
Fターム[2F065MM06]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 相対移動によるもの (3,117) | 測定器全体の移動 (874)
Fターム[2F065MM06]の下位に属するFターム
Fターム[2F065MM06]に分類される特許
1 - 20 / 205
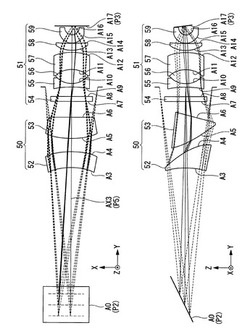
形状測定装置、構造物製造システム、構造物製造方法
【課題】計測精度を向上する。
【解決手段】形状測定装置は、光源からの光に照らされている被検物を撮像する撮像素子と、撮像素子の受光面(A17)と共役な共役面(A0)を受光面と非平行になるように形成する結像光学系と、撮像素子による撮像の結果から光に照らされている部分の像の位置を検出することにより、被検物の形状に関する情報を取得する形状情報取得部と、を備える。結像光学系は、像を形成する光束が通る範囲において、受光面を含む面と共役面を含む面との交線に直交する直交面上の像面の略中心と物体面の略中心とを直線で結んだときの軸に関して断面形状が非対称であり、かつ交線から最も遠い部分と、交線から最も近い部分とについて、遠い部分から近い部分に向うにつれて直交面上の断面形状の寸法が縮小又は拡大するレンズ要素(52、53)を含むレンズ群(50)を有する。
(もっと読む)
単眼カメラ画像によるステレオ視に基づく運動量推定方法、及び当該方法を使用する運動量推定装置

【課題】単眼ステレオ視に基づく運動量推定を実施するに当たり、演算負荷を軽減しつつ、運動量及び三次元座標を高精度に算出する方法を提供する。
【解決手段】単眼カメラによって撮像された画像を用いるステレオ視に基づく運動量推定を行うに当たり、個々のオプティカルフローの向きを考慮して、異なる向きを有するオプティカルフローを形成する特徴点を効率的にサンプリングして基礎行列の算出に用いる。具体的には、基礎行列の算出に用いるオプティカルフローを形成する特徴点のサンプリングにおいて、サンプリングされた特徴点をオプティカルフローの向きに基づいて所定数のグループに振り分け、複数の特徴点が振り分けられたグループについては特徴点を1つに収束させ、特徴点が振り分けられなかったグループについては改めて特徴点を選択する処理を繰り返して、全てのグループに特徴点が1個ずつ属する状態とし、これらの特徴点に基づいて基礎行列を算出する。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】計測精度を向上させることができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、計測対象物を撮像したカメラの姿勢と、物体を撮像した仮想的なカメラの姿勢とが近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。また、CPU34cは、これら2種類のカメラの光学系または撮像素子の特性が互いに近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。CPU34cは、これらの調整を行った後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
熱源位置角度検出方法
【課題】熱源の大きさが赤外線カメラ1画素の検出範囲よりはるかに小さな場合であっても、赤外線カメラの画素数を増やすことなくカメラから熱源までの位置角度を精度良く求める。
【解決手段】検出範囲の最も赤外線カメラから遠くにあり、1画素の検出範囲よりもはるかに小さな熱源であっても、赤外線カメラのレンズの焦点をずらし、3画素に赤外線が入射させ3画素が出力するデータの大小を比較することにより精度の高い熱源の角度検出を行う。
(もっと読む)
移動環境認識装置及び方法
【課題】高精度に測定対象の形状認識情報を得る。
【解決手段】測定対象までの距離画像データを得る距離画像測定工程ステップST1と、この距離画像測定工程で得た距離画像データに基づき、所定のデータの集合体からなるラベリング領域を作成するラベリング処理工程ステップST2〜ステップST7と、このラベリング処理工程で作成した複数のラベリング領域に基づいて複数の上面データを形成する上面データ形成工程ステップST8と、この上面データ形成工程で形成した複数の上面データに基づいて測定対象の形状を認識する形状認識工程ステップST9〜ステップST13と、を備えた移動環境認識方法である。
(もっと読む)
バリ取り方法
【課題】より適切なバリ取りを行うことができるバリ取り方法を提供する。
【解決手段】バリ取り方法は、ワーク上のバリの形状を計測する計測工程(S1、S2)と、計測工程で得られた計測値に基づき、バリの長さ方向に沿って所定の根元算出点における両側の根元位置を算出する根元算出工程(S3〜S11)と、根元算出工程で得られた根元位置に基づいてバリ取り工具の軌道を算出する軌道算出工程と、軌道算出工程で得られた軌道に従ってバリ取り工具を移動させながらバリ取り加工を行うバリ取り工程とを備える。
(もっと読む)
3次元位置・姿勢認識装置およびその方法、プログラム
