
Fターム[2F065NN02]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 光強度の (880) | 光源出力 (595)
Fターム[2F065NN02]に分類される特許
1 - 20 / 595
情報処理装置、情報処理装置の制御方法、およびプログラム
光ファイバセンサ
【課題】光干渉信号出力をセンサ信号とするセンサには、構成が簡単で、センサ部分の無電源化が可能なホモダイン干渉方式があるが、安定な動作を得るには、使用部品に対し厳しい工作精度と熱膨張対策が必要であると共に、センサ信号として変動できる位相範囲は±90度以内に限られていた。
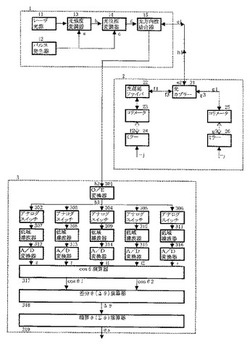
【解決手段】干渉計の入力を周期性光パルスとし、参照光パルスの前半と後半で位相を90度(直交位相)異なる位相とし、計測光パルスと干渉させることにより、90度異なる2つの干渉出力値i1、i2を得て、その参照光と計測光の値r、sとから、参照光と計測光の位相差をθとして、2つの余弦値cosθ1、cosθ2を算出して余弦曲線上に位置を定め、その角度θ1、θ2を求めることによって、干渉光の強度変動、位相動作点変動の影響を除外するとともに、1周期前との角度の差分を積算して、センサ出力とすることにより、センサ信号として変動できる位相範囲が、±90度(半波長)を超えることを許容する光ファイバセンサを提供する。
(もっと読む)
物品配列検査方法および物品配列検査装置

【課題】整列状態にあることが要求される物品の列について、整列状態を乱す物品の位置ずれ、欠落、倒れなどの種々の整列不良を検出することを可能とする。
【解決手段】物品の列が整列状態にあるかどうかを検査する方法であって、準備工程では、整列状態にある物品a1〜a4の列Paに対しその物品の列を列方向の全幅にわたって切断するような帯状の光Rを照射して各物品a1〜a4の表面に各物品の輪郭に沿う光切断線Lを生成するとともに、その光切断線Lを撮像して基準となる画像を取得する。検査工程では、検査対象の物品b1〜b4の列Pbに対し同じ帯状の光Rを照射するとともに、前記準備工程で撮像した光切断線の生成位置に対応する位置に生成された光切断線Lを撮像して検査対象画像を取得した後、その検査対象画像を前記基準となる画像と照合して、検査対象の物品b1〜b4の列Pbが整列状態にあるかどうかを判別する。
(もっと読む)
光学式変位センサ
【課題】ノイズ光が入射した場合に誤った計測が行われるのを防止して、計測の精度を確保する。
【解決手段】検出用の光を投光する投光部101と、投光された光に対する反射光を受光する受光部102と、変位を計測する計測処理部として機能するCPU10とを具備するセンサ1のCPU10に、受光量の変化を表すパラメータまたは受光量の増減に応じて調整される感度を示すパラメータの値があらかじめ定めた許容範囲に入るか否かを判別する判別手段の機能を付与する。CPU10は、判別対象のパラメータの値が許容範囲に入っていると判別した場合には、計測処理を行って結果を出力するが、判別対象のパラメータの値が許容範囲を逸脱すると判別した場合には、計測結果が出力されないように制御する。
(もっと読む)
画像処理装置、画像処理方法及びコンピュータプログラム
【課題】背景が含まれる場合であっても、背景の明るさの影響を低減して検査対象物表面の明るさを自動的に調整することができる画像処理装置、該画像処理装置で実行する画像処理方法及びコンピュータプログラムを提供する。
【解決手段】検査対象物を含む撮像領域を撮像する撮像部と、撮像領域を前記撮像部で撮像した画像に対して画像処理を実行する画像処理部とを備える。画像処理部は、撮像部から出力された画像の撮像領域内に設けられ、各々が複数の画素を含む複数の小領域ごとに、検査対象物が存在する可能性を示す特徴量を算出する。算出した特徴量に基づいて、少なくとも検査対象物を含む画像の明るさの評価値を算出し、算出した評価値に基づいて、画像の明るさを調整するための調整信号を出力する。
(もっと読む)
撮像装置、撮像方法、及びプログラム
【課題】被写体までの距離とともに、被写体の肌領域を精度良く算出する。
【解決手段】第1のLEDは、被写体に対して、第1の波長の光を照射し、第2のLEDは、被写体に対して、第1の波長とは異なる第2の波長の光を照射し、距離画像センサは、被写体からの反射光を受光する。そして、肌検出部は、被写体からの反射光として第1の波長の光が受光されることにより得られる第1の画像と、被写体からの反射光として第2の波長の光が受光されることにより得られる第2の画像に基づいて、被写体の肌を表す肌領域を検出し、距離画像センサは、第1の波長の光が被写体に照射されたときから、被写体からの反射光として受光されるまでの第1の往復時間を算出し、算出した第1の往復時間に基づいて、被写体までの距離を算出する。本開示は、例えば、被写体の撮像により、距離画像を生成する撮像装置等に適用できる。
(もっと読む)
厚み測定方法、厚み測定装置、および厚み測定システム
