
Fターム[2F065QQ00]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761)
Fターム[2F065QQ00]の下位に属するFターム
サンプリング (206)
ピークホールド (43)
A/D変換、多値化 (3,603)
信号の遅延 (75)
信号の微分、差分 (1,068)
信号の積分 (316)
フーリエ変換;逆フーリエ変換 (544)
近似式(例;多項式近似) (1,899)
形状特定のためのパラメータ抽出 (463)
信号の記憶 (4,476)
信号の比較、減算 (4,276)
信号の加算 (639)
信号の特定位置の検出 (2,005)
画像処理(1次元を含む) (5,599)
統計処理 (2,372)
ゲート手段の利用 (33)
カウンター (263)
Fターム[2F065QQ00]に分類される特許
61 - 80 / 881
測定装置、測定方法、およびプログラム
【課題】対象物に接触または近接させた複数の測定用端子の位置を撮影画像に基づいて取得する技術において、一部の測定用端子の位置を取得できなかった場合に、再度の撮影を行うことなくその位置を取得する。
【解決手段】プローブソケット11,12は、被験者の頭部25に複数が装着される。プローブソケットを被験者に装着した状態を複数の方向から撮影し、その撮影画像からプローブソケットの位置を検出する。この際、ある特定の撮影画像からの検出が上手くゆかず、一部のプローブソケット位置が特定できない場合、他の撮影画像の中に写っている当該プローブソケットの撮影画像を利用して再検出を行う。これにより、検出ミスがあっても再度の撮影を行わずに済む。
(もっと読む)
基板検査装置

【課題】位相シフト法を利用した三次元計測を行うにあたり、計測精度の向上を図ることのできる基板検査装置を提供する。
【解決手段】基板検査装置8は、プリント基板に対し光を照射する照明装置10と、当該プリント基板を撮像するCCDカメラ11と、制御装置12とを備えている。制御装置12は、CCDカメラ11により撮像された元画像データを記憶する元画像データ記憶手段24と、元画像データからRGB各色成分を抜き出す抜き出し画像データ作成手段25と、抜き出し画像データのデータ欠落部分を補完する補完画像データ作成手段26と、当該補完画像データを基にカラー輝度画像を作成するカラー画像作成手段27と、当該カラー輝度画像を基に計測対象領域を抽出する二次元計測手段28と、当該計測対象の三次元計測を行う三次元計測手段29と、当該計測結果を基にハンダの印刷状態を検査する判定手段30とを備えている。
(もっと読む)
画像処理方法、プログラム、および画像処理装置
【課題】計測時の手間を低減する。
【解決手段】CPU34cは、ブレードを撮像した動画像を構成する第1のブレード画像からテンプレート画像を抽出する。CPU34cは、第1のブレード画像とテンプレート画像とを比較し、第1のブレード画像の中から、テンプレート画像におけるブレードの姿勢と一致する姿勢のブレードを含む第2のブレード画像を抽出する。CPU34cは、予め算出された3次元形状を有する物体の画像をテンプレート画像に重畳した第1の画像を表示部に表示し、テンプレート画像におけるブレードの姿勢に一致するように、第1の画像における物体の姿勢を制御する。CPU34cは、この物体の画像を第2のブレード画像に重畳した第2の画像を表示部に表示する。CPU34cは、第2の画像における物体上の計測点の3次元座標を算出し、算出した3次元座標に基づいて、物体のサイズを算出する。
(もっと読む)
情報処理方法及び情報処理装置
【課題】 複数の撮像装置をそれぞれ処理装置に接続した状態で、第1の撮像装置の位置姿勢情報計測値を第2の撮像装置の位置姿勢に変換するための較正情報をより簡便に取得することを目的とする。
【解決手段】 マスタ演算処理装置300は、ビデオカメラ120が撮影したランドマークを含む撮影画像を入力し、ビデオカメラ120の位置姿勢を算出し、スレーブ演算処理装置1300に送信する。スレーブ演算処理装置1300は、ビデオカメラ1120で撮像された画像上のランドマークの識別番号及び画像座標を取得し、(画像座標−世界座標−マスタ撮像装置位置姿勢)の組としてデータリストを生成する。生成したデータリストより較正情報算出部1340は、画像座標の理論値と実際の観測値との誤差が最小となるようにビデオカメラ120からビデオカメラ1120への位置姿勢の較正情報を算出する。