【課題】本発明は、対象体本来の形状のうち部分的な形状の情報を欠いた計測点群を用いる場合であっても、対象体の3次元位置・姿勢を適切に認識可能な3次元位置・姿勢認識装置およびその方法、プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、計測点群と、対応するモデル点群とをマッチングさせ、モデル点群のうち、マッチング結果に基づいて特定される点を削除処理するモデル処理手段10と、計測点群と、モデル処理手段10において削除処理したモデル点群とをマッチングさせ、対象体3の3次元位置・姿勢を認識する認識手段11とを備えることを特徴とする。
(もっと読む)
有関節座標計測機再配置方法
【課題】隠れ点を計測できるという有関節CMMの便利さと、より広い空間を計測できるというレーザトラッカの利点とを併せ実現する有関節座標計測機再配置方法を提供する。
【解決手段】本システム100では有関節座標計測機(CMM)200及びレーザトラッカ400を使用し、そのCMM200上にはレーザトラッカ400と対をなすレトロリフレクタを配置する。共通の基準座標系による座標値にCMM200による計測値及びレーザトラッカ400による計測値を変換できるためCMM200を移動させることができる。更に、レーザトラッカ400では計測できない隠れ点を有関節CMM200等で計測することができる。
(もっと読む)
パターン画像表示装置およびパターン画像表示方法
【課題】コントラストの高いパターン画像の表示を低コストにて実現する。
【解決手段】パターン画像表示装置の画像取得部13は、光照射部131、ラインセンサ132、角度変更機構、および、表示対象であるガラス基板9を移動する移動機構を備える。光照射部131からは、ガラス基板9の薄膜パターンに対して透過性を有する波長の光が出射される。光照射部131からの光の照射角θ1およびラインセンサ132により撮像が行われる検出角θ2は、常に同じであり、これらの角度は角度変更機構により変更される。パターン画像表示装置では、予め画像のコントラストが高くなる照射角および検出角の設定角度が求められ、照射角および検出角が設定角度とされる。これにより、単一波長の光源を用いてコントラストの高い画像をラインセンサ132により取得し、ディスプレイに表示することができ、パターン画像表示装置の製造コストも削減することができる。
(もっと読む)
空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラム
【課題】空中写真画像データ同士の対応点を精度良く自動で設定することを可能にする空中写真画像データの対応点設定方法及び対応点設定装置並びに対応点設定プログラムを提供する。
【解決手段】第1空中写真画像データ及び第2空中写真画像データの共通特徴点の座標位置及び外部標定要素から三角測量の原理に基づいて共通特徴点の3次元空間における座標位置を算出し、このときの座標位置が第3空中写真画像データに投影される投影位置を算出し、投影位置を含む探索領域を第3空中写真画像データに設定し、探索領域に対して共通特徴点でパターンマッチングし、マッチング率が閾値以上で最も高いときの座標位置から投影位置までの誤差ベクトルを算出し、誤差ベクトルのうち最も多く頻出する最頻誤差ベクトルを検出し、誤差ベクトルが最頻誤差ベクトルとなる位置の投影位置に最頻誤差ベクトルを加えた位置を共通特徴点に対応する対応点に設定するようにした。
(もっと読む)
プロキシミティ露光装置、プロキシミティ露光装置のギャップ制御方法、及び表示用パネル基板の製造方法
【課題】基板の一面を複数のショットに分けて露光する際、ショット毎に、マスクと基板とがより平行な状態でギャップ合わせを行って、露光精度を向上させる。
【解決手段】マスクホルダ20とチャック10とを相対的にZ方向へ移動及びチルトする複数のZ−チルト機構30と、マスク2と基板1とのギャップを複数箇所で測定する複数のギャップセンサー30とを設ける。予め露光した基板のパターンを測定して、各ギャップセンサー40の測定点におけるショット毎のオフセット値を決める。ショット毎に、各ギャップセンサー40の測定値を、各測定点におけるショット毎のオフセット値で補正し、補正後の補正値に基づいて、複数のZ−チルト機構30によりマスク2と基板1とのギャップ合わせを行う。
(もっと読む)
撮像装置及びこれを備えた物体検出装置並びに偏光フィルタ
【課題】湾曲面からの反射光を適切にカットし又は湾曲面からの反射光を適切に選択して透過させることを課題とする。
【解決手段】湾曲したフロントガラス面に対する相対位置が一定となるように設置され、そのフロントガラス面からの反射光(水平偏光成分S)をカットする鉛直偏光領域を備えた偏光フィルタ層を介して、撮像領域からの光を画像センサ206上の各撮像画素で受光して撮像する撮像装置において、上記鉛直偏光領域は、透過軸方向が異なる複数のフィルタ領域部分から構成されており、各フィルタ領域部分の透過軸方向は、当該フィルタ領域部分へ入射してくるフロントガラス面上からの反射光の最大偏光成分の偏光方向に基づいて設定される。
(もっと読む)
ホースクリップ組付け状態検査方法
【課題】ホースクリップが周方向の所定位置に組付けられているかどうかを容易に管理することが可能なホースクリップ組付け状態検査方法を提供する。
