
Fターム[2F065NN20]の内容
光学的手段による測長装置 (194,290) | 制御 (2,523) | 測定器以外の (526)
Fターム[2F065NN20]に分類される特許
1 - 20 / 526
ガラス基板検査装置及びガラス基板製造方法
表面検査装置、表面検査方法、および露光システム
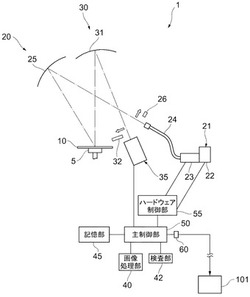
【課題】露光時の走査方向の違いによって生じるスキャン精度の差異を求めることが可能
な表面検査装置を提供する。
【解決手段】露光によって作製されたパターンを有するウェハを照明光で照明する照明系
20と、パターンで反射した照明光を検出する受光系30および撮像装置35と、撮像装
置35により撮像されたウェハの回折画像からパターンの線幅を求め、走査方向によるパ
ターンの線幅の差を求める検査部42とを備えている。
(もっと読む)
検出装置、画像形成装置及びプログラム

【課題】保持部材の第1の方向のたわみを検出する。
【解決手段】第1のイメージセンサは、中間転写ベルトの裏面に形成されたラダーパターンチャートの濃度を測定する。記憶部は、第1のイメージセンサと中間転写ベルトの裏面との間の距離と、この第1のイメージセンサの測定に係るラダーパターンチャートのコントラストとの対応関係を示す第1の関数を記憶する。制御部は、第1のイメージセンサにより測定されたラダーパターンチャートの濃度を用いて、ラダーパターンチャートにおいて隣り合う白領域と黒領域とのコントラストを算出する。制御部は、記憶部に記憶された第1の関数を用いて、算出されたコントラストに対応する距離を特定し、特定した距離を上述した白領域及び黒領域と中間転写ベルトの裏面との間の距離として用いて、中間転写ベルトの幅方向のたわみを検出する。
(もっと読む)
作業位置誘導装置及びその誘導方法
【課題】作業者が作業対象物から目を逸らすことなく、誘導画像を参照しながら作業対象位置を選別できるようにする。
【解決手段】作業時に、ポインティング部11の先端が、作業面の予め既知の作業対象位置に向かうように誘導する場合に、カメラ部13により作業面を撮影し、画面が透過する透明スクリーン部15により、作業時に作業面を見えるようにしながら、誘導用の位置ナビゲーションマーク153及び直交する交差点が誘導中心のライン151,152を表示し、カメラ部13で撮影された画像からポインティング部11の先端の位置を算出し、既知の作業対象位置の位置情報と比較し、両者のずれ量及び方向に基づいて透明スクリーン部15に誘導中心に対する位置ナビゲーションマークを表示し、位置ナビゲーションマークが誘導中心に向かうように移動方向を画面上に指示表示する。
(もっと読む)
精密送り装置および精密移動装置
【課題】高精度な位置検出に基づく高精度な移動および位置決めが可能な精密送り装置および精密移動装置を提供すること。
【解決手段】ベース2に支持されたテーブル31を所定の移動方向へ駆動する精密送り装置9は、テーブル31に接続されたロッド41と、ロッド41を移動方向に進退駆動する駆動機構4と、ベース2に対するロッド41の変位を検出するレーザ干渉計5とを有し、駆動機構4は、ロッド41への駆動力が移動方向の軸線に対して対称に作用するリニアモータ44を有し、レーザ干渉計5のレーザ光路56はロッド41を貫通して移動方向に延びており、ロッド41の移動軸線と駆動機構4の推力軸線とレーザ干渉計5の検出軸線とが一致している。
(もっと読む)
スキージ観察装置及びスキージ観察方法
【課題】基板上にソルダーペーストを印刷するスキージのスキージング中における撓り状態を、精度良く検証することの可能な技術を提供する。
【解決手段】透明な平板材と、平板材の上面に接するようにスキージを保持し、スキージを平板材の上面に沿ってスキージングさせるスキージ駆動手段と、平板材の下方に配置されており、スキージング中のスキージを、平板材を透して撮像する撮像手段と、を備える。スキージのうち、スキージング中の進行方向側に面するスキージ面には、スキージの撓りに応じて変形する所定の模様が設けられている。
(もっと読む)
刻印装置
【課題】刻印試験を短時間で行うこと。
【解決手段】刻印装置1は、鋼片製品を固定する製品固定部2と、刻印試験を行うための鋼片製品と同種の鋼片試料を固定する試料固定部3と、製品固定部2および試料固定部3にそれぞれ固定された鋼片製品および鋼片試料に刻印ピン4bを押圧することによって鋼片製品および鋼片試料の表面に刻印を付与する刻印付与部4と、を備える。このような構成によれば、刻印試験を行う際、製造ラインに製品が搬送されてくるまで待機する必要がなくなるので、刻印試験を短時間で行うことができる。
(もっと読む)
部品実装装置、および、三次元形状測定装置
【課題】影の影響を除去し正確に位相シフト法による三次元データを高速に取得する。