(もっと読む)
マーカ
【課題】本発明の課題は、マーカとマーカの観測物が正対する付近でも、マーカを観測物により正確に計測することができるマーカを提供することである。
【解決手段】上記の課題を解決するために、本発明に係るマーカは、模様と、模様の上に付けられたレンズであって、レンズを観測する方向に応じてレンズ上に観測される濃淡パターンが変化するレンズとを含むマーカユニットを備えることを特徴とする。
(もっと読む)
三次元形状測定装置
【課題】多乱光の影響による三次元形状の測定の誤差を抑制する。
【解決手段】三次元形状測定装置は、投影部と、調整部と、検出部と、制御部とを備える。投影部は、測定対象物に対してパターン光を照射する。調整部は、パターン光の照射強度を調整する。検出部は、パターン光の照射された前記測定対象物の表面の明るさを検出する。制御部は、パターン光を照射しない非照射状態で検出される測定対象物の表面の明るさに基づいて調整部による照射強度の調整を制御する。
(もっと読む)
乗員検知装置
【課題】大人と子供とを精度良く判別する。
【解決手段】乗員検知装置10は、単眼距離画像センサ11から出力される距離画像に基づき、乗員領域の体積を推定し、該体積が所定体積閾値以上であるか否かを判定する体積判定部56と、車両上下方向の所定位置よりも下方側に車室内の乗員の膝部が存在するか否かを判定する膝部判定部57と、体積判定部56により乗員領域の体積が所定体積閾値以上であると判定された場合であって、膝部判定部57により所定位置よりも下方側に膝部が存在すると判定された場合には乗員は大人であると判定し、膝部判定部57により車両上下方向の所定位置よりも下方側に膝部が存在しないと判定された場合には乗員は子供であると判定する乗員判定部58とを備える。
(もっと読む)
光学マルチ波長インターフェロメトリーを使用した薄膜素子測定方法
【課題】光学マルチ波長インターフェロメトリーを使用した薄膜素子測定方法の提供。
【解決手段】光学マルチ波長インターフェロメトリー使用の薄膜素子測定方法が開示される。本発明は異なる波長での薄膜の反射係数を使用して薄膜の厚さと光学定数を測定する。試験表面と参考表面の間の反射位相差由来の位相差は異なる波長での測定を行うことで参考光束と試験光束の間の空間経路差に由来する位相差と区別され、なぜならそれらは測定波長変化に伴い異なった変化を示すためである。反射位相がそれから得られる。薄膜の測定反射率と結合され、薄膜の反射係数が得られる。各点の反射係数が収集され、該薄膜の厚さと2次元の光学定数分布が計算される。表面輪郭が、参考光束と私見光束の間の空間経路差を通して知られる。これらは動的干渉計で測定されて振動影響が回避される。
(もっと読む)
立体形状認識装置
【課題】認識精度を高く維持しつつ処理を軽くする。
【解決手段】複数方向から照明光を照射する照明手段2と、対象物を撮像する撮像手段1と、これらの制御部120とを備え、照度差ステレオ法を用いて、複数の撮像画像データとそれぞれの照射方向とから撮像画像を構成する画素ごとに法線ベクトルを算出する立体形状認識装置10において、撮像画像を構成するそれぞれの画素について、複数の撮像画像データの同じ位置の画素における複数の輝度値を、予め定めた絞り込み条件に従って絞り込む選出部21と、撮像画像を構成するそれぞれの画素について、選出部により絞り込まれた同じ位置の画素における複数の輝度値に基づいて法線ベクトルを算出する算出部22とを備ている。
(もっと読む)
位置特定装置、位置特定方法、及びプログラム
【課題】基準位置からのベースライン長を十分に確保できない位置での撮像画像を用いて行うステレオ視による対象物の位置特定の精度を向上させる。
【解決手段】撮像位置特定部1は、位置情報が既知である基準位置の当該位置情報と、当該基準位置で対象物を撮像して得た基準位置画像と、任意の撮像位置で当該対象物を撮像して得た撮像位置画像とに基づいて、当該撮像位置の位置情報の特定を行う。対象物位置特定部2は、既知位置の位置情報と、当該既知位置で当該対象物を撮像して得た既知位置画像と、当該撮像位置の位置情報と、当該撮像位置で該対象物を撮像して得た撮像位置画像とに基づいて、当該対象物の位置情報の特定を行う。なお、既知位置とは、撮像位置特定部1で位置情報が特定された撮像位置からの距離が前述の基準位置よりも大きい地点に位置しており、且つ、位置情報が既知である位置のことである。
