
Fターム[2F065PP01]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622)
Fターム[2F065PP01]の下位に属するFターム
Fターム[2F065PP01]に分類される特許
1 - 20 / 320
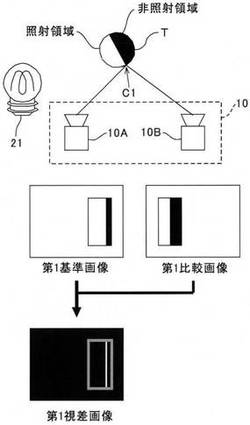
画像解析装置及びこれを用いた物体検出装置
【課題】対象物体上の外表面形状によらず、対象物体までの距離を利用した適正な制御や処理を実現することを課題とする。
【解決手段】自動車に搭載された2つのカメラ10A,10Bで自車両周囲の撮像領域を撮像して得られる複数の撮像画像を解析して対象物体までの距離を算出する際、撮像領域に向けて互いに異なる方向から非可視光を照射する2つの光照射部21,22の光照射時期が互いに重複しないように交互に非可視光を照射し、当該非可視光の照射によって対象物体の外表面に生じる非可視光の照射領域と非照射領域との境界線C1,C2上の同一の地点を映し出す対応点を光照射時期ごとにそれぞれ特定し、光照射時期ごとに、対応点のズレ量に基づいて距離を算出する。
(もっと読む)
作業位置誘導装置及びその誘導方法

【課題】作業者が作業対象物から目を逸らすことなく、誘導画像を参照しながら作業対象位置を選別できるようにする。
【解決手段】作業時に、ポインティング部11の先端が、作業面の予め既知の作業対象位置に向かうように誘導する場合に、カメラ部13により作業面を撮影し、画面が透過する透明スクリーン部15により、作業時に作業面を見えるようにしながら、誘導用の位置ナビゲーションマーク153及び直交する交差点が誘導中心のライン151,152を表示し、カメラ部13で撮影された画像からポインティング部11の先端の位置を算出し、既知の作業対象位置の位置情報と比較し、両者のずれ量及び方向に基づいて透明スクリーン部15に誘導中心に対する位置ナビゲーションマークを表示し、位置ナビゲーションマークが誘導中心に向かうように移動方向を画面上に指示表示する。
(もっと読む)
光ファイバセンサとこれを用いた測定方法
【課題】所望位置へ簡単に配設でき安価に実施できるうえ、配管など被測定物の歪や温度等を長期にわたって正確に測定できるようにする。
【解決手段】光ファイバセンサ(1)は、光ファイバ(2)と、その周囲に配置された連続繊維(3)と、連続繊維(3)に含浸された結合剤とを備える。光ファイバ(2)は、中間部を連続繊維(3)で製紐された筒状の紐体(5)内に収容してある。紐体(5)の内周長は光ファイバ(2)の外周長よりも長く、一部が光ファイバ(2)の外周面に当接され、残部が紐体(5)の内周面同士で互いに当接してある。紐体(5)の外周面に、紐体(5)の長さ方向に延びた着座面(16)が形成してある。着座面(16)を被測定物(14)の表面へ当接した状態で、固定部材(17)で光ファイバセンサ(1)を被測定物(14)側へ押圧して固定する。光ファイバ(2)の端部に測定器(15)を接続して、被測定物(14)の歪や温度を測定する。
(もっと読む)
リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境
【課題】リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境を提供する。
【解決手段】編集に現実的なコンテキストを生成するために、パートプログラムのすべての先行命令の実行を必要とせずに、前に保存されたデータを使用する代理データ動作が、特定の命令セットの実行に取って代わる。代理データは、パートプログラムに記録される動作の実際の実行中に保存し得る。実行の編集モードは、そのデータを代理と置換して、そのデータを生成するであろう動作を実行する。コンテキスト生成で大量の時間節約を達成し得、それにより、編集は動作コンテキスト内で行うことができ、動作コンテキストは略リアルタイムで正確性のために繰り返しリフレッシュし得る。これは、マシンビジョンシステムの固有のユーザインタフェースを使用して、比較的未熟なユーザによる都合のよいプログラム変更をサポートする。
(もっと読む)
光ファイバセンサとこれを用いた測定方法、および光ファイバセンサを備えたコンクリート構造物
【課題】所望位置へ簡単に配置でき安価に実施できるうえ、コンクリート構造物の歪や温度等を簡単に且つ正確に測定できるようにする。
