
Fターム[2F065QQ07]の内容
光学的手段による測長装置 (194,290) | 信号処理 (28,761) | A/D変換、多値化 (3,603) | 2値化 (1,922) | 微分又は差分2値化 (42)
Fターム[2F065QQ07]に分類される特許
1 - 20 / 42
位置姿勢計測装置、その処理方法及びプログラム
外観検査方法及びその装置
【課題】複雑形状をした物体の外観検査において、目視では検出困難な形状の不良を定量的に評価し、検出する物体の外観検査方法及びその装置を提供することにある。
【解決手段】
物体の外観を検査する方法を、検査対象物体を載置して少なくとも一方向に連続的に移動させながら検査対象物体を撮像して検査対象物体の表面のテクスチャ情報を含む検査対象物体の画像を取得しながら検査対象物体の表面凹凸情報を取得し、この取得した検査対象物体の表面凹凸情報から検査対象物体の立体形状を復元し、取得した画像と復元した検査対象物体の立体形状とから表面テクスチャを持った物体の外観情報を得、この得られた外観情報から複数の特徴を抽出し、この抽出した複数の特徴のうち少なくとも1つの特徴を予め設定した参照データの前記少なくとも1つの特徴に対応する特徴と比較して検査対象となる物体の外観を評価するようにした。
(もっと読む)
マスク検査方法およびその装置

【課題】検査時間および労力を低減できるマスク検査方法およびその装置を提供する。
【解決手段】実施形態によれば、マスク検査方法は、半導体露光用マスクに任意波長の光を入射させ撮像部にて像を取得する光学系を用いて、前記マスクの欠陥の有無を検査する方法であって、予め前記光学系による点像を、前記撮像部の読み出し方向に伸長される制御条件を取得する第1ステップ(S203)と、前記制御条件により、マスクの所望の領域の像を取得する第2ステップ(S205)と、取得した前記所望の領域の像において、信号強度が予め定めておいた第1閾値以上であり、前記信号強度の前記読み出し方向における差分が予め定めておいた第2閾値以下であるピーク信号が存在する場合、前記ピーク信号の座標を欠陥として判定する第3ステップ(S206)とを具備する。
(もっと読む)
検査装置、検査方法および検査プログラム
【課題】検査精度を保ちつつスループットを向上させることができる検査装置、検査方法および検査プログラムを提供すること。
【解決手段】高倍率で基板の検査測定を行うミクロ検査部と、基板の全体画像をもとに各画素の輝度を算出して全体画像内のムラを検査するマクロ検査部と、全体画像に対して測定を行う測定点を、仮測定点として割り付ける設定部と、各画素の輝度をもとに全体画像を構成する画素をグループ化する分類部と、分類部がグループ化した領域において存在する仮測定点から少なくとも1つの仮測定点を選択して、選択された仮測定点を実測定点として決定する決定部と、実測定点の測定乃至検査をミクロ検査部に行わせるとともに、各実測定点における検査結果を同一の領域における仮測定点にそれぞれ割り付けて検査結果の出力制御を行う制御部と、を備えた。
(もっと読む)
光学式変位センサ及び該光学式変位センサにおける段差検出方法
【課題】段差候補となる期間を検出してから、ベルトコンベア等の搬送装置の振動等による変位量の変動、時間方向の変位量の変動の影響を低減し、より確実に段差を検出することができる光学式変位センサ及び該光学式変位センサにおける段差検出方法を提供する。
【解決手段】受光器の出力に基づいて検出対象物の変位量を算出し、所定のタイミングでサンプリングする。前回サンプリングした変位量と今回サンプリングした変位量との差分値を算出し、算出した差分値に基づいて段差期間と非段差期間とを判別する。段差期間と判別された期間における差分値の積算値を算出し、段差期間と判別された期間ごとに算出した積算値の最大値と第一の閾値とを比較して段差であるか否かを判別する。
