
Fターム[2F065QQ00]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761)
Fターム[2F065QQ00]の下位に属するFターム
サンプリング (206)
ピークホールド (43)
A/D変換、多値化 (3,603)
信号の遅延 (75)
信号の微分、差分 (1,068)
信号の積分 (316)
フーリエ変換;逆フーリエ変換 (544)
近似式(例;多項式近似) (1,899)
形状特定のためのパラメータ抽出 (463)
信号の記憶 (4,476)
信号の比較、減算 (4,276)
信号の加算 (639)
信号の特定位置の検出 (2,005)
画像処理(1次元を含む) (5,599)
統計処理 (2,372)
ゲート手段の利用 (33)
カウンター (263)
Fターム[2F065QQ00]に分類される特許
141 - 160 / 881
撮影経路計算装置
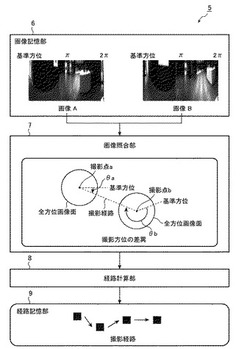
【課題】未知空間内のランドマークや景観の特徴によらず、ロボットの移動に伴うカメラの撮影経路を正確に算出できる撮影経路計算装置を提供する。
【解決手段】撮影点の全周囲の全方位画像を、画像座標系の横軸が方位であり、画像座標系の縦軸が撮影装置4による撮影方向に対するピッチ角である画像に変換して、当該変換後の画像の一定の方位毎にピッチ角で規定される上下方向の画素値の周波数成分を算出し、ロボット1の移動に伴って撮影装置4に撮影された各全方位画像について周波数成分を基に方位を照合することにより、全方位画像間の相対方位を推定して、推定された全方位画像間の相対方位に基づいて、ロボット1の移動に伴う撮影装置4の撮影経路を算出する。
(もっと読む)
視線計測装置、方法及びプログラム

【課題】ユーザの視線を精度よく計測できる視線計測装置、方法及びプログラムを提供する。
【解決手段】この視線計測装置1は、光源7,7からユーザの眼球に向けて照射された光の反射光をカメラ2,2で撮像する撮像手段と、この撮像データを眼球モデルに適用することにより、前記ユーザの注視対象に対する視線を計測する視線計測手段とを備え、眼球モデルは、眼球の光軸を中心として自由曲線を回転することによって構成される回転面からなる非球面回転体モデルであることを特徴としている。
(もっと読む)
校正装置及び測定装置
【課題】角度2点法プローブのゼロ点校正を角度2点法の環境に対するロバスト性を維持しながら、迅速に、精度よく、かつ簡便に実現できる校正装置及び真直形状測定装置を提供する。
【解決手段】校正対象となる2つの角度センサSS1〜SS2を円板CP1〜CP2に対して相対的に固定し、回転角θ=0度において2つの多面鏡CP1〜CP2の傾斜角を、各角度センサセンサSS1〜SS2を用いて測定して第1の測定値を求め、且つ回転角θ=180度において2つの多面鏡CP1〜CP2の傾斜角を、角度センサセンサSS1〜SS2を用いて測定して第2の測定値を求め、第1の測定値と第2の測定値とに基づいて、前記角度センサのゼロ点誤差を校正できる
(もっと読む)
パターン化された構造を測定するための方法およびシステム
パターン化された構造の少なくとも1つのパラメータの測定で使用するための方法およびシステムが提供される。方法は:構造の異なる位置上の測定に対応する複数の測定された信号を含む測定されたデータと、理論的信号と測定された信号との間の関係は、構造の少なくとも1つのパラメータを示す理論的信号を示すデータとを含む入力データを提供する過程と;構造の少なくとも1つの性質を特徴付ける少なくとも1つの選択されたグローバルパラメータに基づきペナルティ関数を提供する過程と;フィッティングプロシージャの前記実行は、理論的信号と測定された信号との間の最適化された関係を決定するために前記ペナルティ関数を使用することと、構造の前記少なくとも1つのパラメータを決定するために最適化された関係を使用することとを含む、理論的信号と測定された信号との間のフィッティングプロシージャを実行する過程と;からなる。 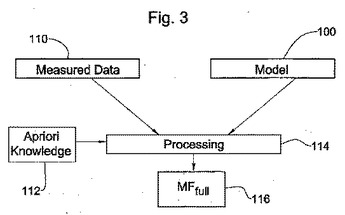 (もっと読む)
(もっと読む)
検査システム、その方法及びプログラム
【課題】作業スペースと設備投資との問題を解決し、外観検査の自動化を行うことが可能な検査システム及びその方法を提供する。
