
Fターム[2F065PP05]の内容
光学的手段による測長装置 (194,290) | 装置全体の構造 (6,881) | 検出器の支持、保持関連 (1,622) | 首振り (348)
Fターム[2F065PP05]に分類される特許
1 - 20 / 348
測定補助器具、レーザトラッカー、およびこれらを用いた直径測定方法
対象検出装置および対象検出方法
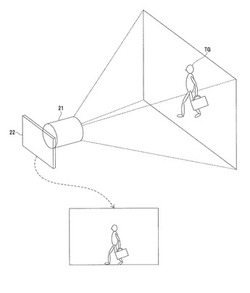
【課題】より広範囲かつ高速に対象を検出することが可能な対象検出装置および対象検出方法を提供する。
【解決手段】対象検出装置101は、検出対象の物性に応じて予め選択された複数の波長帯について、2次元画像を撮像するための撮像部11と、2次元画像の各画素における物質を検出するための検出部12とを備え、撮像部11は、設定されたラインごとに2次元画像を撮像する。
(もっと読む)
無人走行体の遠隔操縦システム

【課題】通常のカメラによっては鮮明な環境情報を取得することが困難な環境に無人走行体が投入された場合にも、無人走行体を正確、容易かつ高能率に遠隔操縦可能な遠隔操縦システムを提供する。
【解決手段】無線無人走行体5に、レーザ光走査式三次元測距装置106と、往路前方カメラ112と、メインカメラ113と、復路前方カメラ115と、俯瞰カメラ118とを搭載する。安全な場所に設置された表示装置に、レーザ光走査式三次元測距装置106により検出された三次元画像と、各カメラ112,113,118により撮影された映像を表示する。オペレータはこれらの三次元画像及びカメラ画像を参照しながら、無線無人走行体5の遠隔操縦を行う。
(もっと読む)
形状測定装置の組み付け誤差補正方法、および補正用治具
【課題】補正用治具の交換なしに形状測定装置の組み付け誤差をX方向、Y方向、θ方向のすべてについて補正できるようにする。
【解決手段】ワーク支持部1と、これに支持されたワークの外周縁にレーザ光を照射し、そこからの反射光を受光して測定データを出力するレーザ変位計2と、ワーク支持部1をX方向に直線移動させるX方向移動部4と、ワーク支持部1をY方向に直線移動させるY方向移動部5と、ワークをθ方向に回転移動させるθ方向移動部6と、を備える形状測定装置の組み付け誤差を補正する場合に、X方向およびY方向の組み付け誤差を補正するための円弧状の外周縁と、θ方向の組み付け誤差を補正するための直線状の外周縁を有する補正用治具を用いる。
(もっと読む)
画像処理装置、画像処理方法、およびプログラム
【課題】計測精度を向上させることができる画像処理装置、画像処理方法、およびプログラムを提供する。
【解決手段】モニタ22は、計測対象物の画像と、計測対象物に対応する物体であって予め算出された3次元形状を有する物体の画像とを表示する。CPU34cは、計測対象物を撮像したカメラの姿勢と、物体を撮像した仮想的なカメラの姿勢とが近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。また、CPU34cは、これら2種類のカメラの光学系または撮像素子の特性が互いに近づくように、計測対象物の画像と物体の画像との少なくとも一方の姿勢を調整する。CPU34cは、これらの調整を行った後、リモコン23を介して入力される指示に基づいて指定された計測位置に対応する物体上の空間座標を算出し、算出した空間座標に基づいて、物体のサイズを算出する。
(もっと読む)
キャリブレーション方法および基板検査装置
【課題】撮像装置とキャリブレーションマークとの位置関係に係わらず、撮像装置をキャリブレーションするに十分な、キャリブレーションマークの撮像画像を取得する。
【解決手段】単一のキャリブレーションマークを複数回撮像することによって、複数の基準マークが配置されたキャリブレーションを撮像したときと同様の画像マークを取得し、この画像マークに基づいて撮像装置について中心位置、取り付け角度、分解能等のキャリブレーションを行う。単一のキャリブレーションマークを異なる撮像位置で複数回撮像して画像マークを取得する撮像工程と、複数回の撮像で取得したキャリブレーションマークの各画像マークを用いて、複数個の画像マークを有した撮像画像を形成する撮像画像形成工程と、撮像画像の画像マークの位置と撮像画像上の基準位置とに基づいて、撮像装置のキャリブレーション情報を算出するキャリブレーション情報算出工程とを備える。
(もっと読む)
撮像素子の異物検出方法及びその装置
【課題】撮像素子の受光面とその前方に配置されたカバーガラス等の透明体の前面及び背面のうちのいずれかの表面に存在する異物の位置、大きさ、形状を特定することができる撮像素子の異物検出方法及びその装置を提供する
