
Fターム[2F065QQ00]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761)
Fターム[2F065QQ00]の下位に属するFターム
サンプリング (206)
ピークホールド (43)
A/D変換、多値化 (3,603)
信号の遅延 (75)
信号の微分、差分 (1,068)
信号の積分 (316)
フーリエ変換;逆フーリエ変換 (544)
近似式(例;多項式近似) (1,899)
形状特定のためのパラメータ抽出 (463)
信号の記憶 (4,476)
信号の比較、減算 (4,276)
信号の加算 (639)
信号の特定位置の検出 (2,005)
画像処理(1次元を含む) (5,599)
統計処理 (2,372)
ゲート手段の利用 (33)
カウンター (263)
Fターム[2F065QQ00]に分類される特許
201 - 220 / 881
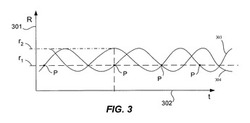
連続多波長表面スキャンを用いて表面レイヤ厚さを決定する方法および装置
【課題】複数の画像データから高精細な画像を表す高精細画像データを生成する高精細画像生成処理において、生成する高精細画像の出力時における画質の低下が抑制されるような画像データを生成することを可能とする。
【解決手段】画像生成装置は、生成する高精細画像データの出力に用いる出力装置に関する情報を出力装置情報として取得し、出力装置情報に基づいて出力装置での出力に適した高精細画像の画像サイズを生成画像サイズとして設定する生成画像サイズ設定部を備える。また画像生成装置は、複数の画像データから、時系列に並んだ複数の画像データを合成元画像データとして取得し、取得した合成元画像データを合成して、設定した生成画像サイズの高精細画像を表す高精細画像データを生成する画像合成部を備える。
(もっと読む)
変位分布計測方法、装置及びプログラム

【課題】計測物体の変位分布を高速に計測するとともに小型化が可能な変位分布計測方法、装置及びプログラムを提供する。
【解決手段】本発明による変位分布計測装置(1)は、所定の波長の光を照射するレーザ光源(11)と、照射された光を物体光と参照光とに分離するビームスプリッタ(14)と、参照光の位相を所定量だけシフトさせるミラー付きPZTステージ(20)と、位相シフトされた参照光を複数に分岐するペリクルビームスプリッタ(17,18)と、計測物体(23)により散乱された物体光と、分岐された参照光との干渉縞を撮影するCCDセンサ(15,16)とを備えることを特徴とする。
(もっと読む)
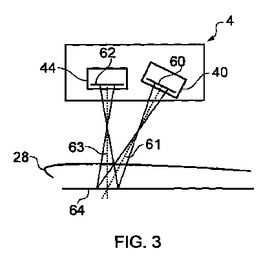
非接触物体検査
物体のエリアのトポグラフィを、物体上に投影されたパターンの位相の解析を介して検査する非接触方法である。その方法は、第1のパースペクティブから獲得された、光学的パターンが投影される物体の第1の画像を取得するステップと、第2のパースペクティブから獲得された、光学的パターンが投影される物体の第2の画像を取得するステップであって、第2の画像内の物体上に当たるときの光学的パターンは、第1の画像内の光学的パターンとは異なる、ステップとを含む。その方法は、第1の画像内に映し出された光学的パターンの少なくとも1つの領域の位相に関する位相データに基づいて、物体の少なくとも1つの領域のトポグラフィを記述するデータを決定するステップをさらに含む。第2の画像内に映し出された物体の対応する領域から獲得した位相データは、第1の画像から獲得した位相データまたはトポグラフィデータのあらゆる曖昧性を解決するために使用される。
 (もっと読む)
(もっと読む)
車両検査装置
【課題】本発明の第一の目的は、車輪側面のきず等の特徴量を検出するに当たり、その存在する位置を絶対位置との関係で特定するための基準マーク検出手法を備えた車両検査装置を提供することにある。
【解決手段】入力した鉄道車両車輪側面の画像から車輪上の特徴量を検出し、入力した鉄道車両車輪側面の画像から車輪中心の座標を検出し、入力した鉄道車両車輪側面の画像から基準マークを検出してその座標を決定し、車輪中心の座標と基準マークの座標を基準として決定された特徴量の位置を記憶する。
【効果】特徴量の位置を特定するための絶対位置である基準マークを検出することができるので自動的な車両検査を可能とする。
(もっと読む)
3次元形状測定方法