【解決手段】ゴムホース及びこのゴムホースに組み付けられたホースクリップをカメラで撮像する工程と、これらのゴムホース及びホースクリップの画像を検査パターンに画像処理する工程と、この検査パターンを、予めホースクリップの合格パターンとして記憶されたホースクリップの所定周方向組付け位置のパターンと比較する工程と、ホースクリップの周方向組付け位置の合否を判定する工程と、を備える。
(もっと読む)
自走式管内検査カメラ装置および管径変換ユニット
【課題】2倍強の管径差をもつ広範な管径(350mm〜800mm)を対象に、検査対象となる配管内を円滑にかつ適正な速度で走行して、管内を斑なく的確に観察できる自走式管内検査カメラ装置を提供する。
【解決手段】走行ユニットを構成する管径変換ユニット1と管径変換ユニット1に選択的に結合される管径変換アダプタ用取付アダプタ13および第1乃至第3の管径変換アダプタ(CA1)〜(CA3)とにより複数種の管径に対応した自走式管内検査カメラ装置の管径変換ユニットを構成している。
(もっと読む)
かぶりコンクリートの剥落形状計測装置、及び、かぶりコンクリートの剥落形状計測方法
【課題】作業性に優れたかぶりコンクリートの剥落形状計測装置を実現し、実際のかぶりコンクリートの剥落部を現場で計測可能とする。
【解決手段】剥落形状計測装置2は、分解自在で可搬性のあるフレーム部4の天板部10にリニアガイド12を固定し、リニアガイド12の下面に、案内方向と計測方向とが直交するようにして2次元走査可能なレーザ変位センサ5をスライド移動自在に支持する。把持部4を持って測定対象の剥落部32を覆うようにして装置を固定する。その際、リニアガイド12の案内方向が剥落部32の鉄筋30の方向に平行となるようにする。そして、鉄筋30の長手方向に沿ってレーザ変位センサ5の計測位置を移動させては計測することを繰り返して、剥離部32の3次元の形状を計測する。
(もっと読む)
レール凹凸測定装置
【課題】レールの凹凸をレール長手方向に連続測定するレール凹凸測定装置を提供する。
【解決手段】測定レール(R1)上を走行可能な測定車両(10)と、測定車両(10)の進行距離を測定する距離センサ(31)と、測定車両(10)に取り付けられると共に測定レールの長手方向に不均等な間隔で順に直列に配置された第1、第2および第3の変位センサ(21、22、23)からなる変位センサ群(20)を有し、第1、第2および第3の変位センサ(21、22、23)のうち少なくとも1つの変位センサは位置について変更可能である。
(もっと読む)
改良された関節式アーム
【課題】高い正確度、高い信頼性および耐久性、相当な
使い易さ、ならびに低コストを有する間接式アームを提供する。
【解決手段】関節式アームCMM1は、複数の伝達部材20と、少なくとも2つの伝達部材20を互いに接続する複数の関節部材30〜36と、遠端における座標取得部材50と、近端におけるベース10とを備える。関節部材30〜36の少なくとも2つは、少なくとも1つのエンコーダを備えることが可能であり、少なくとも2つのエンコーダは、ともに、単一のモノブロックハウジング内に収容されることが可能である。
(もっと読む)
移動体位置検出装置
【課題】移動体の進行方向を、簡便な手法によって精度よく検出することができるようにする。
【解決手段】物体検出センサ1によって、移動体としての車両V周囲の物体が検出される。GPS3によって、誤差を含んだおおまかな車両Vの位置、方位が測位される。地図データ4と物体検出センサ1で検出された検出データとを、直交座標系を用いてマッチングさせて、車両Vの現在位置の測位が行われる。車両Vの位置を原点とする極座標系を用いて、地図データと検出データとをマッチングさせて、車両Vの進行方向が決定される。
(もっと読む)
形状測定装置
【課題】測定範囲および測定精度を調整・変更可能なプローブを備えた形状測定装置を提供する。
【解決手段】ワークに直線状の光を照射する光照射部と、光照射部から照射された光のワークからの反射光を撮像する撮像素子32と、ワークからの反射光を撮像素子32の撮像面に結像させる結像レンズ31と、を備え、光照射部の光照射面と、結像レンズ31の主点を含む主平面と、撮像素子32の撮像面とが、シャインプルーフの条件を満たした形状測定装置であって、撮像素子32の撮像面を複数の領域(S1〜S3)に分割し、測定精度及び/又は測定範囲の大きさに応じて、複数の領域から測定に利用する領域を画像取得領域として選択する制御部10を備える。
(もっと読む)
三次元計測治具及びこれを用いた三次元計測方法
【課題】計測対象物における孔の三次元座標を正確に計測することが可能である三次元計測治具及びこれを用いた三次元計測方法を提供する。
【解決手段】レーザ測定機LによってワークWにおける孔Whの三次元座標を得るのに用いられるリフレクタRを保持する三次元計測治具1であって、立形NCフライス盤10のスピンドル軸12に取り外し可能に装着される連結部2と、立形NCフライス盤10の動作によりワークWの孔WhにリフレクタRを相対的に接近させ、且つ、該ワークWにおける孔Whの縁にリフレクタRが接触した時点でリフレクタRを孔Whに押し付け可能なターゲット保持機構3を備えている。
(もっと読む)
1 - 20 / 205
[ Back to top ]