
Fターム[2F065PP04]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622) | 3次元駆動 (250)
Fターム[2F065PP04]に分類される特許
1 - 20 / 250
位置姿勢計測装置、その処理方法及びプログラム
3次元形状測定装置
【課題】3次元形状の測定精度をより改善できる3次元形状測定装置を提供すること。
【解決手段】本発明の3次元測定装置は、測定対象物を固定するワークステージと、光源、光源から照射された光を透過させる格子及び格子の格子イメージを測定対象物に結像させる投影レンズを含み、測定対象物に対して格子イメージを第1方向にN回入射した後、測定対象物に格子イメージを第2方向にN’回入射する投影部と(N及びN’は2以上の自然数)、結像レンズ及びカメラを含み、測定対象物によって反射される第1方向反射イメージ及び第2方向反射イメージを受信するイメージ取り込み装置と、イメージ取り込み装置に受信された第1方向反射イメージ及び第2方向反射イメージを用いて測定対象物の影領域を補償して測定対象物の3次元状態を算出する制御部と、を含む。
(もっと読む)
リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境

【課題】リアルタイムコンテキスト生成機能を含むマシンビジョンシステムプログラム編集環境を提供する。
【解決手段】編集に現実的なコンテキストを生成するために、パートプログラムのすべての先行命令の実行を必要とせずに、前に保存されたデータを使用する代理データ動作が、特定の命令セットの実行に取って代わる。代理データは、パートプログラムに記録される動作の実際の実行中に保存し得る。実行の編集モードは、そのデータを代理と置換して、そのデータを生成するであろう動作を実行する。コンテキスト生成で大量の時間節約を達成し得、それにより、編集は動作コンテキスト内で行うことができ、動作コンテキストは略リアルタイムで正確性のために繰り返しリフレッシュし得る。これは、マシンビジョンシステムの固有のユーザインタフェースを使用して、比較的未熟なユーザによる都合のよいプログラム変更をサポートする。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】計測精度を向上させることができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、計測対象物を撮像したカメラの姿勢と、物体を撮像した仮想的なカメラの姿勢とが近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。また、CPU34cは、これら2種類のカメラの光学系または撮像素子の特性が互いに近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。CPU34cは、これらの調整を行った後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
移動環境認識装置及び方法
【課題】高精度に測定対象の形状認識情報を得る。
【解決手段】測定対象までの距離画像データを得る距離画像測定工程ステップST1と、この距離画像測定工程で得た距離画像データに基づき、所定のデータの集合体からなるラベリング領域を作成するラベリング処理工程ステップST2〜ステップST7と、このラベリング処理工程で作成した複数のラベリング領域に基づいて複数の上面データを形成する上面データ形成工程ステップST8と、この上面データ形成工程で形成した複数の上面データに基づいて測定対象の形状を認識する形状認識工程ステップST9〜ステップST13と、を備えた移動環境認識方法である。
(もっと読む)
管端検査装置
【課題】管端部の加工部について、寸法精度と加工面の状態とを共に自動的に検査することができ、しかもインライン化が可能なよう検査装置全体のコンパクト化を可能にした、管端検査装置を提供する。
【解決手段】端部を加工した管2の管端加工部を検査する管端検査装置である。管端加工部の形状を計測するレーザ変位計42と、管端加工部の表面を撮影する撮像装置62と、レーザ変位計42及び撮像装置62を管端加工部の周方向に沿って移動させることにより、レーザ変位計42のレーザビームスポット及び撮像装置62の焦点を管端加工部の周方向に沿って周回させる回転テーブル(周回手段)と、を備える。
(もっと読む)
ボンディング装置
【課題】サーチ動作又はボンディング前のボンディング点の高さ測定を行うことなしに、高速でボンディングが可能なボンディング装置を提供すること。