【解決手段】本発明に係る異物検出装置は、撮像素子パッケージ2を装着部50に装着し、光源部60から照明光を照射して、撮像素子10の受光面の像を撮像する。光源部60から受光面10Aに照射する照明光は、例えば、平行光と、点光源からの拡散光とで切り替えられ、各々の照明光により照明している状態で撮像した撮影画像を制御・検査部80に取り込み、それらの画像を比較することによって、異物の3次元的な位置、大きさ、形状を特定する。
(もっと読む)
熱源位置角度検出方法
【課題】熱源の大きさが赤外線カメラ1画素の検出範囲よりはるかに小さな場合であっても、赤外線カメラの画素数を増やすことなくカメラから熱源までの位置角度を精度良く求める。
【解決手段】検出範囲の最も赤外線カメラから遠くにあり、1画素の検出範囲よりもはるかに小さな熱源であっても、赤外線カメラのレンズの焦点をずらし、3画素に赤外線が入射させ3画素が出力するデータの大小を比較することにより精度の高い熱源の角度検出を行う。
(もっと読む)
画像測定装置
【課題】簡単な構造で容易に対象エリア、又は測定対象の画像が取得できると共に対象エリアの測定が行える画像測定装置を提供する。
【解決手段】投光光軸26と照明光29を射出する光源27とを有し、前記投光光軸を経て前記照明光を投射する投光光学系5と、受光光軸15と撮像素子13とを有し、測定対象からの再帰反射光29′を前記受光光軸を経て撮像素子で受光する受光光学系6と、前記撮像素子で撮像されたデータを処理する制御演算装置7とを具備し、前記投光光学系は前記投光光軸を測定対象に向け前記照明光を投射する投光ユニット25と、該投光ユニットを高低方向、水平方向に回転し、前記照明光の投射角を変更する投射角変更手段23,33と、前記受光光軸に対する前記投光光軸の方向角を検出する方向検出手段24とを有する。
(もっと読む)
管端検査装置
【課題】管端部の加工部について、寸法精度と加工面の状態とを共に自動的に検査することができ、しかもインライン化が可能なよう検査装置全体のコンパクト化を可能にした、管端検査装置を提供する。
【解決手段】端部を加工した管2の管端加工部を検査する管端検査装置である。管端加工部の形状を計測するレーザ変位計42と、管端加工部の表面を撮影する撮像装置62と、レーザ変位計42及び撮像装置62を管端加工部の周方向に沿って移動させることにより、レーザ変位計42のレーザビームスポット及び撮像装置62の焦点を管端加工部の周方向に沿って周回させる回転テーブル(周回手段)と、を備える。
(もっと読む)
移動環境認識装置及び方法
【課題】高精度に測定対象の形状認識情報を得る。
【解決手段】測定対象までの距離画像データを得る距離画像測定工程ステップST1と、この距離画像測定工程で得た距離画像データに基づき、所定のデータの集合体からなるラベリング領域を作成するラベリング処理工程ステップST2〜ステップST7と、このラベリング処理工程で作成した複数のラベリング領域に基づいて複数の上面データを形成する上面データ形成工程ステップST8と、この上面データ形成工程で形成した複数の上面データに基づいて測定対象の形状を認識する形状認識工程ステップST9〜ステップST13と、を備えた移動環境認識方法である。
(もっと読む)
三次元測定対象物の形態調査方法
【課題】レーザー走査装置により三次元測定対象物の形態を正しく測量し、調査する。
【解決手段】三次元測定対象物の形態調査方法であって、レーザー走査装置が調査範囲にレーザーを照射したとき、該レーザーの多数の反射点の各点を、三次元座標化された点として取得し、前記調査範囲の水平面上に多数のグリッドを派生させ、各グリッドの中にある点群の鉛直座標分布から標高値の最も低い低位点を抽出し、各グリッドで抽出された低位点を用いて調査範囲の地形モデルを作成する。
(もっと読む)
画像処理装置および画像処理プログラム
【課題】所望の計測部分の幾何的な物理量を選択的にかつ容易に取得することが可能な画像処理装置および画像処理プログラムを提供する。
【解決手段】対象物画像データに基づいて対象物画像OIが表示されるとともに、指定画像データに基づいて対象物画像の特定部分に対応する計測部分指定画像AIが表示される。使用者による操作部の操作により、表示される計測部分指定画像AIが対象物画像OIに相対的に移動される。計測部分指定画像AIが対象物画像OIの特定部分に移動された場合、その特定部分に対応するように予め設定された計測対象物の計測部分の物理量が計測される。
(もっと読む)
回転式レーザー測定装置
【課題】コンクリート壁等測定対象面の状態(凹凸量)を装置により自動的に、かつ精度良く測定できるようにする。
【解決手段】回転式レーザー測定装置は、レーザー光によって距離を測定する距離センサと、該距離センサを軸方向に駆動する第1の駆動手段と、同距離センサを軸周り方向に駆動する第2の駆動手段と、これら第1,第2の駆動手段を駆動制御する駆動制御手段とを備え、上記距離センサを測定対象面の長手方向と直交する面に沿って回転可能に支持するとともに、上記測定対象面の長手方向に沿って所定ピッチ毎に移動可能とし、該所定ピッチ毎に上記距離センサを移動させ、かつ所定の角度回転させながら、測定対象面の状態を自動的に測定して行くようにした。このような構成によると、自動的かつ容易に、しかも正確に凹凸その他の表面状態を測定して行くことができるようになる。