【課題】立体構造を有する物体の厚み分布を、短時間に、かつ容易に測定する。
【解決手段】厚み測定方法は、測定対象物6に光を照射する光照射工程(S1)と、測定対象物6に照射された光が、測定対象物6を透過しているときに、測定対象物6への光の照射方向とは異なる所定の方向から、測定対象物6を撮像する撮像工程(S2)と、その撮像画像に基づいて、測定対象物6の厚み分布を測定する測定工程(S3)と、を含む。
(もっと読む)
同軸落射照明の光量設定方法およびラベルの位置ズレ検査方法
【課題】製品に貼着されたラベルの位置ズレ等を光学的に検出する際に、ラベルの印字パターンや製品の色、材質が異なる生産ロットで検査を行う場合にも、容易に照明レベルを適切に設定できる光量設定方法を提供する。
【解決手段】同軸落射照明22により、カメラ21のレンズと同軸上から光を照射し、カメラ21により、テープカートリッジ11上に貼着されたラベル12の貼着状態を検出する。光量設定部25は、同軸落射照明22の光量レベルを低光量レベルから高光量レベルに徐々に上昇させ、ラベル12の外縁と浅溝の縁端により生じる2つのエッジを検出し、全ての部分で2つのエッジが判定できなくなったら、このときの光量に、1以下の実験係数を乗算することで、同軸落射照明22の最適な光量を設定する。
(もっと読む)
三次元表面検査装置および三次元表面検査方法
【課題】鏡面反射が酷い計測対象物であっても、簡単な構造により低コストで高精度かつ高速に表面の凹みや大きな疵などの三次元的欠陥を検査することが可能な三次元表面検査装置の提供。
【解決手段】計測対象物Xを撮影するカメラ装置3と、曲面状に配設されて計測対象物を覆うフィルタ膜と、フィルタ膜の曲面状に沿って周期的な強度分布を持つ曲面状強度分布のパターン光を投影し、フィルタ膜を介して計測対象物に投影する曲面パターン光投影手段5と、カメラ装置3により撮影された画像に対し、曲面状強度分布を直線状強度分布に変換するデコード処理を行うことで、計測対象物の表面の三次元的欠陥を検出する欠陥検出手段13とを含む。
(もっと読む)
画像測定装置
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
座標検出装置
【課題】 表示面における遮光物の座標位置を取得するまでの処理時間が短く、かつ表示面に接触した遮光物が検出光を遮光したことを適切に判断することができないことで発生する誤検出を防止することができる座標検出装置を提供する。
【解決手段】 座標検出装置10は、矩形状の表示面5を有する表示部5aと、複数の発光素子6aと、複数の受光素子6bと、座標位置検出部とを備える。表示面5は、第1側辺1aと、第2側辺2aと、第3側辺3aと、第4側辺4aとによって形成される。第1側辺1aと第2側辺2aとが接続された第1接続部1b、および第3側辺3aと第4側辺4aとが接続された第3接続部3bのそれぞれ近傍において発光素子6aが設けられている。
(もっと読む)
形状計測装置、及び形状計測装置の調整方法
【課題】正確に調整可能な形状計測装置を提供する。
【解決手段】第1の光を発する第1の発光部11、及び第2の光を発する第2の発光部12と、第1の光及び第2の光を受ける格子3と、平坦な基板が配置されるステージ14と、格子3を透過した第1の光を第1の入射角で基板表面に入射させ、格子3を透過した第2の光を第2の入射角で基板表面に入射させる投影光学系5と、第1の光による基板表面の格子3の第1の変形像、及び第2の光による基板表面の格子3の第2の変形像に基づき、基板表面の高さ方向の位置を算出する高さ算出部と、基板表面の高さ方向の位置が投影光学系5の焦点位置と一致するよう、ステージ14を移動させる移動装置15と、を備える、形状計測装置。
(もっと読む)
対象物の三次元座標を決定する方法および装置
【課題】対象物の三次元座標決定のための、改善された方法および装置を提供する。
【解決手段】対象物の三次元座標を決めるための方法において、プロジェクタ(3)によりパターン(6)が前記対象物(1)上に投影され、前記対象物(1)により反射された光がカメラ(4)により記録され、前記カメラ(4)によって記録された画像が測定される。前記対象物(1)の上および/または傍側にある基準点マーク(8)が、リファレンスカメラ(5)によって記録される。前記リファレンスカメラ(5)の視野(9)は、カメラ(4)の視野よりも広い。この方法を改善するために、前記リファレンスカメラ(5)は、前記カメラ(4)と、または前記プロジェクタ(3)および前記カメラ(4)を備える三次元センサ(2)と接続されている。
(もっと読む)
キャリブレーション方法および映像表示装置
【課題】テレビジョン装置に固定されたカメラのキャリブレーションを行い易いキャリブレーション方法および映像表示装置を提供することである。