【解決手段】光ファイバセンサ(1)は、光ファイバ(2)と、その周囲に配置された連続繊維(3)と、連続繊維(3)に含浸された結合剤とを備える。光ファイバ(2)は、長さ方向の中間部が、連続繊維(3)で製紐された紐体(5)により被覆してある。光ファイバ(2)には、紐体(5)で覆われた部位に1又は複数のFBG(9)が形成してある。光ファイバ(2)の端部をコンクリート構造物(14)の表面に取り出した状態で、コンクリート構造物(14)の内部に、光ファイバセンサ(1)の中間部を一体的に埋設する。取り出された光ファイバ(2)の端部に測定器(15)を接続して、コンクリート構造物(14)の歪や温度を測定する。
(もっと読む)
三次元位置・姿勢認識装置、産業用ロボット、三次元位置・姿勢認識方法、プログラム、記録媒体
【課題】部品91の三次元認識を正確に実行する。
【解決手段】互いに異なる場所から部品91を撮像した2枚の撮像画像I1、I2に対してステレオマッチング処理が実行されて、2枚の撮像画像I1、I2間の視差pを示す視差画像Isが取得される。また、撮像画像I1からエッジEが抽出されて、部品91のエッジEを示すエッジ画像Ieが取得される。そして、エッジ画像Ieが示す部品91のエッジE上の位置での視差pが、視差画像Isに含まれる視差pから抽出されるとともに、こうして抽出された視差pに基づいて、三次元における部品91の位置および姿勢が認識される。これにより、部品91のエッジE部分の視差pに基づいて、三次元における部品91の位置および姿勢を認識することが可能となり、その結果、この三次元認識を正確に実行することが可能となる。
(もっと読む)
エゴモーション概算システムおよび方法
【課題】エゴモーション概算システムおよび方法の提供。
【解決手段】エゴモーション概算システムを利用してエゴモーションパラメータを決定するためのコンピュータ実施方法であって、第1の画像フレームおよび第2の画像フレームを取得することと、第1の画像フレームの第1の部分を選択して第1のサブ画像を取得し、かつ第2の画像フレームの第2の部分を選択して第2のサブ画像を取得することと、第1のサブ画像および第2のサブ画像に変換を実行して、それぞれ、第1の透視画像および第2の透視画像を取得することと、第2の透視画像を反復的に調整して複数の調整した透視画像を取得することと、第1の透視画像と複数の調整した透視画像との個々の差異それぞれに対応する複数の差分値を決定することと、複数の差分値のうちの1つに対応する、エゴモーションパラメータに関する並進ベクトルを決定することと、を含む、方法。
(もっと読む)
柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置
【課題】本願発明の課題は、柱状物体の空間情報を得るためには多くの労力と時間を要する、大量の柱状物体を漏れなく抽出することが難しい、あらかじめ柱状物体を認識しなければならない、といった問題を解決することであり、大量の計測データの中から、正確かつ短時間で、柱状物体を自動抽出する柱状物体抽出方法、柱状物体抽出プログラム、及び柱状物体抽出装置を提供することにある。
【解決手段】本願発明の柱状物体抽出方法は、計測点群から柱状物体を抽出する方法であり、計測点群からそれぞれ独立した領域ごとにセグメントデータを得るセグメンテーション工程と、細線化処理を行うことで立設物形状データを得る細線化工程と、主成分分析を行って固有値から算出される特徴量に基づいて形状分類を与える形状分類工程と、特徴量等に基づいて立設物の柱状判定を行う柱状物体判定工程を備える方法である。
(もっと読む)
光ファイバセンサおよび光ファイバセンシング方法
【課題】測定精度を向上させた光ファイバセンサおよび光ファイバセンシング方法を提供すること。
【解決手段】パルス状のポンプ光を出力する光源と、前記ポンプ光が入力され、該ポンプ光によってブリユアン散乱光を発生するセンサ用光ファイバと、前記センサ用光ファイバから出力された前記ブリユアン散乱光を受光する受光器と、を備え、入力される前記ポンプ光のパルスの長さの1/2をΔz(m)、ピーク光強度をIp(mW)とすると、前記センサ用光ファイバは、長さをz(m)、伝送損失をa(dB/km)、ブリユアン利得係数gBと有効コア断面積Aeffとの比をgB/Aeff(m−1W−1)とした場合に、所定の式を満たすように長さzが設定されている。
(もっと読む)
光ファイバセンサのための方法およびシステム
【課題】軸受の複数のパラメータを検出する光ファイバ感知デバイスのための方法およびシステムを提供する。
