
Fターム[2F065MM16]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 投光系による走査 (1,119) | 光学的走査 (636)
Fターム[2F065MM16]に分類される特許
1 - 20 / 636
測距機能付内視鏡
表面検査装置及び表面検査方法
検査装置
測位システム、測位方法、及びプログラム
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法
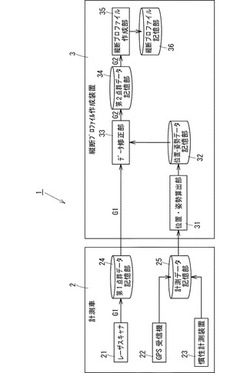
【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
トレンチ深さ測定装置及びトレンチ深さ測定方法並びに共焦点顕微鏡
【課題】トレンチ幅が照明光の波長と同程度の高アスペクト比のトレンチの深さを測定できるトレンチ深さ測定装置を実現する。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
(もっと読む)
形状測定装置
【課題】被測定物に対する面方向の分解能や測定位置の変更を容易に行うことができる形状測定装置を提供する。
【解決手段】光源10と、光源10からの光を2つの光束に分割して、一方の光束を被測定物Tに照射し、他方の光束を参照ミラー40に照射させると共に、これらから反射された光を合波させるスプリッタ20と、スプリッタ20によって合波された光により得られる画像を撮像するCCD50と、2つの傾き状態に制御される複数の微小ミラーを有するDMDと、複数の微小ミラーを制御して被測定物Tや参照ミラー40への照射光等を絞り込み、その状態で撮像された画像に基づき、測定点の高さを測定する制御手段と、を備えることを特徴とする。
(もっと読む)
車両ドア開閉の検知装置および検知方法
【課題】駅ホーム側だけで入線・停車した電車の車両ドアの開閉状態を検知することができ、外乱光や車両汚れの影響を受けず、高い検知精度で車両ドアの開閉状態に係る情報を取得でき、さらに、旅客の乗降状態および混雑状態を考慮して高い精度で車両ドアの開閉状態を検知できる車両ドア開閉の検知装置および検知方法を提供する。
【解決手段】この車両ドア開閉検知装置13は、駅ホーム11に停車した電車14の車両ドア15の開閉状態を検知する装置であり、乗降口41付近の車両床面42を含む範囲を測距対象範囲18と設定して駅ホーム側に設置された距離画像センサ21と、距離画像センサが取得した三次元距離画像44,45に基づいて車両ドアの開閉状態を判断する車両ドア開閉判断手段32とを備えている。
(もっと読む)
座標検出装置
【課題】 表示面における遮光物の座標位置を取得するまでの処理時間が短く、かつ表示面に接触した遮光物が検出光を遮光したことを適切に判断することができないことで発生する誤検出を防止することができる座標検出装置を提供する。
【解決手段】 座標検出装置10は、矩形状の表示面5を有する表示部5aと、複数の発光素子6aと、複数の受光素子6bと、座標位置検出部とを備える。表示面5は、第1側辺1aと、第2側辺2aと、第3側辺3aと、第4側辺4aとによって形成される。第1側辺1aと第2側辺2aとが接続された第1接続部1b、および第3側辺3aと第4側辺4aとが接続された第3接続部3bのそれぞれ近傍において発光素子6aが設けられている。
(もっと読む)
計測装置
【課題】簡易な構成で広い計測レンジと高い計測精度とを実現した計測装置を提供する。
【解決手段】計測装置は、第1光源、第2光源、第1検出器、第2検出器及び算出部を備える。第1光源は第1波長と第2波長との間で波長が走査された走査区間を含む第1光を生成する。第2光源は第3波長の第2光を生成する。第1検出器は第1光を参照面及び被検面に各々照射することで生成された第1干渉縞を検出する。第2検出器は第2光を参照面及び被検面に各々照射することで生成された第2干渉縞を検出する。第3波長は第1波長及び第2波長の合成波長より短い。算出部は第1時刻において第2干渉縞の位相のデータから第2干渉縞の次数が算出できなくなった場合に、第1時刻より後の走査区間における第1干渉縞の位相の変化に基づいて第1時刻以降における第2干渉縞の次数を算出し、該算出された第2干渉縞の次数を用いて第1時刻以降における被検面の形状を算出する。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
露光装置の調整方法、形状測定方法および形状測定装置
【課題】高精度に調整可能な露光装置の調整方法を提供することにある。
【解決手段】本発明の露光装置の調整方法は、鏡面部に光散乱部位を有する鏡面部材を有する露光装置の上記鏡面部に対し、レーザー光を照射する工程と、上記鏡面部の上記光散乱部位からの上記レーザー光の散乱光に基づき、上記光散乱部位までの距離を演算する工程と、上記演算工程に基づき上記鏡面部の形状を判定する工程と、上記判定結果に基づき、上記鏡面部の形状を調整する工程と、を有する。かかる方法によれば、鏡面部であっても光散乱により鏡面部の形状認識が可能となり、これに基づき、鏡面部の表面形状を調整することで、露光光の平行度の補正を効果的に行うことができる。
