
Fターム[2F065MM28]の内容
光学的手段による測長装置 (194,290) | 走査形態 (5,021) | 受光系による走査 (768) | 投光系との同期 (240)
Fターム[2F065MM28]に分類される特許
1 - 20 / 240
コイルばね計測装置
検査装置
測距機能付内視鏡
三次元レーザ計測システムおよび路面の縦断プロファイルの作成方法
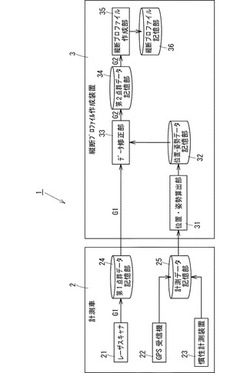
【課題】複雑で時間のかかるキャリブレーションを必要とせずに、高精度の路面の縦断プロファイルを作成できる移動式の三次元レーザ計測システムを提供する。
【解決手段】本発明の計測システムでは、以下の3段階のステップで路面の縦断プロファイルを作成する。最初に、計測車2に搭載されたレーザスキャナ21を用いて、走行しながら道路の路面の平面位置と高さを計測して第1の三次元点群データG1を取得する。次に、第1の三次元点群データG1を、計測車2に搭載されたGPS受信機22および慣性計測装置23を用いて取得したデータに基づいて修正して、地理座標系で表示された第2の三次元点群データG2を作成する。最後に、第2の三次元点群データG2から計測車2のいずれかのタイヤの軌跡に対応する第3の三次元点群データG3を切り出し、この第3の三次元点群データG3に基づいて、路面の縦断プロファイルを作成する。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
トレンチ深さ測定装置及びトレンチ深さ測定方法並びに共焦点顕微鏡
【課題】トレンチ幅が照明光の波長と同程度の高アスペクト比のトレンチの深さを測定できるトレンチ深さ測定装置を実現する。
【解決手段】照明光学系は、ライン状の照明ビームを発生する光源装置1〜4及びライン状の照明ビームを前記試料に向けて投射する対物レンズ6を有し、光源装置と対物レンズとの間の瞳位置にトレンチの長手方向と平行なライン状の瞳パターンを形成する。ライン状の瞳パターンは対物レンズを介してトレンチが形成されている試料表面7にトレンチと交差するようにライン状の照明エリアを形成する。また、照明光として直線偏光した照明光を用い、その電界ベクトルの方向は、トレンチの長手方向に対してほぼ平行に設定する。直線偏光した照明光の電界ベクトルの方向をトレンチの長手方向に設定することにより、トレンチにおける光損失が減少し、トレンチの内部に照明光を進入させることでき、高精度な深さ測定が可能になる。
(もっと読む)
形状測定装置
【課題】被測定物に対する面方向の分解能や測定位置の変更を容易に行うことができる形状測定装置を提供する。
【解決手段】光源10と、光源10からの光を2つの光束に分割して、一方の光束を被測定物Tに照射し、他方の光束を参照ミラー40に照射させると共に、これらから反射された光を合波させるスプリッタ20と、スプリッタ20によって合波された光により得られる画像を撮像するCCD50と、2つの傾き状態に制御される複数の微小ミラーを有するDMDと、複数の微小ミラーを制御して被測定物Tや参照ミラー40への照射光等を絞り込み、その状態で撮像された画像に基づき、測定点の高さを測定する制御手段と、を備えることを特徴とする。
(もっと読む)
車両ドア開閉の検知装置および検知方法
【課題】駅ホーム側だけで入線・停車した電車の車両ドアの開閉状態を検知することができ、外乱光や車両汚れの影響を受けず、高い検知精度で車両ドアの開閉状態に係る情報を取得でき、さらに、旅客の乗降状態および混雑状態を考慮して高い精度で車両ドアの開閉状態を検知できる車両ドア開閉の検知装置および検知方法を提供する。
【解決手段】この車両ドア開閉検知装置13は、駅ホーム11に停車した電車14の車両ドア15の開閉状態を検知する装置であり、乗降口41付近の車両床面42を含む範囲を測距対象範囲18と設定して駅ホーム側に設置された距離画像センサ21と、距離画像センサが取得した三次元距離画像44,45に基づいて車両ドアの開閉状態を判断する車両ドア開閉判断手段32とを備えている。
(もっと読む)
3次元形状データ処理方法、3次元形状データ処理装置
【課題】3次元形状に対応するデータファイルのサイズを小さく、転送や取り扱いを容易とする。
