向の位置情報を、干渉計16yと、該干渉計に比べて計測値の短期安定性が優れるエンコーダ((24A,26A1)、(24B,26B1))とを用いて計測し、その計測結果に基づいてエンコーダの計測値を補正する補正情報を取得するための所定の較正動作を実行する。これにより、干渉計の計測値を用いて、その干渉計に比べて計測値の短期安定性が優れるエンコーダの計測値を補正する補正情報が取得される。そして、エンコーダの計測値と前記補正情報とに基づいて、移動体をY軸方向に精度良く駆動する。
(もっと読む)
移動体装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】 粗微動ステージにおいて、微動ステージの位置を高精度に計測する。
【解決手段】 粗動ステージWCSに保持された微動ステージWFSのXY平面内での位置情報の計測には、微動ステージのXY平面に実質的に平行な一面に配置されたグレーティングRGに対向して配置され、該グレーティングに計測ビームを照射するヘッドを含むエンコーダシステムが用いられる。そして、微動ステージは、駆動系によって、エンコーダシステムで計測された位置情報に基づいて、単独で、若しくは粗動ステージと一体で駆動される。この場合、エンコーダシステムのヘッドを微動ステージ(グレーティング)に近接して配置することができ、これにより、エンコーダシステムによる微動ステージの位置情報の高精度な計測が可能になる。
(もっと読む)
移動体装置、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体の位置情報を高精度で計測する。
【解決手段】 露光ステーション200では、ウエハを保持するステージWFS1の位置情報は、計測アーム71Aを含む第1の微動ステージ位置計測系により計測され、計測ステーション300では、ウエハを保持するステージWFS2の位置情報は、計測アーム71Bを含む第2の微動ステージ位置計測系により計測される。露光装置100は、ステージWFS2が計測ステーション300から露光ステーション200へ搬送される際、このステージWFS2の位置情報を計測可能な第3の微動ステージ計測系を有する。第3の微動ステージ計測系は、複数のYヘッド96,97を含むエンコーダシステムとレーザ干渉計76a〜76dを含むレーザ干渉計システムとを含む。
(もっと読む)
移動体装置及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 駆動系により、アーム部材71から移動体WFSのXY平面に平行な一面に配置されたグレーティングRGに対して計測ビームを照射して移動体のXY平面内の位置を計測する第1計測系の計測結果に基づいて移動体が駆動される。この場合、アーム部材からグレーティングRGに計測ビームを照射する構成が採用されているので、ステージ定盤にエンコーダシステムを設ける場合とは異なり、移動体の駆動に起因する悪影響はない。従って、移動体を精度良く駆動することが可能になる。
(もっと読む)
露光装置及び露光方法、デバイス製造方法、並びに搬送方法
【課題】大型化したウエハの搬送を容易にする。
【解決手段】 露光装置は、XY平面に沿って移動可能であるとともに、互いに接近及び離間が可能な第1部分と第2部分とを含む粗動ステージWCS1と、ウエハWを保持するとともに、粗動ステージWCS1によって少なくともXY平面内で相対移動可能に支持される微動ステージWFS1と、粗動ステージWCS1に支持されている微動ステージWFS1を単独で若しくは粗動ステージWCS1と一体で駆動する駆動系と、を備える。また、露光装置は、粗動ステージWCS1との間で、微動ステージWFS1の受け渡しが可能なリレーステージDRSTを備えている。
(もっと読む)
移動体装置及び移動体駆動方法、露光装置及び露光方法、並びにデバイス製造方法
【課題】移動体を精度良く駆動する。
【解決手段】 駆動系により、アーム部材71から移動体WFSのXY平面に平行な一面に配置されたグレーティングRGに対して計測ビームを照射して移動体のXY平面内の位置を計測する第1計測系の計測結果と、レーザ干渉計を用いてアーム部材71の変動を計測する第2計測系の計測結果と、に基づいて移動体が駆動される。この場合、駆動系は、第1計測系の計測結果に含まれるアーム部材の変動に起因する計測誤差を、第2計測系の計測結果を用いて補正する。
(もっと読む)
露光装置、露光方法及びデバイス製造方法
ウエハステージ(WST1,WST2)の位置情報は、定盤(14A、14B)の下方に配置された計測バー(71)が有する、複数のエンコーダヘッド、Zヘッドなどにより、微動ステージ(WFS1,WFS2)の下面に配置されたグレーティングを用いて、計測される。従って、ウエハステージ(WST1,WST2)の位置情報の高精度な計測が可能となる。また、ウエハステージのガイド面が所定のクリアランスを介して並べて配置された2つの定盤(14A,14B)によって形成されているので、定盤が一体である場合に比べて、1つ1つの定盤の取り扱いが容易になるとともに、定盤近傍のメンテナンスなどが容易になる。 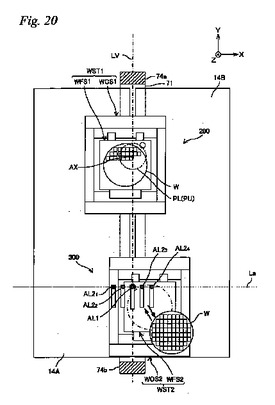 (もっと読む)
(もっと読む)
161 - 180 / 593
[ Back to top ]