
Fターム[2F065NN11]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 受光部の (262)
Fターム[2F065NN11]の下位に属するFターム
Fターム[2F065NN11]に分類される特許
1 - 20 / 140
検査装置
【課題】暗視野方式の検査装置などにおいて、信号を実測しながら検査条件を決める方法では時間がかかることと、設定した感度条件が適切か否かの判断が作業者の裁量に左右されることが課題である。
【解決手段】検査装置において、試料を保持するステージと、前記ステージ上に保持された試料の表面に照明光を照射する照明光学系と、前記試料に照射された照射光によって発生した散乱光を検出する暗視野光学系と、前記暗視野光学系にて検出された散乱光を電気信号に変換する光電変換部と、前記光電変換部によって変換された電気信号をデジタル信号に変化するAD変換部と、前記試料表面上の異物からの散乱光の大きさから異物の大きさを判定する判定部と、前記試料面からの散乱光情報を用いて、検査条件を決定する信号処理部とを有する。
(もっと読む)
ワーク位置検出システム

【課題】透明体であるワークの安定的な位置を検出することができるワーク位置検出システムを提供する。
【解決手段】透明体であるワークの端面が発光するように光を照射する少なくとも一つの投光部(21a〜21c)と、光によってワークの端面に生じた発光箇所を撮像する撮像部(22a、22b)と、撮像部による撮像結果に基づいてワークの位置を検出する検出部と、を有する。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
表示装置、電子機器、およびプログラム
【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
ボトル缶のねじ部検査装置
【課題】ボトル缶のねじ部を正確かつ短時間で検査する。
【解決手段】ライナー付キャップを被嵌するために開口端を外方へ向かってカールさせたカール部1とカール部1の下方でキャップをねじ嵌合するねじ部2とからなる口金部3を有するボトル缶4を缶軸Xまわりに回転させながら、口金部3の一部を含むように設定された撮像エリアを撮像して口金部3におけるねじ部2の形状を検査する装置であって、ボトル缶4を保持して缶軸まわりに回転させる回転手段21と、撮像エリア内のボトル缶4のねじ部2に半径方向外方かつ缶軸方向下方から斜め上向きに照明光Aを照射するねじ部照明手段22と、撮像エリアにおける照明光Aの反射光A´を含む検査画像を連続的に取得する撮像手段24と、反射光A´の撮像結果に基づきねじ部2のねじ始まり部を検出し、ねじ始まり部を含むねじ部2の検査を行うねじ部検査手段25とを備える。
(もっと読む)
形状測定装置
【課題】従来の形状測定装置は、被測定物体の幅方向に変位計を複数台設置して凹凸を測定していたので、幅方向の分解能が粗いという問題があった。また、スポット光と光走査装置を用いて、被測定物体の幅方向にこの光スポットを走査し、撮像装置で走査されたスポット光を撮像する方法が提案されていたが、撮像装置の受光信号のレベルが低い、または、測定範囲内の受光レベル差が大きく、安定した測定ができないという問題があった。
【解決手段】被測定物体に垂直でかつ幅方向にスリット状の光を照射するスリット光光源と、スリット光源と反対側に配置される撮像装置と、被測定物体に垂直でかつ搬送方向にスリット状の光を照射するスリット光光源と、スリット光源と反対側に配置される撮像装置と、撮像素子上の結像座標を被測定物体の測定座標に変換する座標変換器と、顕在形状演算器を備えた。
(もっと読む)
寸法測定装置
【課題】凹凸パターンの上部及び下部の寸法を明確に区別して測定する。
【解決手段】基板5上に形成された凹凸パターンを拡大観察する顕微鏡1と、前記顕微鏡1を通して観察される前記凹凸パターンを撮像する撮像カメラ2と、前記顕微鏡1の対物レンズ7の視野外からその視野内に散乱光を照射する照明光学系3と、前記撮像カメラ2の画像を入力して表示部17の画面17a上に表示し、入力手段16により入力して前記表示画面17a上に指定された範囲内の前記凹凸パターンの上部及び下部のいずれか一方、又は両方の寸法を測定する制御手段4と、を備えたものである。
(もっと読む)
投影装置およびその方法、並びに投影装置を用いた形状認識装置およびその方法
【課題】配置の制約が少なく、かつ照度不足および照度ムラが生じにくい投影装置を提供する。