【課題】簡単に合成できると共に測定できない箇所が生じない3次元形状測定方法を得る。
【解決手段】定盤10の平坦な定盤面12に多数のマーク14を形成すると共に、多数のマーク14から大きさと間隔との違いにより少なくとも3つのマーク14を特定可能に形成する。また、各マーク14の大きさと間隔とを記憶する。そして、定盤面12に定盤面12より小さな被測定物1を載置して、被測定物1の部分領域を形状測定器2により少なくとも3つのマーク14と共に光学的に3次元測定して測定値を得る。その後、形状測定器2を移動して、少なくとも3つのマーク14と共に被測定物1の他の測定箇所の部分領域を光学的に3次元測定して測定値を得て、記憶したマーク14の大きさ及び間隔と測定したマーク14の大きさ及び間隔とに基づいて、両測定値を同一座標系に変換して合成する(ステップ100〜200)。
(もっと読む)
カメラパラメータのキャリブレーション装置及びプログラム
【課題】直感的なキャリブレーション処理を可能とする、カメラパラメータのキャリブレーション装置を提供する。
【解決手段】キャリブレーション装置は、各撮影画像内の同じ被写体の同じ点である対応点それぞれについて、撮影画像内での位置を示す画像座標系での第1の座標を保存する手段と、各カメラのカメラパラメータから世界座標系と画像座標系とを変換する射影行列をそれぞれ計算する手段と、各カメラそれぞれについて、カメラの射影行列及び該カメラの撮影画像内の第1の座標に基づき実空間内の直線を求める手段と、各カメラの射影行列及び各撮影画像の第1の座標に基づき実空間上の1点の世界座標を求め、求めた世界座標と座標変換手段が求めた各直線との距離に基づき誤差量を算出する手段と、算出した誤差量を表示する手段と、保存している各カメラのカメラパラメータを変更する手段とを備えている。
(もっと読む)
三次元形状データ処理装置、三次元形状データ処理システムおよび三次元形状測定システム
【課題】対象物についての形状データの配置合わせの可否を判定する手法を改善する。
【解決手段】対象物上で互いに重なる部分を有する第1領域と第2領域のそれぞれの三次元形状を表現した第1形状データと第2形状データとを取得し、第2形状データに基づいて、互いに異なる複数の幾何学的状態を表現した複数の第3形状データを生成して、生成された第3形状データのそれぞれを第1形状データへ配置合わせすることにより複数の第4形状データを生成する。そして、第1領域と第2領域とを包含する範囲について所定の許容範囲内の精度で対象物の三次元形状を再現できるか否かを、複数の第4形状データについての形状配置の相互関係に基づいて判定する。
(もっと読む)
赤外線LEDおよび単点光センサを使用したカーソル相対位置検出方法および装置
【課題】ガンコントローラに撮像装置を内蔵させることなく、ホトダイオードなどの受光素子を設けることにより、ガンコントローラなどで照準を合わせたLCD画面上の座標(カーソル)位置を検出するカーソル相対位置検出方法およびその装置を提供する。
【解決手段】LCD画面の4隅にそれぞれ発光周波数の異なる赤外線LED(A)1,(B)2,(C)3および(D)4が配置されている。LCD画面から所定の距離のホトダイオード5で同時に発光した赤外線LEDの合成出力を得る。この合成出力をフーリエ変換して各赤外線LED毎に出力を得、FPGAの論理機能を用いてLCD画面の座標位置(カーソル位置)を算出する。
(もっと読む)
ロボットの制御装置及びロボットのティーチング方法
【課題】ロボットをティーチングする際に並行して撮像対象物までの距離計測を行うロボットの制御装置を提供する。
【解決手段】初期位置で撮像される画像フレームの中心周りで注視領域を設定し、初期位置の座標を移動元座標とする。入力された移動方向に対し、注視領域が撮像フレームに収まるようカメラを上記移動方向にTB(ベクトル)だけ微小移動させ、移動元座標,移動先座標(移動後の座標)からカメラの移動距離TC(ベクトル)を計算し、移動先座標,移動元座標で夫々捉えた画像から注視領域の移動距離を求めてカメラ間視差とし、カメラの焦点距離,移動距離,視差から三角測量法で移動元座標から注視点Pcまでの撮像距離を求め、入力された移動方向と撮像距離とから移動先座標を始点,撮像距離を半径としてカメラが注視点方向を常に向いた状態での目標円弧軌道を計算し、カメラを前記軌道に沿って移動させるようロボットに指令を出力する。
(もっと読む)
エンジンマウントの変位量計測方法