(もっと読む)
溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法
【課題】溶接ビード欠陥の検出精度を向上できる溶接ビード欠陥検出装置及び溶接ビード欠陥検出方法を提供する。
【解決手段】溶接ビードの欠陥を検出する溶接ビード欠陥検出装置10であって、溶接モデルBLと平滑モデルSLとの比較、あるいは、平滑モデルSLと折線モデルVLとの比較、に基づいて、溶接モデルBLを、異常点と正常点とに分別する点群データ分別手段200と、異常点と、隣接する正常点間の距離と、に基づいて、溶接モデルBLを、欠落領域GGと非欠落領域GNとに分別する欠落領域分別手段300と、欠落領域GGまたは非欠落領域GNを順次併合して併合欠落領域GGGとする欠落領域併合手段400と、を具備する。
(もっと読む)
三次元分光的符号化撮像のための方法と装置
【課題】簡単な構成で、深度に関して解像度の良い、広い、三次元撮像方法の実現。
【解決手段】位相感知分光的符号化撮像を使用する、三次元表面測定値を得るための方法および装置が記述される。横方向および深度の両者についての情報は、単一モード光ファイバを介して送信され、本手法を小型プローブへの組み込むことが可能となる。
(もっと読む)
ロボットシステム
【課題】スリット光の予測投影領域を最適化することによってロボットによるワークの取出作業の速度および精度を向上させることができるロボットシステムを提供すること。
【解決手段】実施形態の一態様に係るロボットシステムは、投影部と撮像部と予測投影領域決定部と投影位置検出部とロボットとを備える。投影部は、ワークが載置される載置領域へスリット光を投影して所定の移動方向へ移動させる。撮像部は、ワーク上を移動するスリット光を順次複数回撮像する。予測投影領域決定部は、撮像された画像を移動方向と交差する交差方向へ横断し、画像における交差方向の中央に近いほど移動方向と平行な方向の長さが長くなるように、画像におけるスリット光の予測投影領域を決定する。投影位置検出部は、予測投影領域の中からスリット光の投影位置を検出する。ロボットは、検出された投影位置に基づいてワークを把持する。
(もっと読む)
距離測定装置及び軌道周辺支障物検出装置
【課題】太陽光などの投光波長以外の光を極限まで制限して、投光波長のみを受光できるようにする。
【解決手段】干渉膜を使った平面板の干渉フィルタを用いて広い視野の検出手段を構成すると、平面板の干渉フィルタへの入射角に応じて透過帯域の移動が起こり、所望の信号強度を得ることが困難となる。この発明は、干渉フィルタの形状を球面状にして全視野の受光光線を干渉フィルタの入射面に対して垂直に入射するようにして、透過帯の移動をなくし、所望の信号強度を得るようにした。また、受光レンズの第一主点と球面状干渉フィルタの球面中心とを一致させて配置することにより、干渉フィルタへ入射する反射光の入射角を0°にして透過帯域が変化しないようにした。
(もっと読む)
光学式位置検出装置、位置検出システムおよび入力機能付き表示システム
【課題】検出光の進行方向および検出光の進行方向に交差する方向の双方における検出範囲を拡張することのできる光学式位置検出装置、位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】位置検出システム1において、光源部12は、検出光L2を放射状に出射するとともに、検出光L2の放射角度範囲において一方側から他方側に向かって強度が変化する光強度分布を形成し、受光部13は、光強度分布が形成された検出対象空間10Rに位置する対象物体Obで反射した検出光L2を受光する。光源はレーザー光源14であり、レーザー光源14から出射されたレーザー光(検出光L2)を可動ミラー11によって走査する。
(もっと読む)
検査装置、検査方法及び半導体装置の製造方法
【課題】検査対象からの反射光角度の変化に基づいて基板の欠陥を精度よく検査することができる検査装置を提供すること。
【解決手段】本発明に係る検査装置は、赤外光を出射する光源11と、光源11から出射される赤外光を平行光としてウエハ30に略垂直に入射させ、当該ウエハ30からの反射光を導く光学系と、光学系により導かれる反射光のうち、正反射光以外の光を検出するIRカメラ19、20とを備え、光源11からの赤外光を導光する光ファイバ13の出射端面面は、光学系の瞳位置に配置されている。
(もっと読む)
走査型検出測定装置、及び測定方法
【課題】簡素な構成を採用しつつ検出光量ムラの発生を抑制可能とした走査型検出測定装置を提供する。
【解決手段】本発明の走査型検出測定装置は、レーザ光を射出する発光素子と、発光素子から供給されるレーザ光を走査しつつ標本に照射する走査光学系と、標本から生じる光を検出する検出光学系と、発光素子と走査光学系との間に設けられレーザ光の一部を発光素子に向けて反射させる反射光学素子と、を有することを特徴とする。
(もっと読む)
1 - 20 / 636
[ Back to top ]