【解決手段】撮像部の撮像対象物に対して光を投影する投影装置200であって、放射する光の波長帯が互いに異なる赤色LED240R、緑色LED240Gおよび青色LED240Bと、撮像対象物の特性に基づき、各LEDが放射する光の光量を制御する投影制御部230と、複数のLEDから放射される光を、同一の光軸上に導くことにより、撮像対象物に対して光を投影するリレー部250とを備える。
(もっと読む)
膜厚の検査装置および検査方法
【課題】 曲面を有する膜厚を正確に計測する。
【解決手段】 膜厚の検査装置は、テラヘルツ波を発生させるテラヘルツ波発生器15と、前記テラヘルツ波を、膜が形成された試料に照射させる照射光学系16、17と、前記試料において反射したテラヘルツ波を検出し、検出信号を出力するテラヘルツ波検出器22と、前記試料の反射面の形状情報に基づき、当該反射面から前記テラヘルツ波検出器に至るまでの反射波の電場強度を参照信号として算出し、前記参照信号を用いて前記検出信号を補正する制御装置5を備える。
(もっと読む)
3次元計測装置
【課題】被計測物を搬送するとともに、被計測物の3次元形状の全周を搬送の途中で停止させることなく非接触で計測することのできる3次元計測装置を提供する。
【解決手段】搬送経路の途中に被計測物Wの搬送方向Aに対して直交する左右方向に沿って計測隙間13が設けられた搬送装置3と、計測隙間13を通過する被計測物Wのステレオ画像を少なくとも計測隙間13の上方および下方のそれぞれで予め設定された計測周期毎に光学的に読み取ってステレオ画像を撮像し、そのステレオ画像の画像データを撮像し、それぞれのステレオ画像を画像データに変換してデータ処理装置5に出力するステレオカメラ21を有する撮像装置4と、ステレオカメラ21により計測周期の1周期毎に撮像されたそれぞれの画像データを合成する処理を連続して行うデータ処理装置5とを設ける。
(もっと読む)
形状測定装置
【課題】測定範囲および測定精度を調整・変更可能なプローブを備えた形状測定装置を提供する。
【解決手段】ワークに直線状の光を照射する光照射部と、光照射部から照射された光のワークからの反射光を撮像する撮像素子32と、ワークからの反射光を撮像素子32の撮像面に結像させる結像レンズ31と、を備え、光照射部の光照射面と、結像レンズ31の主点を含む主平面と、撮像素子32の撮像面とが、シャインプルーフの条件を満たした形状測定装置であって、撮像素子32の撮像面を複数の領域(S1〜S3)に分割し、測定精度及び/又は測定範囲の大きさに応じて、複数の領域から測定に利用する領域を画像取得領域として選択する制御部10を備える。
(もっと読む)
3次元形状測定装置
【課題】チャープ光の長さに依存することなく、奥行きの計測範囲を長くすることができる3次元形状測定装置を提供する。
【解決手段】3次元形状測定装置10は、波長が規則的に経時変化するチャープ光を生成して被測定物Wに対して照射するチャープ機器16と、被測定物Wを反射した反射チャープ光を所定タイミングで所定期間切り出す複数のシャッタ部22a、22b、22cと、複数のシャッタ部22a、22b、22cにより切り出された反射チャープ光と前記複数のシャッタ部22a、22b、22cの位置情報とを用いて、被測定物Wの複数領域の3次元情報を取得する3次元情報取得部26とを備え、複数のシャッタ部22a、22b、22cは、被測定物Wの基準位置に対して距離が異なるように設けられている。
(もっと読む)
形状測定装置およびこれに用いる光学フィルタ
【課題】装置構造を大型化することなく、光切断法によって至近距離から大型な被測定物の形状を精度よく測定できること。
【解決手段】本発明の一態様である形状測定装置1は、被測定物15にスリット光L1を照射し、フィルタ3およびレンズ4を介して被測定物15からのスリット光L1を撮像して、被測定物15の形状を測定する。フィルタ3は、レンズ4の物体側主点4aを中心として被測定物15側に凸な弧形状をなし、スリット光L1を透過するとともにスリット光L1以外を遮光する。
(もっと読む)
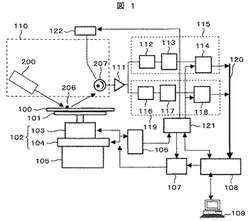
情報処理装置、情報処理方法
【課題】 パターン画像を高速に投影して撮像する為の技術を提供すること。
【解決手段】 ストライプ状の模様が記されたパターン画像を定期的に送信するPC201から、該パターン画像を受信する。パターン画像の送信周期内に、パターン画像におけるそれぞれ異なる水平ラインごとに、該水平ライン上の画素群を繰り返し用いて形成される投影画像を投影部207に入力する。投影部207が投影画像を投影する毎に、該投影のタイミングでカメラ103に撮像させる。