【解決手段】レーザ光200の走査によって構成される面(走査面)と3次元形状をもつ対象物300との交線上に、各測定点は離散的に存在する。この3次元形状データ処理方法においては、データとして、3次元空間座標の点群データの代わりに、各走査面上における各測定点の平均位置Gnの空間的位置、走査面における座標軸Un、Vn軸の方向、各測定点Pn,i(1≦i≦k)についての、走査面での2次元座標(un,i、vn,i)を記録する。ただし、この2次元座標を記録する代わりに、後述する符号化された値を記録することもできる。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
光学式位置検出装置および入力機能付き表示システム
【課題】検出空間を拡張した場合でも、装置を大型化せずに対象物体の位置を精度よく検出することができる光学式位置検出装置、および入力機能付き表示システムを提供すること。
【解決手段】光学式位置検出装置10では、光源部12から検出光を出射した際、受光部13は対象物体Obからの反射光を第1受光素子131および第2受光素子132で受光する。第1受光素子131および第2受光素子132は、第1受光素子131の受光面131aに対する法線方向と第2受光素子132の受光面132aに対する法線方向との交差角度θcが90°を超え、180°未満となる値、好ましくは、120°を超え、140°未満となる値に設定されている。
(もっと読む)
形状測定装置
【課題】従来の形状測定装置は、被測定物体の幅方向に変位計を複数台設置して凹凸を測定していたので、幅方向の分解能が粗いという問題があった。また、スポット光と光走査装置を用いて、被測定物体の幅方向にこの光スポットを走査し、撮像装置で走査されたスポット光を撮像する方法が提案されていたが、撮像装置の受光信号のレベルが低い、または、測定範囲内の受光レベル差が大きく、安定した測定ができないという問題があった。
【解決手段】被測定物体に垂直でかつ幅方向にスリット状の光を照射するスリット光光源と、スリット光源と反対側に配置される撮像装置と、被測定物体に垂直でかつ搬送方向にスリット状の光を照射するスリット光光源と、スリット光源と反対側に配置される撮像装置と、撮像素子上の結像座標を被測定物体の測定座標に変換する座標変換器と、顕在形状演算器を備えた。
(もっと読む)
3次元計測装置
【課題】反射率の低い被計測物であっても輪郭を正確に計測することができる3次元計測装置を提供する。
【解決手段】
所定の波長領域を有する光を照射し被測定物で反射した反射光と基準反射光との干渉光の各波長の光強度を検出して分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行する制御手段を具備する3次元計測装置であって、被計測面が対物レンズの集光点位置と一致するように予め波形解析後の光強度のピーク位置と共焦点位置の対応をとっておき、制御手段はイメージセンサーからの検出信号に基づいて分光干渉波形を求め、分光干渉波形と理論上の波形関数に基づいて波形解析を実行し、対物レンズの集光点位置に対応する光強度を位置付け手段によって特定されたX、Y座標におけるZ座標の光強度としてメモリに保存し、該メモリに保存されたX、Y、Z座標に基づいて3次元画像を形成する。
(もっと読む)
画像形成装置および画像形成方法ならびに部品実装装置
【課題】安定した3次元認識画像を形成して正しい部品認識結果を得ることができる画像形成装置および画像形成方法ならびに部品実装装置を提供する。
【解決手段】計測対象面への入射方向を挟んで対称に配置され受光面の計測対象面に対する傾斜角度が各対毎に相異なる2対の位置検出素子群25A,25Bを有し、走査光の計測対象面からの反射光の受光位置を検出する位置検出部25と、各位置検出素子が受光する光量が所定の範囲内にあるか否かを判定する受光量判定部34と、同一の位置検出素子群に属する位置検出素子による反射光の受光位置検出結果の差異の大きさが所定の基準値以下であるか否かを判定する受光位置検出結果判定部35とを備え、位置検出部25の受光位置検出結果に基づき受光量判定部34および受光位置検出結果判定部35の判定結果を加味して計測対象面の3次元認識画像を形成する構成とする。
(もっと読む)
画像合成のための3次元プロファイルマップの作成方法
【課題】光学顕微鏡を用いて、一つの立体的な試料に対して、焦点距離の異なる多数の画像を得、これらの画像を組み合わせて、全領域の焦点が合った1枚の2次元合成画像を得るため、試料の高さ情報を表示する3次元プロファイルマップの作成方法を提供する。
