
Fターム[2F065QQ00]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761)
Fターム[2F065QQ00]の下位に属するFターム
サンプリング (206)
ピークホールド (43)
A/D変換、多値化 (3,603)
信号の遅延 (75)
信号の微分、差分 (1,068)
信号の積分 (316)
フーリエ変換;逆フーリエ変換 (544)
近似式(例;多項式近似) (1,899)
形状特定のためのパラメータ抽出 (463)
信号の記憶 (4,476)
信号の比較、減算 (4,276)
信号の加算 (639)
信号の特定位置の検出 (2,005)
画像処理(1次元を含む) (5,599)
統計処理 (2,372)
ゲート手段の利用 (33)
カウンター (263)
Fターム[2F065QQ00]に分類される特許
161 - 180 / 881
オブジェクトを使用した慣性航法システムの整合および較正
慣性航法システムの初期化が、オブジェクトの画像から取得される情報を使用して、実行される。グローバル基準フレーム内のオブジェクトに対する位置および向き情報と、前記オブジェクトに対するカメラに関する位置および向き情報が、前記画像から取得される。前記グローバル基準フレーム内の前記カメラの位置および向き情報が、慣性センサ基準フレームおよび航行座標フレームの間の変換マトリックスとともに、判断される。慣性航法システムが、前記カメラの位置および向き情報と、前記変換マトリックスと、前記オブジェクトが画像化されたときの前記カメラの速度、すなわちゼロ、とを使用して、初期化される。慣性センサからの測定値と初期化データを使用して、モバイルプラットフォームの位置が、航行中に更新され、デジタルマップ上などに、提供され得る。慣性航行エラーは、異なるオブジェクトの画像から取得される情報を使用し、修正され得る。  (もっと読む)
(もっと読む)
面位置検出装置、露光方法及び装置、並びにデバイス製造方法
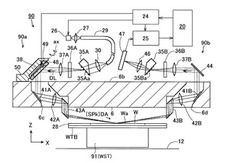
【課題】振動ミラーを用いて被検面の面位置を検出する際に、計測値のドリフトを小さくして、計測精度を向上させる。
【解決手段】被検面の面位置情報を検出するAF系90において、検出光DLを被検面に斜めに投射する投射系90aと、その被検面で反射される検出光を受光する受光系90bと、投射系90a内で検出光DLを反射する反射面が形成された可動部と、その可動部を支持する1対の支持部とを有する振動ミラー38と、振動ミラー38の支持部が固定される保持部材48と、振動ミラー38の可動部を振動させる駆動部49と、受光系90bで得られる検出信号をその可動部の振動に同期して処理する信号処理系25と、を備える。
(もっと読む)
測定顕微鏡

【課題】本発明は、比較的安価で狭視野なテレセントリックレンズなどの光学系レンズを使用して高精度、かつ全体を見渡した測定を行うことが可能となる測定顕微鏡に関するものである。
【解決手段】本発明は、ステージ1上に載置された被検物Bを撮影するために光学系レンズ5を装着した被検物撮影カメラ2と、前記被検物B周辺を含んで撮影する周辺撮影カメラ4とを設置し、前記周辺撮影カメラ4で撮影した映像内に前記被検物撮影カメラ2で撮影した映像を出力した測定顕微鏡Aである。
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体
【課題】 検査対象物のタイヤ内側が撮影された画像から欠陥と刻印文字とを判別することができる画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体を提供する。
【解決手段】 テンプレート領域設定工程a2では、判別対象が含まれる位置にテンプレート領域を設定する。自己相関値算出工程a3では、自己相関値を算出し、差分処理工程a4では、相関差分値を算出する。極大位置検出工程a5では、相関差分値の極大位置を検出する。偏差値算出工程a6では、極大位置の間隔を算出し、極大位置の間隔の偏差値を算出する。線状模様数算出工程a10では、画像中のブラダーグルーブの合計数を算出する。判定工程a7,a8,a11,a13では、極大位置の間隔の偏差値とブラダーグルーブの合計数とに基づいて、判別対象が刻印文字および欠陥のうちのいずれであるかの判定を行う。
(もっと読む)