【課題】高速な振動現象の下にあっても、エンジンマウントのマウント軸として配設されるボルトの中心の3軸並進量、及び、該ボルトの2軸回転量を高精度に算出することができる、エンジンマウントの変位量計測方法を提供する。
【解決手段】本発明に係るエンジンマウントの変位量計測方法は、球体変位計側工程の前に、照射方向と直交する平面上における初期座標が既知である球体13を、照射方向と直交する方向へ、初期座標の位置から既知の移動量dx(dy)だけ移動させ、第1レーザー変位計31a〜第3レーザー変位計31cによる計測点におけるそれぞれの照射方向変位量δS1x〜δS3x(δS1y〜δS3y)を計測し、照射方向変位量δS1x〜δS3x(δS1y〜δS3y)の計測結果から、第1レーザー変位計31a〜第3レーザー変位計31cの位置を算出する、位置算出工程を備える。
(もっと読む)
欠陥検査方法及び欠陥検査装置
【課題】被検体を撮影する際に自動的に焦点を合せ、得られた画像から欠陥の有無を判断する欠陥検査方法及び欠陥検査装置を提供する。
【解決手段】撮影して得られた画像から欠陥の有無を判断する欠陥検査方法において、撮像手段2の焦点を合せる自動焦点調節ステップと、被検体における欠陥の有無を判断する画像解析ステップとを具備し、自動焦点調節ステップは、被検体と撮像手段2との距離又は撮像手段2の焦点距離を複数回変更して撮影し、得られた各画像から被検体の輪郭を抽出処理し、各輪郭抽出画像に対して離散フーリエ変換処理を用いることで周波数領域に変換し、周波数領域における輝度値の総和を算出し、輝度値の総和が最大となる被検体と撮像手段2との距離又は撮像手段2の焦点距離を特定し、特定された被検体と撮像手段2との距離又は撮像手段2の焦点距離に調節する、とした。
(もっと読む)
ボイラ火炉蒸発管の検査装置および検査方法
【課題】蒸発管が肉盛溶接された場合であっても、蒸発管の減肉量を正確に算出することができるボイラ火炉蒸発管の検査装置および検査方法を提供する。
【解決手段】蒸発管4に固定される支持部14と、支持部14に支持される変位センサ12と、変位センサ12からの信号を処理する信号処理装置16とを備える検査装置11を用いて、蒸発管4の基準位置を示す基準マークを含む蒸発管4の表面形状を計測する。計測された蒸発管4の表面形状を、信号処理装置16によって、記憶手段に予め記憶された減肉がない状態における、前記基準マークを含む蒸発管4の基準表面形状に重ね合わせて、両者の差分から蒸発管4の減肉量を算出する。このとき、基準マークに基づいて、蒸発管4の軸方向の同一位置における表面形状と基準表面形状とを重ね合わせる。
(もっと読む)
3次元計測装置
【課題】装置構成の簡略化と低コスト化とを実現する。
【解決手段】3次元計測装置10は、被測定物105が載置された測定ステージ104と、複数の基準点を有する基準スケール部材101と、撮像部102と、駆動機構103と、高輝度検出部110と、3次元測定部111とを有する。撮像部102は、被測定物105の光学像と基準スケール部材101の複数の基準点の光学像とを同一視野で撮像する。高輝度検出部110は、駆動機構103が撮像部102を相対移動させる駆動期間内に撮像部102によって連続的に撮像された複数の画像から、撮像部102のN個の相対移動位置の各々に対して被測定物105の最大輝度部分を検出するとともに複数の基準点のうち最大輝度を示す基準点を検出する。3次元測定部111は、相対移動位置ごとに、前記最大輝度部分の高さを当該検出された基準点に対応付けられた高さに設定する。
(もっと読む)
突出形状測定装置および突出形状測定方法およびプログラム
【課題】測定対象の突部の突出形状を容易かつ精度良く測定する。
【解決手段】ロータリーダイカッター10のダイカットロール20の刃型22の突出形状を測定する突出形状測定装置1は、ロータリーダイカッター10が載置された走査ステージ16をダイカットロール20の回転軸線Nの軸線方向に移動させる駆動装置14と、走査時に変位計11から逐次出力される変位出力Yおよび受光量LIの走査位置xに応じた変化を検出する変位出力取得部52および受光量取得部53と、受光量LIが最大の走査位置xでの変位出力Yにより刃型22の刃先突出高さを検出する突出高さ算出部54と、走査位置xに応じた受光量LIの変化に係る状態量の検出値と、刃型22の刃先幅および状態量をパラメータとして作成したモデルデータとを比較し、状態量の検出値に対応するモデルデータから刃先幅を検出する突出幅算出部55とを備える。