(もっと読む)
形状測定装置、形状測定制御プログラム及び形状測定方法
【課題】テーブル等の移動に伴う誤差を排除することができ、被測定物の形状を高精度に測定可能な手段を提供する。
【解決手段】形状測定装置LMSは、被測定物Wと第1、第2プローブ光とを相体移動させるワーク移動ユニット10及びミラーユニット30と、被測定物Wの測定面に照射位置が所定間隔離れた第1,第2プローブ光を照射するとともに、反射光の位置に応じた第1,第2受光信号を出力する光学入ニット20と、これらの作動を制御する制御ユニット50とを備える。制御ユニット50は、測定面の測定部位を測定ラインに沿って前記所定間隔と同程度離間した位置に順次移動させ、各測定部位ごとに第1、第2プローブ光の照射位置の傾斜角度を算出させ、算出された複数の測定部位の傾斜角度情報に基づいて測定ラインに沿った測定面の形状を導出するように構成される。
(もっと読む)
移動方向検知装置
【課題】光センサの特性ばらつきにかかわらず、より精度よく物体の移動方向を検知することが可能な移動方向検知装置を提供する。
【解決手段】移動方向検知装置1は、マトリックス状に配置された4つのボロメータ11〜14と、情報処理ユニット20とを備える。各ボロメータ11〜14は、基準抵抗器111と直列に接続され、赤外線の強度に応じて抵抗値が変化するボロメータ素子112と、センサ信号を微分して微分信号を取得する微分回路113とを備える。情報処理ユニット20は、入力された微分信号のピークを検出するピーク検出部23と、隣り合う第1ピークP1と第2ピークP2との時間間隔が所定時間以内の場合に、マトリックスの対角線毎にボロメータ11〜14の微分信号の時間的相関値を演算する時間的相関値演算部24と、時間的相関値の積算値の正負に基づいて、物体の移動方向を判定する移動方向判定部25とを備える。
(もっと読む)
クロスマーク検出装置及び方法、並びにプログラム
【課題】テンプレートに頼らず、各画素の周囲の輝度の変化を検出することで、安定したクロスマークの検出を行う。
【解決手段】クロスマーク検出装置は、画像中の各点についてクロスマークの中心を判定して、クロスマーク候補点画像とするクロスマーク候補画像作成手段と、クロスマーク候補画像を太線化し、領域分割して近傍にあるクロスマーク候補点に同じ領域番号を付与した領域画像を出力するクロスマーク候補画像太線化手段と、クロスマーク候補点に対して近傍の輝度情報を使って二直線の交点としてクロスマーク中心座標を計算するクロスマーク中心座標計算手段と、同一の領域番号を持つ点の中で最大のスコアを持つ点を領域の代表点としてクロスマークの中心であると判定する代表点採用手段とから成る。
(もっと読む)
画像処理装置
【課題】本発明は撮像手段により撮像して得られた撮像対象の動画像におけるフレーム画像を取得し、取得されたフレーム画像間での前記撮像対象の濃度の動きをベクトルで表現するオプティカルフローを算出する画像処理装置を提供する。
【解決手段】本発明の画像処理装置は、前記フレーム画像における前記撮像対象のエッジを抽出し、該エッジを構成する所定点でのオプティカルフローを算出し、算出された所定点でのオプティカルフローから該所定点の奥行きを算出し、前記所定点での奥行きにFOEのY座標からの距離に応じて変化する変数を乗算して補正奥行きを算出し、前記補正奥行きから所定点における三次元情報を復元する。
(もっと読む)
パンタグラフ監視装置
【課題】列車の屋根上を撮影した画像を解析して、パンタグラフの舟体又はこの舟体に設置されているすり板の折れの有無を検出することを可能としたパンタグラフ監視装置を提供する。