(もっと読む)
画像取得装置および画像取得方法
【課題】受光部のフォーカス調整を容易に行う。
【解決手段】画像取得装置は、ガラス基板9上における線状の撮像領域を撮像する撮像ユニット2と、ガラス基板9を撮像領域と交差する方向に移動する移動機構とを備える。撮像ユニット2は、光照射部21および受光部23を有し、光照射部21により撮像領域に光が照射され、撮像領域からの光が受光部23のラインセンサへと導かれる。画像取得装置では、受光部回動機構が受光部23を回転することにより受光部23の光軸J2とガラス基板9の法線Nとのなす検出角θ2が変更される。撮像ユニット2は、光軸J2に沿って受光部23を移動する受光部移動機構をさらに備え、検出角θ2の変位量に基づいて受光部移動機構を制御することにより、光軸J2上においてラインセンサの受光面と共役な位置Pがガラス基板9の表面に配置される。これにより、受光部23のフォーカス調整が容易に行われる。
(もっと読む)
指示位置表示装置および指示位置表示システム
【課題】レーザー光の照射位置の制御や照射位置の制御にかかる装置レイアウトの自由度を向上する。
【解決手段】カメラ10と、レーザーポインタ20が照射するレーザー光の照射位置を含む範囲をカメラ40が撮像するようにレーザーポインタ20とカメラ40とを載置され、レーザーポインタ20とカメラ40とを一緒に回動させるポインタマニピュレータ30と、ポインタマニピュレータの回動を制御する制御装置50と、を備え、制御装置50は、カメラ40が撮像する画像P2とカメラ10が撮像する画像P1とを取得し、画像P2内における画像P1の位置を特徴点マッチングにより特定し、画像P1と画像P2と前記位置とに基づいて、ポインタマニピュレータ30の回動を制御する。
(もっと読む)
三次元計測システム及び三次元計測方法
【課題】ロボットの座標系に依存しない、三次元計測システムを提供する。
【解決手段】計測対象の三次元形状を計測する三次元計測器20と、この三次元計測器20を移動させるロボット10と、ロボット10を駆動制御するロボット制御装置30と、を備えた三次元計測システム1であって、ロボットのアーム先端に固定され三次元計測器を支持したベースプレート60と、ベースプレートに固定された三次元計測器20の傾きを計測するロボット計測装置40と、ワーク計測箇所の座標及びワークの形状寸法を算出するデータ処理装置50と、を備えている。
(もっと読む)
測定装置
【課題】内径の異なる種々の穴形状を精度良く測定できる測定装置を提供すること。
【解決手段】被測定領域の少なくとも一部の面の法線方向とは異なる方向から前記被測定領域に照明光を照射することで被測定領域に帯状の照明領域を形成する照明系と、前記照明系による照射方向と前記帯状の照明領域における長手方向等を含む面からはずれた位置から照明領域の散乱光を受光する受光系と、受光系の受光結果に基づいて被検面の形状を算出する演算部と、を備える。
(もっと読む)
表示装置、電子機器、およびプログラム
【課題】互いに異なる複数の面に表示部を有する場合であっても、それぞれの表示部の表示面に対面する複数の方向に位置する操作者に応じて適切な制御をすることができる表示装置を提供する。
【解決手段】表示装置は、互いに表裏の位置関係に表示面が配置されている第1表示部および第2表示部と、第1表示部または第2表示部の表示面に対する操作者の相対位置を検出し、検出した相対位置に基づいて、第1表示部および第2表示部のうち、操作者に対面する表示部の表示面が表面であると検出するとともに、他方の表示部の表示面が裏面であると検出する検出部と、検出部により検出された結果に基づいて、表面の表示部または裏面の表示部の表示を制御する制御部と、を備える。
(もっと読む)
レーザ計測用ターゲット治具及びレーザ計測システム
【課題】計測システム全体の小型化及び軽量化を図るとともに、配管の取付位置を正確に特定することができる、レーザ計測用ターゲット治具及びレーザ計測システムを提供する。
【解決手段】第一フランジ11に一端部2a及び中間部2bが固定される計測器用固定治具2と、第二フランジ12に固定されるレーザ計測用ターゲット治具3と、計測器用固定治具2の他端部2cに固定されるレーザ計測器4と、第一フランジ11及び第二フランジ12の位置を算出する演算手段5と、を備え、レーザ計測用ターゲット治具3は、第二フランジ12に配置される台座31と、レーザ光を反射可能な表面32aを有し台座31に表面の一部が突出するように固定された球体32と、台座31を第二フランジ12に固定する固定手段33と、を有する。
(もっと読む)
1 - 20 / 348
[ Back to top ]