【解決手段】本発明の検査システムは、固定されておらず、不確定な位置で検査対象の外観を撮像し撮像画像とする撮像装置と、予め検査対象を撮像した参照画像を記憶する記憶部と、撮像装置の撮像座標上の撮像画像を、参照画像を撮像した際の参照撮像座標上に座標変換し、変換した結果を比較画像として出力する画像処理部と、参照画像と比較画像とを比較するマッチング処理部とを備える。
(もっと読む)
アタック角測定装置及び測定方法
【課題】レールの踏面の摩耗の影響を排除してアタック角を精度良く測定する。
【解決手段】アタック角測定装置18では、レーザー変位計19a、19bから車輪11の側面11aにレーザー光を照射して車輪11との距離情報を測定する。レーザー変位計20a、20bは、レール10の側面10bにレーザー光を照射してレール10との距離情報を測定する。これらのレーザー変位計は軸箱13の下部に取り付けた車軸12に直交する支持台16に配列固定した。レール10の側面10bは車輪11が走行する踏面の側部であるから、車輪11が走行しても摩耗しない。演算手段では、第一演算部において、車輪11との距離情報から車輪の傾き角を演算し、レール10との距離情報からレール10の傾き角を演算する。第二演算部では、これらの傾き角の差をとってアタック角を算出する。
(もっと読む)
物体形状評価装置
【課題】測定点群と基準点群との合同変換が適正に行われるとともに、基準点群と測定点群とのずれから欠陥を検出する際に型修正に起因する欠陥誤検出が低減される物体形状評価装置を提供する。
【解決手段】物体形状評価装置は、金型を用いて製作された測定対象物の測定点と基準点との間の距離を逐次収束させることで測定点と基準点とを位置合わせする位置合わせ処理手段50と、位置合わせ処理後の基準点と適正に対応せず互いに隣接する複数の測定点からなる誤対応測定点群を欠陥と判定する欠陥評価手段6とを備えている。欠陥評価手段6には、前回での欠陥位置を含む欠陥情報に基づいて当該欠陥を型修正箇所とみなす型修正評価部63と、これによって評価された型修正箇所に関する型修正箇所情報が型修正箇所情報格納部83に登録される。
(もっと読む)
光ファイバセンサを備えた構造物のたわみ量の算定方法および装置
【課題】工事進捗に応じた構造物のたわみ量を算定することができる光ファイバセンサを備えた構造物のたわみ量の算定方法および装置を提供する。
【解決手段】構造物の上側のひずみと下側のひずみとを光ファイバセンサで計測し、光ファイバセンサで計測した上側のひずみと下側ひずみとの差を構造物の上下方向の高さで除算してたわみ量を規定するたわみ曲率を求め、たわみ曲率を構造物の水平方向に関して2回積分して任意の積分定数を含む数式からなる基本たわみ量を求め、基本たわみ量に対して構造物の所定の工事進捗における境界条件を適用して積分定数の値を決定し、決定した積分定数の値が代入された基本たわみ量に基づいて構造物の所定の工事進捗におけるたわみ量を算定するようにする。
(もっと読む)
外観検査装置
【課題】太陽電ウエハの3次元形状を正確かつ高速に算出する。
【解決手段】第1及び第2形状算出部24,34は、撮像部20により所定のフレームレートで連続的に撮像された複数枚の光切断線画像の画像データを基に、ウエハ50の表面の3次元形状データを算出する。ここで、第1形状算出部24は、カメラ21〜23が現フレームの光切断線画像を撮像する期間に、1つ前のフレームに探索処理を行うと同時に、2つ前のフレームの光切断線画像に重心算出処理を行う。
(もっと読む)
誘導飛翔体装置
【課題】誘導飛翔体において、複数の赤外線センサーにより、目標に向け誘導するセンサーシステムを提供する。
【解決手段】誘導飛翔体装置の側面に複数の分散させたウインドウ1を配置して、そのウインドウ1を開口として視野の一部を重なるように複数のセンサ部2を配置し、視野の重なる領域で別々のセンサ部2が探知した目標が同一か否かを判定する同定処理部9を有することで、異なるセンサ部2の視野の間で移動する同一の目標を追尾することができる。
(もっと読む)
原料ヤードの原料山計測システム、原料ヤードの原料山計測方法、及びコンピュータプログラム
【課題】 原料ヤードにおける原料山の状態を従来よりも高精度に計測できるようにする。