画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体
【課題】 画像中のブラダーグルーブを検出し、検出したブラダーグルーブを画像中から除去する画像処理方法、画像処理装置、画像処理プログラムおよび記録媒体を提供する。
【解決手段】 画像処理方法は、濃度射影変換工程と、フーリエ展開工程と、周期算出工程と、逆フーリエ展開工程と、出力工程とを含む。濃度射影変換工程では、第1画像に第1方向の濃度射影変換を行って第2画像を作成する。フーリエ展開工程では、第2画像中の第2方向に並ぶ画素の濃度値をフーリエ展開する。周期算出工程では、第1画像中の線状模様の第2方向の周期を算出する。逆フーリエ展開工程では、フーリエ展開された周波数成分から、線状模様の周期を表す周波数成分を除去し、残余の周波数成分を逆フーリエ展開して第3画像を作成する。出力工程では、逆フーリエ展開工程で作成された第3画像を表す除去済画像情報を出力する。
(もっと読む)
3次元形状計測方法および3次元形状計測装置
【課題】位相シフト法を用いて計測対象物の3次元形状を計測する際に、実際には存在しない凹凸が生じることを抑制する。
【解決手段】縞パターンを計測対象物に投影し、前記計測対象物を撮影する。前記縞パターンの位相を所定方向にずらしながら前記投影および前記撮影を順次繰り返す第1ステップと、前記第1ステップで得られた複数の撮影画像における同一画素での受光量変化に基づいて、各画素における前記縞パターンの位相を演算する第2ステップと、撮影画像の各画素の位相に基づいて前記計測対象物の3次元形状を特定する第3ステップとを備える。前記第2ステップにおいて、各画素の位相を演算する際に、少なくとも当該画素の前記所定方向の両隣に位置する2つの画素の受光量に基づいて、当該画素の受光量変化を補正する。
(もっと読む)
内部変状検出支援装置及び内部変状検出支援プログラム
【課題】表面の凹凸に基づく温度分布を識別して、内部変状箇所を検出することを支援できる内部変状検出支援装置及び内部変状検出支援プログラムを提供する。
【解決手段】計測結果取得部36が、レーザスキャナ及び赤外線熱計測装置の計測結果を取得すると、変換部38は、計測結果取得部36が取得した赤外線熱計測装置の計測結果を画像データに変換し、熱画像を生成する。また、対応付け部40は、変換部38が生成した熱画像を、座標計測装置が計測した赤外線熱計測装置及びレーザスキャナの計測位置の座標値に基づいて、レーザスキャナの計測結果の凹凸データを対応付ける。表示制御部46は、上記熱画像と、これに対応する凹凸データとを表示装置に表示させ、利用者による対象物の内部変状検出業務を支援する。
(もっと読む)
厚み情報取得装置、厚み情報取得方法、厚み情報取得プログラム及び顕微鏡
【課題】本発明は、サンプルの厚み情報を短時間で精度よく取得する。
【解決手段】本発明は、取得した位相差像の基準像に対する相関状態を算出し、該相関状態に応じて組織切片TSの厚み情報を取得するようにしたことにより、1つの位相差像から組織切片TSの厚み情報が取得でき、またサンプルの厚み方向の分布を反映した厚み情報を取得することができ、かくして厚み情報を短時間で精度よく取得することができる。
(もっと読む)
3次元形状計測方法および3次元形状計測装置
【課題】位相シフト法と空間コード法とを利用し、計測対象物の3次元形状を正確に測定することのできる新たな計測方法および計測装置を提供する。
【解決手段】空間コード法の利用に際して、明暗の境界が縞パターンの各周期の境界からそれぞれ+π/2、−π/2ずれた第1、第2の空間コードパターンを用いる。位相シフト法で求めた画素の相対位相φが0<φ<+πのときには前記第1の空間コードパターンを使用し、−π<φ<0のときには前記第2の空間コードパターンを使用することによって、位相接続を行う。
(もっと読む)
3次元形状計測方法及び3次元形状計測装置
【課題】信頼性の高い3次元形状計測結果を得る。
【解決手段】3次元形状計測装置20は、対象物体を含む測定空間を分割する空間コードに対応した複数の投影パターンを、対象物体に順次投影して撮像した複数の撮像画像を用いて、各画素を輝度値に応じて2値化して空間コードに変換する空間コード算出手段23と、変換した空間コードを用いた三角測量により画素毎に3次元情報を算出して対象物体の3次元形状を求める三角測量手段26と、画素毎の3次元情報に基づいて、注目画素と隣接画素の高さを比較し、高さの差が所定範囲内の画素同士を連結して連結領域を設定し、連結領域の面積が所定値より小さい場合にノイズと判定するノイズ判定手段24と、ノイズと判定された連結領域の3次元情報を除去するノイズ除去手段25とを備える。