【解決手段】光ファイバセンサシステムは、光ファイバケーブルと、1つまたは複数の分離タブ218によって互いに接合された第1の接続端と第2の接続端204を含むキャリア200とを備え、第1の接続端は、光ファイバケーブルの遠位端を第1の接続端に固定するように構成された第1のファイバ取付け点210を含み、第2の接続端は、光ファイバケーブルを第2の接続端に固定するように構成された第2のファイバ取付け点212を含み、さらに1つまたは複数の分離タブは、キャリアおよび分離タブよりも構造的に弱いブレークエリアを使用して第1の接続端と第2の接続端に接合されている。
(もっと読む)
計測装置
【課題】計測装置の測長軸の調整を不要とし、簡便な取り付け及び光学素子の汚染防止の点で有利な技術を提供する。
【解決手段】参照面と被検面との間の距離を計測する計測装置であって、光源からの光を分割させる光分割素子と、前記参照面、前記被検面及び前記光分割素子を内部に収納すると共に、前記内部において前記参照面及び前記光分割素子を固定するハウジングと、前記ハウジングの外部に設けられ、前記光分割素子から前記参照面までの第1の光路長と前記光分割素子から前記被検面までの第2の光路長とが等しくなるときの前記被検面の位置を示す測長基点を表示する第1の表示部と、前記ハウジングの外部に設けられ、前記第2の光の光路に平行な軸を示す測長軸を表示する第2の表示部と、前記参照面と前記被検面からの反射光との干渉信号から前記参照面と前記被検面との間の距離を算出する処理部と、を有することを特徴とする計測装置を提供する。
(もっと読む)
車両用画像生成装置及び車両用画像生成方法
【課題】車両周囲画像に含まれる他車両の任意視点から見た画像を、より正確に生成する装置を提供する。
【解決手段】車両用画像生成装置を、3次元構造を有する車両周囲画像に含まれる他車両の可視画像部分の画像情報に基づき、他車両の死角部位の形状や色などの情報を推測する死角情報推測部25と、死角情報推測部25で推測された死角情報に基づき、可視画像部分データから死角部位を補完するための補完画像データを生成し、生成した補完画像データを用いて他車両の死角部位の画像を補完する画像補完部26と、仮想視点設定部27から入力される仮想視点情報に基づき、補完後の車両周囲画像を仮想視点情報の示す視点から見た画像に再構成する画像再構成部28と、を含む構成とした。
(もっと読む)
かぶりコンクリートの剥落形状計測装置、及び、かぶりコンクリートの剥落形状計測方法
【課題】作業性に優れたかぶりコンクリートの剥落形状計測装置を実現し、実際のかぶりコンクリートの剥落部を現場で計測可能とする。
【解決手段】剥落形状計測装置2は、分解自在で可搬性のあるフレーム部4の天板部10にリニアガイド12を固定し、リニアガイド12の下面に、案内方向と計測方向とが直交するようにして2次元走査可能なレーザ変位センサ5をスライド移動自在に支持する。把持部4を持って測定対象の剥落部32を覆うようにして装置を固定する。その際、リニアガイド12の案内方向が剥落部32の鉄筋30の方向に平行となるようにする。そして、鉄筋30の長手方向に沿ってレーザ変位センサ5の計測位置を移動させては計測することを繰り返して、剥離部32の3次元の形状を計測する。
(もっと読む)
画像処理によるトロリ線摩耗測定装置
【課題】ラインセンサ画像中のトロリ線とトロリ線以外の物体とを切り分け、トロリ線摩耗面の誤検出を低減することを可能とした画像処理によるトロリ線摩耗測定装置を提供する。
【解決手段】車両の内部に設置された処理用コンピュータが、車両の屋根上に設置されてトロリ線を撮影するラインセンサカメラ2から入力される画像信号を時系列的に並べてなるラインセンサ画像を作成するラインセンサ画像作成部4aと、入力された画像に対してGSTH処理を行ってGSTH画像を作成するGSTH処理部4bと、入力された画像に対して二値化処理を行って二値化画像を作成する二値化処理部4cと、入力された画像に対してトロリ線の摩耗部分の両側のエッジを検出するトロリ線摩耗部エッジ検出部4dと、摩耗部分の両側のエッジの位置からトロリ線の摩耗量を検出するトロリ線摩耗部幅計算部4eとを備える構成とした。
(もっと読む)
測距装置
【課題】対象物が存在する路面の勾配の影響を適切に補償しつつ、車載カメラによる撮像画像を用いて対象物と自車両との間の距離を精度よく測定することができる測距装置を提供する。