【解決手段】 ブーム106aに取り付けられた2Dレーザ距離計101a、101bから原料山100にレーザ光を照射し、原料山100からの反射光を受光し、受光した反射光と、そのときのレーザ光の照射方向とから求められる原料山100の表面の座標を、IMU103及びGPSコンパス104で測定されるブーム106aの姿勢に基づいて変更し、変更した原料山100の表面の座標に基づいて、原料山100の3次元形状と、原料山100の体積とを計算し表示する。
(もっと読む)
膜濾過工程用現場検出分析装置
【課題】 膜濾過工程用現場検出分析装置の提供。
【解決手段】 本発明は光感知装置と駆動装置とデータ処理装置とを備えた膜濾過工程用現場検出分析装置開示する。前記光感知装置は線形の第一アレイに配列される複数の感知素子を含有して、線形の位置にケーキ層の厚み変化に関する信号を検出する。前記駆動装置は前記光感知装置は少なくとも一つの局部平面にケーキ層の厚み変化を検出できるように、前記ケーキ層上に平行に前記濾材と前記光感知装置との相対的移動ことができるように前記光感知装置を駆動する。前記データ処理装置は前記光感知装置を接続し、前記光感知装置から検出され前記信号を連続的に処理と分析する、さらにすぐにこの膜濾過工程中に少なくとも一つの局部平面にケーキ層の厚み変化を算出する。
(もっと読む)
波面操作および改良3D測定方法および装置
【課題】光学システムにおいて、位相および振幅情報を含む波面分析、ならびに3D測定を実行する方法および装置、特に、光学システムの画像面のような、中間面の出力の分析に基づく方法および装置を提供する。
【解決手段】 薄膜コーティング、または多層構造の個々の層が存在する表面トポグラフィの測定について記載する。多重波長分析を、位相および振幅マッピングと組み合わせて利用する。マクスウェルの方程式の解に基づき、仮想波面伝搬を用いて、波面伝搬および再合焦によって位相および表面トポグラフィの測定を改良する方法について記載する。このような位相操作方法によって、または広帯域およびコヒーレント光源の組み合わせを利用する方法によって、光学撮像システムにおいてコヒーレント・ノイズの低減を達成する。本方法は、集積回路の分析に適用され、コントラストを高めることにより、または1回のショット撮像における3D撮像によってオーバーレイ測定技法を改善する。
(もっと読む)
外観検査装置、外観検査システムおよび外観検査方法
【課題】検査対象の良否を判定する際に欠陥領域を途切れないように検出する。
【解決手段】外観検査システム1において、外観検査装置3の画像処理部321は、濃淡画像を用いて微分2値化画像を作成する。第1の抽出部322は、同一の欠陥候補領域を構成する画素群を抽出する。検出部324は、各ラインごとに、微分絶対値が閾値以上である画素をエッジ画素として検出する。第2の算出部326は、第2の抽出部325で抽出された欠陥領域について水平方向の射影幅と垂直方向の射影幅とを求める。判定部327は、水平方向の射影幅と垂直方向の射影幅との少なくとも一方が基準値より大きい場合に、検査対象Aが不良であると判定する。上記検出部324は、第1の算出部323で求められた欠陥幅が最大となるラインから順に各ラインごとにエッジ画素を検出し、欠陥幅が狭いほど次のラインの閾値が低くなるように次のラインの閾値を設定する。
(もっと読む)
マシンビジョン検査システム用の光学収差補正
【課題】 マシンビジョン検査システム用の光学収差補正を提供する。
【解決手段】 光学収差に対して表面高さ測定値を補正するためのシステムおよび方法が提供される。オートフォーカスツールによって決定される高さは、焦点関心領域(ROI)における表面特徴角度および視野におけるROI箇所に依存し得るが、新しい誤差校正に基づいて補正される。誤差校正データには、画像における異なる特徴角度用の、および視野における複数の箇所用の高さ補正値が含まれる。高さ補正値は、例えばROIにおいて決定された勾配(エッジ)角度分布に基づき、角度依存性の誤差校正データを重み付けし、組み合わせることによって決定される。視野における複数のROI用にZ高さが決定されると、グローバル画像スタックの特定の画像からの画像データの記憶は、特定の画像が、十分に合焦された「近ピーク」焦点画像であるかどうかを、処理の初期に決定することに基づいて、効率的に制御することが可能である。
(もっと読む)
距離測定装置
【課題】外乱光が存在する測定環境においても、測定対象物におけるレーザ反射光の抽出を高速且つ高精度に実行可能な距離測定装置を提供する。