(もっと読む)
ツール寸法の計測方法、ツール寸法の計測装置、およびその計測装置を備えるロボット
【課題】ロボットのツール取付け部に取付けられているツールの寸法を計測する。
【解決手段】ロボット10のツール取付け部10gに対するツール基準点Tの位置を計測する方法であって、カメラ14が実際のツール基準点Tを撮影した状態で、ツール取付け部10gに対する任意位置を通過する任意回転中心線を中心として該ツール取付け部が回転するようなロボット10の動作を繰り返し実行する。また、ツール取付け部10gが回転する度にその回転によって移動した実際のツール基準点Tのカメラ撮影画像上における移動量を計測する。さらに、ツール取付け部10gの回転が終了する度に任意位置および/または任意回転中心線を変更する。これらにより、ツール取付け部10gの回転によって移動する実際のツール基準点Tのカメラ撮影画像上における移動量が略ゼロになる任意位置を特定し、特定した任意位置をツール取付け部10gに対するツール基準点Tの位置とする。
(もっと読む)
コークス炉壁観察装置のカメラ校正方法およびプログラム
【課題】校正用ターゲットを用いることなく、カメラ校正を実施することができるコークス炉壁観察装置のカメラ校正方法およびプログラムを提供する。
【解決手段】カメラ30をコークス炉10内に挿入し、炉壁画像OIを撮影し、炉壁画像OIを視点変換処理して視点変換画像TIを生成するコークス炉壁観察装置における、カメラ30の取り付けを校正するために、コークス炉10の形状を指標としてカメラ校正を行う。カメラ30の取り付け誤差の影響のない視点変換画像TIを生成することができ、炉壁全体画像WIの合成を行っても視点変換画像TIの繋ぎ目で不一致が生じることがない。校正用ターゲットを高温となるコークス炉内に設置する必要がない。
(もっと読む)
物体の三次元の表面形状の評価方法及び評価装置並びに車両用窓ガラスの製造方法
【課題】本発明は、物体の三次元の表面形状の評価方法及び評価装置並びに車両用窓ガラスの製造方法に関し、物体の三次元の表面形状を評価するうえでその表面に形成される反射歪みの定量的な検出を可能にすることにある。
【解決手段】対象物体の三次元の表面形状のデータを取得させると共に、その取得された表面形状のデータの2次微分値を算出させる。また、対象物体に要求される三次元の仮想形状データを算出させると共に、その算出された仮想形状データの2次微分値を算出させる。そして、その算出された対象物体の三次元の表面形状の2次微分値と、仮想形状データの2次微分値との差を算出させ、その差に基づいて、対象物体の表面形状を評価させる。
(もっと読む)
チャックテーブルに保持された被加工物の計測装置およびレーザー加工機
【課題】チャックテーブルに保持された被加工物の上面位置を正確に計測することができる計測装置および計測装置を装備したレーザー加工機を提供する。
【解決手段】発光源61からの光を第1の経路に導くとともに第1の経路を逆行する反射光を第2の経路に導く第1の光分岐手段62と、コリメーションレンズ63によって平行光に形成された光を第3の経路と第4の経路に分ける第2の光分岐手段64と、第3の経路に配設され第3の経路に導かれた光をチャックテーブル36に保持された被加工物Wに導く対物レンズ65と、集光レンズ66と、第4の経路に導かれた平行光を反射して第4の経路に反射光を逆行せしめる反射ミラー67と、第2の経路に導かれた反射光を回折する回折格子69と、回折格子69によって回折した反射光の所定の波長域における光強度を検出するイメージセンサー71とを具備している。
(もっと読む)
干渉計測方法
【課題】被検物に対する被検面の形状測定データの座標を高精度に求めること。
【解決手段】マーク形成工程(S1)と、形状測定工程(S2)と、マーク検出工程(S3)と、座標算出工程(S4)とからなる干渉計測方法であり、S1のマーク形成工程では、被検物の被検面に基準マークを形成する。マーク検出工程では、形状測定工程で得られた形状測定データからエリアセンサの座標系を基準とする基準マークの位置を検出する。座標算出工程では、マーク形成工程にて形成された被検物の座標系を基準とする基準マークの位置情報と、マーク検出工程にて検出されたエリアセンサの座標系を基準とする基準マークの位置情報との対応関係を求める。この対応関係に基づき、形状測定工程により得られた形状測定データを被検物の座標系に変換する演算を行う。