【解決手段】互いに異なる撮像時刻での車載カメラ2の2つの撮像画像から、自車両1からの距離が第1撮像画像の撮像時刻での対象物53の接地点P53と同じになる静止点Pの投影点となる特徴点を抽出する。計測したカメラ運動パラメータと、各撮像画像の特徴点の位置と、車載カメラ2の高さHcの値とから、車載カメラ2の下方に位置する路面51上の点から対象物存在路面52上の静止点に至る直線L2が車載カメラ2の光軸Lcに対してなす角度θを所定の演算式に基づいて推定する。角度θの推定値を用いて対象物53と自車両1との間の距離Dを推定する。
(もっと読む)
測距装置
【課題】単一の車載カメラによる撮像画像を利用する安価なシステム構成で、該車載カメラにより撮像される対象物と自車両と対象物との間の距離を高い信頼性で行なうことができる測距装置を提供する。
【解決手段】撮像画像から抽出された対象物53の撮像画像中でのサイズと標準サイズ値との比率を基に、第1距離推定値D1を決定する。また、自車両1からの距離が対象物53の接地点P53と同じになる静止点Pを撮像画像に投影してなる特徴点を抽出し、少なくともその特徴点の位置に基づいて第2距離推定値D2を決定する。第2距離推定値D2が所定の許容範囲に収まっているか否かを判断し、その判断結果に応じて、第1距離推定値D1と第2距離推定値D2とのうちの一方を対象物53の自車両1からの距離の推定値として確定する。
(もっと読む)
カメラキャリブレーション装置
【課題】車両の停車誤差の影響を排除できるキャリブレーションを簡易な設備で実施する。
【解決手段】自車12の形状に対応した2点と交わる線を含み、カメラ10の撮像範囲内に少なくとも2本配置される参照線RLと、この参照線RLの間に予め定められたパターン形状を有する校正用パターンPPとを有する測定領域MAと、画像処理部14とを備えている。そして、画像処理部14が、カメラ10で校正用パターンPP及び参照線RLが配置される測定領域MAを撮影することで前記測定用画像IMを生成する撮像処理18と、前記2本の前記参照線RLに基づいて前記自車12の停車位置と前記パターン形状との座標関係を停車誤差として算出する停車誤差算出処理20と、当該停車誤差をキャンセルした状態で前記パターン形状に基づいて前記カメラ10の取付姿勢に対応する外部パラメータを算出する外部パラメータ算出処理22とを備えた。
(もっと読む)
レール凹凸測定装置
【課題】レールの凹凸をレール長手方向に連続測定するレール凹凸測定装置を提供する。
【解決手段】測定レール(R1)上を走行可能な測定車両(10)と、測定車両(10)の進行距離を測定する距離センサ(31)と、測定車両(10)に取り付けられると共に測定レールの長手方向に不均等な間隔で順に直列に配置された第1、第2および第3の変位センサ(21、22、23)からなる変位センサ群(20)を有し、第1、第2および第3の変位センサ(21、22、23)のうち少なくとも1つの変位センサは位置について変更可能である。
(もっと読む)
FBGひずみセンサ
【課題】センサ全体を大型化することなく、簡単な構成で温度補償を行うことを実現したFBGひずみセンサを提供することを目的とする。
【解決手段】FBGひずみセンサ1は、FBG3が形成された光ファイバ2と、光ファイバ2を被測定部Wに固定するための温度補償部材11とを備えている。光ファイバ2と温度補償部材11とは、これらが当接する全面において接着剤12によって固定されている。一方、温度補償部材11と被測定部Wとは、温度補償部材11の両端部において接着剤13によって固定されている。温度補償部材11は、熱膨張係数がゼロである材料から形成されており、FBG3の伸縮が温度補償部材11によって拘束されている。したがって、雰囲気温度に応じたFBG3の熱膨張は温度補償部材11によって抑制された状態となっており、被測定部Wに生じるひずみのみがFBG3に印加される。
(もっと読む)
測定用工具を合わせるための工具ホルダ、測定装置、及びその測定装置の校正方法
【課題】改良した校正機構によって工具ホルダでより正確な校正を行うことができる測定装置につき、当該測定装置で測定される工具を合わせるための工具ホルダを提供する。更に、そのような測定装置と、その測定装置の校正に適した方法を提供する。
【解決手段】測定装置で測定される工具を合わせるための工具ホルダは、当該工具ホルダの垂直軸を規定する対称軸22を有する固定可能な本体20と、当該工具ホルダに取り付けられる工具用に規定された工具のゼロ点23と、前記工具の前記ゼロ点23から所定の水平距離及び所定の垂直距離を隔てた校正機構24と、を備え、前記校正機構24は、前記工具の前記ゼロ点23を含む垂直線の所定高さに半円状外縁部を備え、前記半円状外縁部の中心角が135°を上回るように構成されている。
(もっと読む)
1 - 20 / 320
[ Back to top ]