【解決手段】上下方向に揺動可能なボンディングアームに搭載されて、被ボンディング部品の表面に位置するボンディング点の合焦点の検出を行う共焦点光学系と、前記ボンディングアームと一体に可動してボンディングを行うボンディングツールと、前記ボンディングツールの位置を検出する位置検出手段と、を有し、ボンディングツールのボンディング点への下降中に、共焦点光学系による合焦点検出により位置検出手段で検出したボンディングツールの位置から、前もって設定したボンディング点までの所定の距離(合焦点基準下降量)をボンディングツールが下降して、ボンディング点上で停止するように制御する。
(もっと読む)
3次元位置・姿勢認識装置およびその方法、プログラム
【課題】本発明は、対象体本来の形状のうち部分的な形状の情報を欠いた計測点群を用いる場合であっても、対象体の3次元位置・姿勢を適切に認識可能な3次元位置・姿勢認識装置およびその方法、プログラムの提供を目的とする。
【解決手段】本発明にかかる3次元位置・姿勢認識装置は、計測点群と、対応するモデル点群とをマッチングさせ、モデル点群のうち、マッチング結果に基づいて特定される点を削除処理するモデル処理手段10と、計測点群と、モデル処理手段10において削除処理したモデル点群とをマッチングさせ、対象体3の3次元位置・姿勢を認識する認識手段11とを備えることを特徴とする。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層UVRに接触した状態で、原板Mおよび基板Sのそれぞれに形成されたアライメントマークALを、1つの認識手段により、両アライメントマークALが重なる方向から同時に撮像して得られた1つの画像から両アライメントマークALの位置を別々に認識処理することで原板Mと基板Sとのアライメントを行う。そのため、撮像された原板Mおよび基板Sのアライメントマーク画像に相対的な位置誤差が生じるおそれがなく、振動や異なる走査タイミングに起因する位置誤差が生じることを防止できる。
(もっと読む)
表面形状測定方法および装置
【課題】 表面形状測定において、測定対象面と参照面からの反射光により干渉縞を発生させ、各画素の位相を単色光ごとに求め、表面形状を測定において、波長の異なる複数の単色光を得る場合は、抽出手段を増設する必要が生じていた。
【解決手段】 照射手段を介して測定対象面と参照面に波長の異なる複数の単色光を照射し、測定対象面と参照面の両方から反射して同一光路を戻る反射光によって生じる干渉縞の強度値に基づいて、測定対象面の表面高さと表面形状を求める表面形状測定方法において、前記照射手段が、広帯域な波長特性を有する照射光から、音響光学フィルタを用いて任意の異なる波長の単色光を複数抽出し、同時に混在して照射する照射手段を用いる。
(もっと読む)
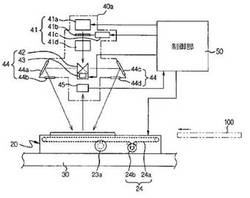
円形状測定方法および装置
【課題】高価な専用装置を用いることなく、平面上の円形パターンをマルチステップ法により高精度に測定できる円形状測定方法および装置を提供する。
【解決手段】円形パターンを有する被測定物Wを載置するテーブル10、テーブルの回転機構20、画像プローブ30、画像プローブを移動させる移動機構40、制御装置50を有する円形状測定装置を準備する。画像プローブを円形パターンの円周に沿って移動させながら、円形パターンの円周を360°/mピッチで測定する工程と、円形パターンの中心を基準に360°/mだけテーブルを回転させて円形パターンの円周上の同一点を測定する測定動作を、360°/mずつテーブルを回転させながら合計m回行ってm個の測定データを取得する工程と、このm個の測定データから円形パターンの形状成分を求める工程を備える。
(もっと読む)
転写方法および転写装置
【課題】原板が有する凹凸パターンを容易にかつ高い位置精度で基板上の転写液層にインプリントすることのできる技術を提供する。
【解決手段】原板Mの凹凸パターンP面が基板S上に塗布された転写液層に接触した状態で、原板Mおよび基板のそれぞれに形成されたアライメントマークを、1つの認識手段3により、両アライメントマークが重なる方向から、一方のアライメントマークを撮像した後、他方のアライメントマークを撮像し、得られた両アライメントマークの画像にそれぞれ位置誤差補正処理を行う。そのため、補正後の両アライメントマーク画像を用いて高精度なアライメントを行うことが可能になる。
(もっと読む)
高さ計測装置及び方法
【課題】被計測物が様々な屈折率で、かつ様々な厚さの透明媒質の下に配置されていても、その被計測物の高さを容易に計測する。
【解決手段】高さ計測装置1は、照明光から分岐された第1照明光を被計測物6に導く対物レンズ24と、照明光から分岐された第2照明光を参照ミラー28に導く対物レンズ26と、第2照明光の光路長を調整する移動部36と、被計測物6及び参照ミラー28で反射される2つの照明光の干渉像を撮像する高速度カメラ12と、対物レンズ24と被計測物6とを光軸方向に相対移動するピエゾ駆動装置18と、を備える。
(もっと読む)
3次元形状測定方法及び装置並びに3次元形状測定用顕微鏡装置
【課題】段差部を有する鏡面反射性物体の形状を高精度に測定することが可能な3次元形