(もっと読む)
変位検出装置
【課題】簡易な構成で、ノイズレベルが低く、かつ感度が高い変位検出装置を提供する。
【解決手段】変位(振動)可能に支持された金属層14と、光学ガラス23の表面に設けられた金属層24とが所定のギャップgを介して互いに対向配置されている。発光素子30が所定の位置に固定されており、金属層24の裏面に対して、所定の波長の光を所定の角度θで射出するようになっている。受光素子40は、発光素子30から射出された光のうち反射光を検出するようになっている。
(もっと読む)
環境認識システム、環境認識方法およびロボット
【課題】ロボット等の装置の周辺に存在する物体の位置、姿勢および形状等、当該物体を対象とする当該装置の動作のために必要な情報を高精度で認識することができるシステム等を提供する。
【解決手段】本発明の環境認識システムによれば、3次元画像センサ11および2次元画像センサ12のそれぞれのカメラパラメータを用いて、被写体の3次元情報および物理情報(色情報など)が対応付けられる。その結果、ロボットRの周囲にある被写体に関する位置、姿勢および形状、ならびに、被写体の物理情報が取得される。
(もっと読む)
ロボットシステムおよびロボットシステムの制御方法
【課題】ワークが撮像されたボケ画像からワークの位置を精度良く検出するロボットシステムを提供する。
【解決手段】ワークWに対して作業を実施するロボット10と、前記ワークWを載置するとともに、蛍光体マーカー74を備えたステージ72と、前記ワークWと前記蛍光体マーカー74とを所定の露光時間で撮像するカメラ20と、前記カメラ20の露光時間より短い周期で前記蛍光体マーカー74を点滅発光させるマーカー制御部45と、を備え、前記カメラ20により撮像されたボケ画像から前記蛍光体マーカー74の軌跡画像100を抽出して、前記軌跡画像100から点拡散関数を算出する点拡散関数算出部35と、算出した前記点拡散関数を用いて、前記ボケ画像を画像変換し前記ボケ画像からボケていない元画像を生成する画像生成部37と、前記元画像から前記ワークWの位置を算出する位置算出部39と、を有するロボットシステム5。
(もっと読む)
パターン形状計測方法、半導体装置の製造方法、およびプロセス制御システム
【課題】半導体デバイスの微細化に対して、プロセスマージンが狭小な場合でも半導体パターンの形状計測を高精度で行うことができるパターン形状計測方法を提供する。
【解決手段】パターン形状計測方法において、ベストマッチとなる計算波形が選出不可能な場合は、形状パラメータの内、少なくとも1つのパラメータを、パターン形状計測に依らない計測方法を用いる他計測装置にて得られた情報に基づいて固定値とし、再度、ライブラリと検出波形のマッチングを行い、ベストマッチとなる計算波形を選出するステップと、ベストマッチした計算波形より対象パターンの形状情報を求める。
(もっと読む)
干渉計及び面形状測定方法
【課題】被検面が非球面であってもその面形状を高精度に測定する。
【解決手段】測定光発生用の光ファイバー18Mから射出して被検面2Sを介した測定光LMと参照光とを干渉させて得られる干渉縞35に基づいて被検面2Sの面形状を測定する干渉計10において、複数の位置QA〜QCで参照光LA〜LCを射出する参照光発生用の光ファイバー18A〜18Cと、参照光LA〜LCの発生を切り替えるシャッター24A〜24Cと、参照光毎に得られる干渉縞から求められる面形状を合成する信号処理装置32とを備える。
(もっと読む)
機上測定方法及び測定装置
【課題】ワークの加工面形状を工作機械上で高精度に測定し得る装置等を提供する。
【解決手段】基準ミラー21をテーブル2上に配設し、ワークWの加工面を測定する第1のレーザ変位計L1と基準ミラー21の基準面を測定する第2のレーザ変位計L2とを工具保持台3に配設する。測定運動付与部24によってテーブル2と工具保持台3とを正弦波軌跡で相対移動させ、この状態で測定される加工面変位データと基準面変位データとを基に、感度算出部28によって第1のレーザ変位計L1の感度を算出する。ついで、実形状データ算出部29により、算出された感度を基に、加工面変位データを補正し、補正後の加工面変位データと基準面変位データとの差分をとって、加工面の実形状データを算出する。
(もっと読む)
201 - 220 / 881
[ Back to top ]