(もっと読む)
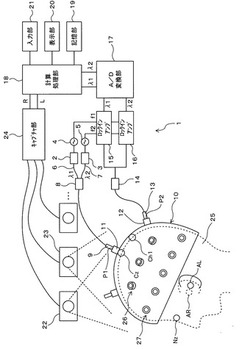
画像認識装置、装着型ロボット、及び画像認識プログラム
【課題】画像認識用のカメラの高さを自動的に検出する。
【解決手段】カメラ位置22には、前方斜め下に向けた画像認識装置用の撮像カメラ5が設置されており、その上方の光源位置21には、撮像カメラ5の画面フレーム31の内部に投影像26を投影する光源装置4が設置されている。装着型ロボットに搭載された画像認識装置は、画面フレーム31の下端と投影像26の下端との距離である投影像オフセットx2を画像データで計測し、投影像オフセットx2とカメラ高さy2を対応させた対応データマップや、あるいは計算によりカメラ高さy2を取得する。このようにして得られたカメラ高さy2は、パラメータとして記憶装置に記憶され、画像認識装置で段差などの認識するのに使用される。
(もっと読む)
通過者識別装置
【課題】規定の場所を通過する通過者の外観形状を計測することによって通過者の体型を類別し、結果的に住宅内などの少人数の範囲内で個人の特定を可能にする。
【解決手段】距離センサ20は、特定面を通過する通過者の外観形状を計測した距離データを出力する。距離データ処理部31は、距離センサ20から出力された距離データを用いて通過者の胴囲を推定する機能を備える。登録情報記憶部34は、識別対象の人物の外観形状を当該人物に対応付けて記憶している。識別部35は、距離データ処理部31で推定した胴囲、身長、肩幅を、登録情報記憶部34に照合し登録情報記憶部34に登録された人物のうち類似度が判定条件を満たす通過者を選択する。
(もっと読む)
検知装置、及び、検知方法
【課題】車両の側方に搭載されたカメラが撮影した車外画像のみに基づいてカメラの光軸の位置ズレを簡易に検知できる技術を提供する。
【解決手段】車両と相対的に移動する物体の像の車外画像中の移動軌跡と基準となるラインとを比較してカメラの光軸の位置ズレを検知するため、検知装置はカメラの光軸の位置ズレを車外画像のみで簡易に検知することができる。
(もっと読む)
画像生成装置、画像生成方法、およびプログラム
【課題】把持機構等の不要部分のない対象物のみの姿勢別画像を簡便な画像処理で得る。
【解決手段】対象物の画像を生成する画像生成装置であって、対象物を把持する把持部と、対象物と把持部との少なくとも1つの画像を撮像する撮像部と、把持部により把持された対象物が、撮像部に対して複数の所定姿勢のうちの1つの所定姿勢となるように把持部を制御する制御部と、撮像部により撮像された1つの所定姿勢にある対象物および対象物が1つの所定姿勢となるように制御された把持部の画像と、1つの所定姿勢とを関連付けて、把持状態画像として取得する第1の画像取得部と、対象物を把持しておらず且つ対象物が1つの所定姿勢となるように制御された姿勢と一致する所定姿勢である把持部の画像を非把持状態画像として取得する第2の画像取得部と、把持状態画像と、非把持状態画像との差分に基づいて、1つの所定姿勢について対象物のみの対象物画像を生成する画像生成部と、を備える。
(もっと読む)
材料流れの幅を測定する方法
【課題】放物線で送り出される材料流れの幅を測定する方法の提供。
【解決手段】第1の位置と第2の位置を通過するように移動しながら下方へ放物線で送出する材料流れの幅を測定する方法であって、所定の鉛直走査面に対して走査測定を行って複数の距離データを取得し、第2の位置で材料流れの光波測距手段に向かっている端縁における複数の点の座標データを第1の軌跡情報として取り出し、第2の位置で材料流れの光波測距手段に向かっている端縁における複数の点の座標データを第2の軌跡情報として取り出してから、第1の軌跡情報および第2の軌跡情報を用いて第1の軌跡情報に対応する第1の曲線および第2の軌跡情報に対応する第2の曲線を算出してから材料流れの幅を算出することを特徴とする、材料流れの幅を測定する方法。