【解決手段】実施形態のキャリブレーション方法は、カメラおよび第1ディスプレイを備える映像表示装置のカメラ映像を補正するキャリブレーション方法であって、設置工程と、第1表示工程と、反射工程と、撮像工程と、算出工程と、補正工程とを含む。設置工程では、前記第1ディスプレイと、第2ディスプレイとを対向させて設置する。第1表示工程では、前記第1ディスプレイに所定の表示画像を表示させる。反射工程では、前記第1ディスプレイ上の表示画像を前記第2ディスプレイの表面で反射させる。撮像工程では、前記第2ディスプレイで反射された前記表示画像を前記カメラによって撮像する。算出工程では、カメラ映像における前記表示画像の位置のずれから、前記カメラと前記第1ディスプレイとの相対的位置関係を算出する。補正工程では、前記相対的位置関係に基づいて前記カメラ映像を補正する。
(もっと読む)
画像読取システム、原稿サイズ検出装置、及び原稿サイズ検出方法、並びに画像読取方法
【課題】原稿の厚みに影響されず安定して原稿の画像を読み取ることができる画像読取システム、原稿サイズ検出装置、及び原稿サイズ検出方法、並びに画像読取方法を提供する。
【解決手段】原稿の画像を読み取る画像読取装置と、画像読取装置を制御する制御装置とを備えた画像読取システムであって、原稿を搬送路に沿って搬送する搬送手段と、搬送路の途中に設けられ且つ原稿の厚みに応じて搬送路から離れる方向に移動可能に設けられ、搬送路に沿って搬送される原稿の画像を読み取る画像読取手段と、画像読取手段で読み取った原稿の画像データに所定の処理を施す画像処理手段と、原稿の厚みを判別する原稿の厚さ判別手段と、原稿の厚さ判別手段による判別結果に基づいて、画像読取手段による原稿の読取条件、又は画像処理手段による原稿の画像処理条件を変更する変更手段とを備え、原稿の厚みに影響されず安定して原稿の画像を読み取るようにした。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
物品認識装置における照明の設定値設定方法および物品認識装置
【解決手段】ボンディング装置を構成する物品認識装置は、基板のバンプに照明光を照射する第1照明と、該第1照明とは異なる角度から上記バンプに照明光を照射する第2照明と、上記バンプで反射した上記照明光の反射光を撮影する第1撮影手段とを備えている。上記第2照明の輝度を固定したまま、第1照明の輝度を変化させて(S3)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における第1照明の輝度を記憶する(S7)。続いて第1照明の輝度を上記記憶した輝度で固定したまま、第2照明の輝度を変化させて(S9)、上記第1撮影手段が撮影した画像のうち、バンプが最も多く認識された画像を撮影した際における上記一方の照明の輝度を記憶する(S13)。
【効果】照明の設定値の設定を容易にかつ安定して行うことができる。
(もっと読む)
機器制御装置
【課題】複数人で構成されるグループが移動する経路上に設けられた1個以上の機器を到着に先立って制御することができる機器制御装置を提供する。
【解決手段】注視方向検出部2は、グループ内の各人が注視している方向を検出する。方向関係特定部3は、各人が注視している向きと照明機器が存在する方向との関係を特定する。グループ希望方向推定部4は、グループ内の全員について特定した関係に基づいて、グループ全体として照明機器が存在する方向への移動の希望を推定する。制御部5は、グループ希望方向推定部4による推定結果に基づいて、照明機器10_1〜10_Nを制御する。
(もっと読む)
面法線計測装置、面法線計測システム及び面法線計測プログラム
【課題】物体表面の反射特性に鏡面反射成分を含むことを必要とせず、物体表面までの距離の計測も必要とせずに面法線を計測する。
【解決手段】面法線計測システム1は、ガイドレールRx,Ryに沿って、互いに直行する平面内を移動して物体OBJに対する照明方向を変化させる照明装置30と、物体OBJを撮影する撮影装置40と、撮影装置40によって撮影された画像に基づいて物体OBJの表面の面法線を計測する面法線計測装置10とを備える。面法線計測装置10は、物体OBJの画像を2値化し、画素ごとに、照明方向と明暗とが対応付けられた陰影ベクトルを作成し、予め形状が既知の参照物体について作成した参照陰影ベクトルと面法線とが対応付けられたデータベースを参照して、物体OBJの陰影ベクトルと最も類似する参照陰影ベクトルに対応付けられた面法線を、その画素における面法線と推定する。
(もっと読む)
光学式位置検出装置、位置検出システムおよび入力機能付き表示システム
【課題】検出光の進行方向および検出光の進行方向に交差する方向の双方における検出範囲を拡張することのできる光学式位置検出装置、位置検出システム、および入力機能付き表示システムを提供すること。
【解決手段】位置検出システム1において、光源部12は、検出光L2を放射状に出射するとともに、検出光L2の放射角度範囲において一方側から他方側に向かって強度が変化する光強度分布を形成し、受光部13は、光強度分布が形成された検出対象空間10Rに位置する対象物体Obで反射した検出光L2を受光する。光源はレーザー光源14であり、レーザー光源14から出射されたレーザー光(検出光L2)を可動ミラー11によって走査する。
(もっと読む)
1 - 20 / 595
[ Back to top ]