(もっと読む)
測距装置、測距方法および撮像装置、撮像方法
【課題】 カメラやビデオカメラ等において、被写体となる対象の距離を測定する測距装置、測距方法および同装置を備える撮像装置、撮像方法に関する。
【解決手段】 所定の間隔を設けて配置された複数の撮像素子と、各撮像素子上に測距の対象の像を結像させるレンズと、各撮像素子に設定される複数の測距エリアから結像に応じて出力される画像信号に基づいて、測距の対象までの距離を各測距エリアごとに算出する距離算出手段と、算出された距離の分布を生成する距離分布生成手段と、生成された距離の分布に基づいて測距の対象が存在する測距エリア内の位置を特定する測距対象位置特定手段と、を有する測距装置による。
(もっと読む)
3次元形状測定装置、3次元形状測定方法及びプログラム
【課題】複数のカメラ間やカメラとプロジェクタ間での煩雑なキャリブレーションを行うことなく、輝度変化が複雑な被写体においても簡便に被写体の3次元形状を測定する。
【解決手段】露光制御部110は、被写体102と撮像素子104との相対位置を変化させながら、所定の時系列パターンで撮像素子104への露光及び遮光を切り替えて撮像素子104に被写体102を撮像させる。ブレ検出部106は、撮像素子104により撮像された被写体102の画像データ内のブレを検出する。奥行き計算部107は、検出されたブレに基づいて、被写体102の3次元形状を測定する。
(もっと読む)
検出装置
【課題】合焦精度を向上させる。
【解決手段】高感度のラインセンサ16Bは、レーザ照明部11により照明された対象物2の光点像の光量から得られる高輝度の受光データを取得し、低感度のラインセンサ16Aは、対象物2の光点像の光量から得られる低輝度の受光データを取得し、データ処理部17は、正常時は、高感度のラインセンサ16Bからの高輝度の受光データを選択し、高輝度の受光データを得るときのレーザ光が飽和した場合、低輝度の受光データを選択する。そして、検出部18は、データ処理部17により選択された受光データに基づいて、対象物2の像の合焦状態を検出することで、対象物2の像の合焦状態が確実に検出されるので、合焦精度を向上させることができる。本発明は、例えば、対象物の断面形状を測定する測定装置に用いられる位置検出装置に適用することができる。
(もっと読む)
パッケージのサイズを測定するための装置
【課題】正確な測定、使用の容易さおよび効率、適応性および柔軟性を有するレセプターモジュールの複数の信号レセプターを調整する方法を提供する。
【解決手段】各レセプターに対して、(a)レセプターを最大の信号にさらす工程と、(b)レセプターの出力を最大の信号から測定する工程と、(c)レセプターを最小の信号にさらす工程と、(d)レセプターの出力を最小の信号から測定する工程と、(e)最大の信号から所定基準の最大に出力をマッピングし、最小の信号から所定基準の最小に出力をマッピングするマッピング機能を決定する工程と、(f)複数の測定における使用に対して、レセプターモジュールに結合されたローカル制御装置においてマッピング機能を記憶する工程とを含む。
(もっと読む)
対象領域抽出装置
【課題】 距離情報データに含まれるノイズを除去等する。
【解決手段】 対象領域抽出手段B10は、センサB02から得られる輝度情報データに基づいて、所定以上の輝度の存在する隣接画素数がしきい値以下の部分を削除するための輝度情報マスクを生成する。輝度情報マスクを距離情報データに重ね合わせ、輝度情報マスクに重複する領域の距離情報データだけを抽出する。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】光源の光量に変化があった場合であっても、三次元形状を精度良く算出することができる。
【解決手段】三次元形状測定装置1は、メイン光源22が発光した光を縞パターンに変換して測定対象物11上に投影する投影部13と、測定対象物11を撮像する撮像部14と、投影部13が投影する縞パターンの位相を変化させながら、撮像部14に測定対象物11の撮像を繰り返しさせるとともに、縞パターンの画像を複数順に取得する制御部と、メイン光源22の光量の変化量を検出し、当該検出した変化量が所定の値以上である場合に、当該検出した変化量に基づいて前記縞パターンの画像を補正し、当該補正した縞パターンの画像に基づいて、測定対象物11の三次元形状を算出する形状算出部と、を備える。
(もっと読む)
1 - 20 / 140
[ Back to top ]