(もっと読む)
三次元形状測定装置、三次元形状測定方法、構造物の製造方法および構造物製造システム
【課題】光源の光量に変化があった場合であっても、三次元形状を精度良く算出することができる。
【解決手段】三次元形状測定装置1は、メイン光源22が発光した光を縞パターンに変換して測定対象物11上に投影する投影部13と、測定対象物11を撮像する撮像部14と、投影部13が投影する縞パターンの位相を変化させながら、撮像部14に測定対象物11の撮像を繰り返しさせるとともに、縞パターンの画像を複数順に取得する制御部と、メイン光源22の光量の変化量を検出し、当該検出した変化量が所定の値以上である場合に、当該検出した変化量に基づいて前記縞パターンの画像を補正し、当該補正した縞パターンの画像に基づいて、測定対象物11の三次元形状を算出する形状算出部と、を備える。
(もっと読む)
対象領域抽出装置
【課題】 距離情報データに含まれるノイズを除去等する。
【解決手段】 対象領域抽出手段B10は、センサB02から得られる輝度情報データに基づいて、所定以上の輝度の存在する隣接画素数がしきい値以下の部分を削除するための輝度情報マスクを生成する。輝度情報マスクを距離情報データに重ね合わせ、輝度情報マスクに重複する領域の距離情報データだけを抽出する。
(もっと読む)
レーザ光の光軸方向の測定方法、長さ測定システム、および位置決め精度の検査方法
【課題】ターゲットの位置決め範囲が従来より狭く、かつ、測定光の光軸が固定されたレーザ干渉計であっても、測定光の光軸方向を測定可能な方法を提供すること。
【解決手段】レーザ干渉計104と再帰反射体106とハンドリング装置102を有する測定システム100を用いる。レーザ干渉計104は、測定光を再帰反射体106に照射し、その反射光と参照光との干渉光強度を検出する。ハンドリング装置102は、再帰反射体106を測定位置まで移動して位置座標情報を検出する。まず、レーザ干渉計104が干渉光を検出でき、かつ同一平面上に存在しない少なくとも4つの測定位置piを選ぶ。再帰反射体106を各測定位置piに移動させて、その位置座標情報を検出する。レーザ干渉計104が再帰反射体106までの距離の変化量を測定する。各測定位置の位置座標情報と各距離の変化量に基づき測定光のベクトル情報 a を算出する。
(もっと読む)
表面検査装置および表面検査方法
【課題】処理負荷、処理時間の増大を抑制し、境界部分の表面欠陥をも取りこぼすことのない検査を可能とすること。
【解決手段】検査対象を有する物体を相対移動させながら撮像した検査対象の撮像画像に基づいて検査対象の表面検査を行う表面検査装置であって、検査対象の撮像画像に設定された検査領域内に更に設定される1〜複数のフィルタ領域のそれぞれに対して所定のフィルタ処理を行い、前回フィルタ処理画像と今回フィルタ処理画像との差分値であるフィルタ処理差分画像に対して、フィルタ領域ごとに画素単位でのしきい値処理を施した二値化画像(表面欠陥候補差分画像)を検査領域全体で統合した二値化画像(表面欠陥候補統合化差分画像)の画素値に前回の処理で得られた表面欠陥画像の画素値を加算することで得た二値化画像(表面欠陥候補統合化画像)を用いて表面欠陥の箇所および個数を特定する。
(もっと読む)
撮像装置
【課題】測定対象物を測定しつつ画像を取得するとともに画像を所望の視線方向から観察できる撮像装置を提供する。
【解決手段】撮像装置1は、画像を取得する撮像素子18と、測定対象物Wの被照射領域W1に光線を照射する発光部26および光線を検出する受光部28を有し、発光部から被照射領域までの距離を測定する測定部20と、発光部の位置を測定する位置測定部21と、発光部の向きを測定する姿勢測定部22と、発光部の位置および向き並びに発光部から被照射領域まで距離に基づいて被照射領域の位置および向きを算出する領域状態算出部55と、画像から抽出画像を作成する画像切出し部54と、抽出画像を領域状態算出部により算出された位置および向きに対応付けて記憶する記憶部56と、仮想空間に位置および向きに基づいて配置された抽出画像を視線方向に基づいて変換した視線変換全体画像を作成し表示部に表示させる画像処理部57と、を備える。
(もっと読む)
61 - 80 / 881
[ Back to top ]