【解決手段】照射方向を変化させながら、測定対象物Wにスリット状のレーザ光を照射する照射装置2と、撮影方向を変化させながら、測定対象物Wで反射したレーザ光の反射光を撮影画像として取り込む撮像装置3と、照射装置2及び撮像装置3の動きを制御する制御装置4と、撮影画像に2値化処理及びラベリング処理を施した処理画像を作成する画像処理部5と、処理画像に含まれる反射光と外乱光とを区別するために用いられる所定の物理量を、ラベリングされた領域ごとに演算する物理量演算部6と、少なくとも2枚の処理画像を比較して、対応する領域の物理量の変化量を算出し、変化量が予め設定した閾値を超過している領域のデータを消去する外乱光消去部7と、を備えた距離測定装置1。
(もっと読む)
3次元計測装置及びその制御方法
【課題】コード化パターンの投影を用いた3次元位置計測を高速に行なえるようにする。
【解決手段】計測対象物体の位置姿勢を計測する3次元計測装置は、計測対象物体に投影するパターンを生成し、生成された複数種類のパターンを投影部により計測対象物体に投影して撮像部により撮影するとともに、投影したパターンと計測対象物体の形状モデルと計測対象物体の概略位置姿勢を示す情報とに基づいて、撮像により取得される撮像画像上のパターンの座標値を算出する。そして、算出された座標値を利用して、撮像画像上の撮影されたパターンと前記投影部により投影されたパターンとを対応づけし、計測対象物体に投影されたパターンと撮像部との距離を求める。また、求めた距離と当該計測対象物体の形状モデルとを用いて計測対象物体の位置姿勢を推定し、概略位置姿勢の情報を更新する。
(もっと読む)
オブジェクトを使用した慣性航法システムの整合および較正
慣性航法システムの初期化が、オブジェクトの画像から取得される情報を使用して、実行される。グローバル基準フレーム内のオブジェクトに対する位置および向き情報と、前記オブジェクトに対するカメラに関する位置および向き情報が、前記画像から取得される。前記グローバル基準フレーム内の前記カメラの位置および向き情報が、慣性センサ基準フレームおよび航行座標フレームの間の変換マトリックスとともに、判断される。慣性航法システムが、前記カメラの位置および向き情報と、前記変換マトリックスと、前記オブジェクトが画像化されたときの前記カメラの速度、すなわちゼロ、とを使用して、初期化される。慣性センサからの測定値と初期化データを使用して、モバイルプラットフォームの位置が、航行中に更新され、デジタルマップ上などに、提供され得る。慣性航行エラーは、異なるオブジェクトの画像から取得される情報を使用し、修正され得る。  (もっと読む)
(もっと読む)
測位装置及び測位方法
【課題】移動体の位置及び姿勢を継続的に且つより精度良く推定すること。
【解決手段】周辺領域の画像を経時的に撮像する撮像部1と、移動体200の移動量を検出する慣性センサ2と、を備える移動体200の位置及び姿勢を推定する測位装置100に、撮像部1によって撮像された時刻tにおける画像と時刻t+Δtにおける画像とを比較することにより、移動体200の並進ベクトルhimgと回転行列Rimgとを算出する画像処理部3と、慣性センサ2によって検出された移動量に基づいて、移動体200の並進ベクトルhinsと回転行列Rinsとを算出する慣性算出部4と、並進ベクトルhimgと回転行列Rimgとに基づいて、並進ベクトルhinsと回転行列Rinsとに含まれる誤差量を推定するカルマンフィルタ5と、を備え、誤差量に基づいて、慣性センサ2によって検出された移動量を補正するように構成した。
(もっと読む)
対象物の位置特性の判定
室内の対象物の位置特性を判定するシステムであって、部屋の検出領域のため背景表面に配置された、光学的に識別可能な要素(103)を含むシステムを提案する。カメラ(101)が光学的に識別可能な要素(103)の向かい側に検出領域を横切って配置され、検出領域と光学的に識別可能な要素とを含む画像を取得する。検出器(403)が光学的特性に基づいて画像内の光学的に識別可能な要素を検出する。閉塞プロセッサ(405)が光学的特性に応じて画像内の光学的に識別可能な要素(103)の閉塞特性を判定する。位置プロセッサ(407)が閉塞特性に応じて深さ位置を判定し、その深さ位置はカメラ(101)の光軸に沿った対象物の位置を示す。本発明は例えば室内の人物の存在や大まかな位置測定を可能にしてもよい。 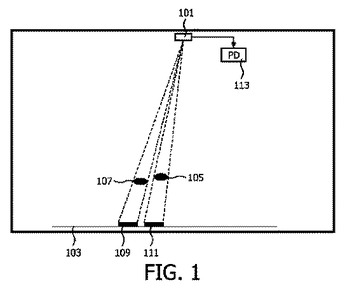 (もっと読む)
(もっと読む)
141 - 160 / 881
[ Back to top ]