(もっと読む)
スペックルの定位方法およびその定位系統
【課題】 不変形レーザスペックル映像を用いて二次元の精密な定位を行う方法及び系統を提供することを目的とする。
【解決手段】 本発明において、予め広い同調性を有するレーザ光を定位母板に照射し、該定位母板から散乱された光が干渉して生成した不変形スペックルを記録し、スペックルテーブルを作成し、基準点を定義し、記録された各スペックルを定位する。該スペックルテーブルから、いずれのスペックルに対応する座標位置を獲得することができ、さらに定位物の定位を導くことも距離の測量を適用することもできる。本発明は、キャプチャしたスペックルを数マイクロメーターに制御し、高精度の定位を行うことができる。
(もっと読む)
半導体ウェーハの形状測定方法およびそれに用いる形状測定装置
【課題】大口径ウェーハに用いることができる半導体ウェーハの端部形状を測定する方法およびそれに用いる形状測定装置を提供する。
【解決手段】発光部2aが発する光を半導体ウェーハ12の端部で反射させ、受光部2bで検出して端部との距離を測定する距離測定手段2と、距離測定手段2を一定の角度範囲で揺動可能に支持する第1揺動機構と、第1揺動機構を一定の角度範囲で揺動可能に支持する第2揺動機構とを備える形状測定装置を用いる形状測定方法であって、第2揺動機構の所定角度ごとにおいて、距離測定手段2の発光部2aが発する光を端部に反射させ、受光部2bで受光量を測定し、受光量が最大となる第1揺動機構の角度を求め、当該角度における距離測定手段による測定距離と、第1揺動機構の当該角度および第2揺動機構の所定角度から座標変換により輪郭点を算出し、端部の輪郭形状を示す点郡データを得る。
(もっと読む)
三次元形状測定装置
【課題】 連続移動する測定対象物の三次元形状を、位相シフト法により高速に測定すると共に、垂直解像度や深度を柔軟に設定できる構成とする。
【解決手段】
被測定対象物に対して斜め上方から、投影方向に沿って光の強度が正弦波状に変化する格子縞を投影する格子縞投影器1と、鉛直上方に位置しエリアセンサ6を備えたカメラ2と、被測定対象物を一定方向へ移動させるステージ3とを備え、格子縞は位相が互いにπ/2ずつシフトした4つの帯状領域に分かれており、エリアセンサ6上の各帯状領域につき一本の水平ライン、計4本から画像を読出し、位相シフト法の原理を用いて位相を算出して高さに変換し、被測定対象物の三次元形状を測定する。
(もっと読む)
板材の光学式形状測定方法及び測定装置
【課題】測定値がばらつき、エッチング加工される精密部品の母材に要求される形状精度を保障可能な測定精度を確保する。
【解決手段】板材形状測定範囲内での等間隔の棒状光源配置と位相変化測定板材上方に棒状光源を配置して、板材表面に観察される棒状光源の鏡像をカメラにて撮影した画像に基づき板材の形状を測定する板材の光学式形状測定方法において、
複数の棒状光源を板材形状測定範囲にわたって等間隔に配置し、カメラにて撮影した画像上の棒状光源の配列方向に垂直な方向の周期的な輝度分布波形を得て、
フラットな基準平面測定時の周期的な輝度分布波形に対する位相変化量を測定することにより、板材表面の角度分布を求めることにより、板材の光学式形状を測定する。
(もっと読む)
パターンマッチング装置およびそれを用いた半導体検査システム
【課題】CADデータに対応する画像データの位置情報を検出するパターンマッチング装置において、CADデータの形状とホールパターンの形状が大きく異なる場合でも、正確にパターンマッチングする。
【解決手段】ホールパターンの中心位置を画像化したデータ111を生成するCADホールパターン中心位置検出手段107と、画像データ105からパターンデータ112を抽出するパターン抽出手段108と、パターンデータ112からホールパターンの中心位置を検出し、画像データ105から検出したホールパターンの中心位置を画像化したデータ113を生成する手段109と、CADホールパターン中心位置データ111と画像ホールパターン中心位置データ113との照合処理により、CADデータ104に対応する画像データ105の位置データ114を検出する照合処理手段110と、信号出力インターフェース103と、で構成する。
(もっと読む)
161 - 180 / 881
[ Back to top ]