【解決手段】試料を異なる高さから撮像して、焦点部位の異なる2次元試料画像を得、離散ウェーブレット変換を行うことにより得られた詳細サブーバンドにおいて、最大の詳細サブーバンド係数値を示す画像の撮像高さで、初期の高さ地図を作成し、それぞれの入力画像において、焦点整合度を計算し、フィルターをかけて、非合焦点のピクセル(非境界点)の高さ情報は除去し、除去されたピクセル(非境界点)の高さを、フィルターを通過したピクセル(境界点)の高さ値から内挿して算出し、前記高さ情報の除去されたピクセルに対して前記内挿によって算出された高さを代入して高さ地図を作成する。
(もっと読む)
変位センサ
【課題】分解能を維持しつつ広い計測レンジで変位を測定することが可能な変位センサを提供する。
【解決手段】センサヘッド100は、レーザダイオード1と、フォトダイオード2と、偏光ビームスプリッタ(PBS)3と、レンズ4〜6と、ピンホール7aが形成された絞り板7と、アーム8a,8bを有する音叉状の振動子8と、振動子8のアーム8aに取り付けられたレンズ9(コリメートレンズ)と、振動子8のアーム8bに取り付けられたレンズ10(対物レンズ)とを備える。レンズ9の焦点距離は、レンズ10の焦点距離の2倍以下、好ましくは1倍と定められる。
(もっと読む)
光学式位置検出装置、電子機器及び表示装置
【課題】対象物の位置に応じて効率良く位置検出ができる光学式位置検出装置、電子機器及び表示装置等を提供する。
【解決手段】光学式位置検出装置は、X−Y平面に沿って設定される検出エリアRDETに照射光LTを射出する光射出部3と、検出エリアRDETにおいて照射光LTが対象物OBに反射したことによる反射光LRを受光する受光部4と、受光部4の受光結果に基づいて、対象物OBの位置情報を検出する検出部50とを含む。光射出部3は、X−Y平面に直交するZ軸での対象物OBのZ座標位置に応じて、受光部4が検出する位置情報の検出精度を異ならせるように照射光LTを射出する。
(もっと読む)
光学装置、スキャン方法、リソグラフィ装置及びデバイス製造方法
【課題】センサのコスト及び嵩増大、及び/又は測定の精度不良を回避又は低減する光学スキャン機構を提供する。
【解決手段】装置は、リソグラフィ基板W上のマーク202の位置を測定する。測定光学システムは、マークを放射スポットで照明する照明サブシステムと、マークによって回折した放射を検出する検出サブシステム580とを備える。傾斜ミラー562は、放射スポットを、マーク自体のスキャン運動と同期して測定光学システムの基準フレームに対して移動させて、正確な位置測定値を取得するより多くの時間を提供する。ミラー傾斜軸568は、ミラー平面と対物レンズ524の瞳面Pとの交点に沿って配置され、スキャンのアーティファクトを最小限にする。他のタイプの装置、例えば共焦顕微鏡におけるスキャンのために同じ幾何学的構成を使用できる。
(もっと読む)
光学走査プローブ
【課題】対象物を光ストライプで照射し、対象物表面から反射した光を検出することで、対象物の表面上の複数の点からデータを捕捉するための走査プローブを提供する。
【解決手段】走査プローブは、(a)光ストライプを生成および発するためのストライプ生成手段14、(b)対象物表面から反射した光ストライプを検出するための画素の配列を有する画像センサを備えるカメラ16、(c)カメラ16によって検出された強度に応じて、フレームの取得中に光ストライプの強度を調節するための手段を備える。ストライプ長を修正する手段、処理手段のための隔離された区分室、およびスキャナのための取り付け可能なダストカバーを有するスキャナにも関する。
(もっと読む)
情報処理装置、情報処理方法
【課題】 パターン画像を高速に投影して撮像する為の技術を提供すること。
【解決手段】 ストライプ状の模様が記されたパターン画像を定期的に送信するPC201から、該パターン画像を受信する。パターン画像の送信周期内に、パターン画像におけるそれぞれ異なる水平ラインごとに、該水平ライン上の画素群を繰り返し用いて形成される投影画像を投影部207に入力する。投影部207が投影画像を投影する毎に、該投影のタイミングでカメラ103に撮像させる。
(もっと読む)
1 - 20 / 240
[ Back to top ]