【解決手段】直交する第一方向と第二方向とに撮像画素が行列状に並ぶエリアイメージセンサ111を有するカメラ101と、カメラ101と測定対象物200とを第一方向に相対的かつ連続的に移動させる移動手段102と、第一アングルで第一周期光を照射する第一照射手段131と、第二アングルで第二周期光を照射する第二照射手段132と、第一照射時間と第二照射時間とが重ならないように制御する照射制御手段104と、エリアイメージセンサ111の複数の第一ライン171を用い、第一照射手段131が照射する際の対象部分の像を取得し、複数の第二ライン172を用い、第二照射手段132が照射する際の像を取得する像取得手段105とを備える。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】部品91の三次元認識を正確に実行する。
【解決手段】互いに異なる場所から部品91を撮像した2枚の撮像画像I1、I2に対してステレオマッチング処理が実行されて、2枚の撮像画像I1、I2間の視差pを示す視差画像Isが取得される。また、撮像画像I1からエッジEが抽出されて、部品91のエッジEを示すエッジ画像Ieが取得される。そして、エッジ画像Ieが示す部品91のエッジE上の位置での視差pが、視差画像Isに含まれる視差pから抽出されるとともに、こうして抽出された視差pに基づいて、三次元における部品91の位置および姿勢が認識される。これにより、部品91のエッジE部分の視差pに基づいて、三次元における部品91の位置および姿勢を認識することが可能となり、その結果、この三次元認識を正確に実行することが可能となる。
(もっと読む)
観察装置および観察方法
【課題】透明性基板上に形成された不透明なデバイスパターンを観察像において明確に識別することができる観察方法、および観察装置を提供する。
【解決手段】デバイスパターン3が形成されている側に粘着シート4を貼り付けたうえで透明なステージ7に固定し、ステージ7の上方から同軸透過照明光L1と斜光透過照明光L2とを重畳的に照射するとともに、ステージ7の下方側からステージ7を介して裏面観察手段6で観察することで、観察像においては、デバイスパターン3に対応して、暗い(黒色の)デバイスパターン像が観察され、デバイスパターン像IP1以外の部分は明るく観察される。また、気泡5に対応する部分IB1についても十分に明るく観察される。これにより、観察像においてデバイスパターン3の形状を明確に特定することが可能となる。
(もっと読む)
露光装置及びデバイス製造方法
【課題】 遮光位置のずれを低減する技術の提供。
【解決手段】 原版を光で照明する照明系、前記原版のパターンの像を基板に投影する投影系を有する光学系を備える露光装置で、前記光学系の光路上の前記投影系の物体面と共役な面かその近傍に配置され、前記像が前記基板上に投影される領域の外縁の一部を円弧状に規定する円弧状部を有する遮光板と、前記光学系の光路に沿った回転軸まわりに前記遮光板を回転駆動する回転駆動部と、前記回転軸と交わる方向に前記遮光板をシフトするシフト駆動部と、前記回転駆動部により前記遮光板を回転駆動させ、前記光学系により前記像を前記基板に投影する際の基準となる基準軸と前記回転軸との相対位置の情報を取得する取得部と、前記基板の周辺部に対して前記像を投影する場合、取得した前記相対位置に関する情報に基づき、前記遮光板が所定の位置になるように前記回転駆動部と前記シフト駆動部を制御する制御部を有する。
(もっと読む)
形状測定方法及び形状測定装置
【課題】被検物の表面形状を短時間で測定可能な形状測定方法を提供する。
【解決手段】形状測定方法は、n=1〜N(Nは3以上の整数)とし、参照光の光軸上において異なるN個の位置を第1位置〜第N位置と称するとき、参照面を第n位置に固定し、物体光を被検物の光軸と所定の角度をなす方向から照射して、被検物をその光軸を中心に回転させながら、干渉縞を、被検物上で重複領域を有して隣接し合う複数の領域ごとに取得される複数の第n干渉縞として取得する第n工程を備え、第1工程から第N工程を行う干渉縞画像取得工程S11の後に、複数の領域のそれぞれに対応する干渉縞を用いて位相解析を行い、部分表面形状データを取得する位相解析工程S12と、部分表面形状データを重複領域でつなぎ合わせて被検物の輪帯状領域又は全体の表面形状データを取得する統合工程S13と、を備える。
(もっと読む)
機器制御装置
【課題】複数人で構成されるグループが移動する経路上に設けられた1個以上の機器を到着に先立って制御することができる機器制御装置を提供する。
【解決手段】注視方向検出部2は、グループ内の各人が注視している方向を検出する。方向関係特定部3は、各人が注視している向きと照明機器が存在する方向との関係を特定する。グループ希望方向推定部4は、グループ内の全員について特定した関係に基づいて、グループ全体として照明機器が存在する方向への移動の希望を推定する。制御部5は、グループ希望方向推定部4による推定結果に基づいて、照明機器10_1〜10_Nを制御する。
(もっと読む)
膜厚測定装置及び膜厚測定方法
【課題】被測定対象に施される遮熱コーティングの膜厚を効率良く正確に測定することが可能な膜厚測定装置及び膜厚測定方法を提供することを目的とする。