状測定方法及び装置並びに3次元形状測定用顕微鏡装置を提供する。
【解決手段】デフレクトメトリの手法を用いて被検面4の局所スロープ情報及び形状情報
を求めた後、投影光学系2による面光源1の共役位置3が記被検面4上に位置するように
設定するとともに、開口絞り22の絞り半径を小さくして、面光源像を被検面4に投影す
る。観察光学系5により観察される面光源画像における歪情報と、先に求めた局所スロー
プ情報及び形状情報に基づき、被検面が有する段差部の段差量情報を求め、その段差量情
報に基づき形状情報を補正する。
(もっと読む)
測定装置
【課題】内径の異なる種々の穴形状を精度良く測定できる測定装置を提供すること。
【解決手段】被測定領域の少なくとも一部の面の法線方向とは異なる方向から前記被測定領域に照明光を照射することで被測定領域に帯状の照明領域を形成する照明系と、前記照明系による照射方向と前記帯状の照明領域における長手方向等を含む面からはずれた位置から照明領域の散乱光を受光する受光系と、受光系の受光結果に基づいて被検面の形状を算出する演算部と、を備える。
(もっと読む)
測定装置
【課題】被測定面の形状を高精度に測定することができる技術を提供する。
【解決手段】被測定面の形状を測定する測定装置であって、前記被測定面に接触する接触部材を含むプローブを保持するプローブハウジングと、前記被測定面に対する位置及び姿勢が固定され、前記被測定面の形状を測定するための基準となる基準ミラーと、前記基準ミラーと前記プローブとの間の第1距離を測定する第1距離測定部と、前記プローブハウジングと前記プローブとの間の第2距離を測定する第2距離測定部と、前記第2距離測定部で測定される前記第2距離が一定距離となるように前記プローブハウジングを駆動させながら前記第1距離測定部で測定される前記第1距離から前記接触部材の位置を特定し、当該接触部材の位置に基づいて前記被測定面の形状を算出する処理部と、を有する。
(もっと読む)
形状測定装置
【課題】測定範囲および測定精度を調整・変更可能なプローブを備えた形状測定装置を提供する。
【解決手段】ワークに直線状の光を照射する光照射部と、光照射部から照射された光のワークからの反射光を撮像する撮像素子32と、ワークからの反射光を撮像素子32の撮像面に結像させる結像レンズ31と、を備え、光照射部の光照射面と、結像レンズ31の主点を含む主平面と、撮像素子32の撮像面とが、シャインプルーフの条件を満たした形状測定装置であって、撮像素子32の撮像面を複数の領域(S1〜S3)に分割し、測定精度及び/又は測定範囲の大きさに応じて、複数の領域から測定に利用する領域を画像取得領域として選択する制御部10を備える。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】検出部を被検物に対して移動させて測定位置毎に停止させて測定する場合の測定速度を向上させることができる形状測定装置を提供する。
【解決手段】形状測定装置は、被検物に対しての相対位置が変更されて被検物の表面の形状を検出する検出部(20)と、検出部により検出された被検物の表面の形状の変位を示す情報に基づいて、被検物に対して検出部が相対的に静止しているか否かを判定する判定部(静止判定部58)と、判定部により検出部が相対的に静止していると判定された場合の形状に基づいて、被検物の表面の形状データを算出する算出部(座標算出部53)と、を備える。
(もっと読む)
形状測定装置、形状測定方法、及びそのプログラム
【課題】穴のある被検物に対して、その穴の内側の形状を効率よく適切に測定することができる形状測定装置を提供する。
【解決手段】中空状の被検物の内面に測定光を照射するとともに、該被検物に照射した測定光を受光して、被検物の形状を測定する形状測定装置は、被検物に照射するライン状の測定光を出力する光出力部と、光出力部と隔てて設けられ、予め定められた方向から受光する測定光の散乱光を検出する受光部と、測定光を検出する位置に応じて受光部の位置が調整され、照射した光の出力位置と、受光部の位置との距離に応じて被検物との距離を算定する制御部と、を備える。
(もっと読む)
形状測定装置
【課題】複雑な形状の被測定物に対して精度を高めて測定する。
【解決手段】形状測定装置(100)は、被測定物にライン光を照射する光照射部(21)及びライン光の照射方向とは異なる方向から被測定物に照射されたライン光を検出する光検出部(22)を有するセンサー部(2)と、光検出部(22)からの検出結果に基づいて被測定物の形状を測定する形状測定部(53)と、センサー部(2)と被測定物とを相対移動させる駆動部(11)と、測定方向に相対移動する間に形状測定部(53)によって得られた複数回の測定の結果に基づいて、測定時のセンサー部(2)と被測定物との少なくとも一方の姿勢を制御する測定制御部(56)とを備える。
(もっと読む)
1 - 20 / 250
[ Back to top ]