【解決手段】膜厚測定装置1は、タービン翼11に形成された遮熱コーティング膜の膜厚を測定するECTセンサ4と、遮熱コーティング膜の膜厚を測定する地点であるタービン翼11上の測定地点を記憶している記憶手段9と、タービン翼11の形状を測定するレーザ変位計5と、レーザ変位計5によって測定された測定されたタービン翼11の形状と、記憶手段9に記憶されているタービン翼11上の測定地点に基づいて、ECTセンサ4による実際の膜厚測定に適した実測定地点を算出する測定位置算出手段8と、測定位置算出手段8によって算出された実測定地点に基づいて、ECTセンサ4を駆動して、ECTセンサ4の測定位置を調整するアーム駆動手段6とを備える。
(もっと読む)
ワーク位置検出システム
【課題】透明体であるワークの安定的な位置を検出することができるワーク位置検出システムを提供する。
【解決手段】透明体であるワークの端面が発光するように光を照射する少なくとも一つの投光部(21a〜21c)と、光によってワークの端面に生じた発光箇所を撮像する撮像部(22a、22b)と、撮像部による撮像結果に基づいてワークの位置を検出する検出部と、を有する。
(もっと読む)
動きを検出するシステム、リソグラフィ装置、およびデバイス製造方法
【課題】誤差の影響を受けにくいが大きな空間を占有しない、改善された精密測定システムを提供する。
【解決手段】本体の動きを検出するシステムであって、本体と、基準フレームに対して実質的に静止して取り付けられた第1回折格子40,42と、本体に取り付けられた第2回折格子50,52と、第1および第2回折格子で回折された一つ以上の放射ビームを受け取り、基準フレームに対する本体の動きを検出するように構成された検出器60,61,62,63と、を備え、検出器60,61,62,63が本体に結合され、本体に対して移動可能である。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層UVRに接触した状態で、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを、1つの認識手段により、両アライメントマークALが重なる方向から同時に撮像して得られた1つの画像から両アライメントマークALの位置を別々に認識処理することで原板Mと基板Sとのアライメントを行う。そのため、撮像された原板Mおよび基板Sのアライメントマーク画像に相対的な位置誤差が生じるおそれがなく、振動や異なる走査タイミングに起因する位置誤差が生じることを防止できる。
(もっと読む)
車両用ミラー制御装置
【課題】車両用ミラーの鏡面角度をドライバにとって好適な角度に自動的に調整しながらも、乗員にとっての快適性を損ない難くすることを可能にする。
【解決手段】車両が走行中と判定した場合であって、且つ、いずれかの車両用ミラーをドライバが見ていると判断した場合には、ドライバが見ている車両用ミラーであると判断した車両用ミラーの最適角度を算出し、その算出結果に基づいて当該車両用ミラーについてのみ鏡面角度の調整を行う一方、車両が走行中でないと判定した場合、若しくは車両が走行中と判定した場合であって、且つ、いずれの車両用ミラーもドライバが見ていると判断しなかった場合には、車両用ミラーの鏡面角度の調整を行わない。
(もっと読む)
位置制御システム、露光装置、及び露光方法
【課題】1つの実施形態は、例えば、基板の表面の位置の計測精度を向上できる位置制御システム、露光装置、及び露光方法を提供することを目的とする。
【解決手段】1つの実施形態によれば、面位置計測部と制御部とを有する位置制御システムが提供される。面位置計測部は、基板の表面の高さ方向の位置を計測する。制御部は、面位置計測部による計測結果に基づいて、光学系と基板の表面との相対的な位置を制御する。面位置計測部は、複数のフォーカスセンサ41−1〜41−3と駆動部42とを有する。駆動部は、基板の表面に対する複数のフォーカスセンサの基板面内方向の位置を独立して駆動する。
(もっと読む)
車両運転支援装置、道路の路肩を検出する方法および該方法に基づく車両運転支援方法
【課題】本発明は、実際の道路環境において、反射光(楕円偏光)の楕円軸が車両の車軸方向あるいは高さ方向に対して傾いている場合であっても、正確に路肩を検出することができる新規な車両運転支援装置を提供することを目的とする。
【解決手段】偏光撮像手段の画素毎に直交する2つの偏光方向をもつ偏光素子を設け、該偏光素子の偏光検出軸を所定の角度範囲で変更させながら、2つの偏光方向に対応する光強度の比を監視し、当該光強度比が最初の極値に達したときの光強度に基づいて偏光状態特徴量を算出する。この偏光状態特徴量が所定の閾値を超える領域を路肩として検出し、その位置情報に基づいて、操舵制御手段、走行速度制御手段、警告手段等を制御することによって車両の運転支援を行う。
(もっと読む)
1 - 20 / 526
[ Back to top ]