【解決手段】列車の屋根上を撮影する監視カメラと、監視カメラによって撮影された検査パンタグラフ画像を画像処理することによりパンタグラフの状態を監視する画像処理部とを備えたパンタグラフ監視装置において、画像処理部が、検査パンタグラフ画像中に撮影されているパンタグラフに対して直線を抽出する処理を行う直線抽出部5gと、抽出した直線の状態に基づいてパンタグラフの舟体もしくはすり板又はその両方の折れの有無を判断する折れ判断部5hとを備えるパンタグラフ舟体形状検査部5Cを有する構成とした。
(もっと読む)
外観検査装置、外観検査システムおよび外観検査方法
【課題】検査対象の良否を判定する際に欠陥領域を途切れないように検出する。
【解決手段】外観検査システム1において、外観検査装置3の画像処理部321は、濃淡画像を用いて微分2値化画像を作成する。第1の抽出部322は、同一の欠陥候補領域を構成する画素群を抽出する。検出部324は、各ラインごとに、微分絶対値が閾値以上である画素をエッジ画素として検出する。第2の算出部326は、第2の抽出部325で抽出された欠陥領域について水平方向の射影幅と垂直方向の射影幅とを求める。判定部327は、水平方向の射影幅と垂直方向の射影幅との少なくとも一方が基準値より大きい場合に、検査対象Aが不良であると判定する。上記検出部324は、第1の算出部323で求められた欠陥幅が最大となるラインから順に各ラインごとにエッジ画素を検出し、欠陥幅が狭いほど次のラインの閾値が低くなるように次のラインの閾値を設定する。
(もっと読む)
タイヤ形状検査方法、及びタイヤ形状検査装置
【課題】凹凸マーク上に重なるように凹凸欠陥が存在する場合にも、本来の凹凸マークの高さ分だけを差し引いて凹凸欠陥のみの高さを算出・取得する。
【解決手段】サンプルタイヤのサイドウォール面の二次元画像であるサンプル原画像において、凹凸マークの輪郭である境界線を検出し、境界線の位置を示すマスク画像を生成するマスク画像生成工程と、サンプル原画像において、マスク画像に示された境界線の位置に対応する領域を除き、残りの領域の高さを離散的な複数の高さ閾値を用いて分類することで得られる高さオフセット画像を生成する高さオフセット画像生成工程と、検査タイヤのサイドウォール面の二次元画像である検査画像から、高さオフセット画像を差し引くと共に、マスク画像が表す境界領域を除去する差分処理工程とを経て、差分処理工程の結果として得られた凹凸除去画像に基づいて、検査タイヤのサイドウォール面の形状欠陥を検査する。
(もっと読む)
画像処理方法、画像処理装置、プログラムおよび記録媒体
【課題】 タイヤの種類、タイヤ表面の状態および照明の位置関係に依存することなく、凹凸欠陥を検出することができ、検査の安定化を図ることができる画像処理方法、画像処理装置、プログラムおよび記録媒体を提供する。
【解決手段】 制御部12は、第1の方向、たとえばタイヤ回転方向での各画素の濃度を微分した微分値に基づいて、欠陥候補が大規模凹凸欠陥であるか否かを、凹凸の種類ごとに予め定める専用しきい値に基づいて判定する。次に、画像を構成する画素のうち最小の濃度の画素の位置を中心とする第1の方向での予め定める微分範囲について、画素の濃度を微分した微分値を加算した微分和に基づいて、小規模凹欠陥であるか否かを判定する。さらに、各画素を中心とする第1の方向での予め定める微分幅での微分値に基づいて、鋭角凹欠陥であるか否かを判定する。
(もっと読む)
エッジ検出方法及び画像処理装置
【課題】被撮像物の材質あるいは背景や周辺環境、さらには、光源の照明方向や明るさに左右されることなく被撮像物のエッジ位置を正確に検出する。
【解決手段】被撮像物IOのエッジを検出するために、制御部3は、被撮像物を実質的に半円形状で囲むように複数設けられた光源LEDを予め定められた順番で1つずつ点灯させることで、その点灯タイミングに同期して被撮像物を定点からカメラ2で撮像して当該被撮像物の濃淡画像を連続的に取得する。演算処理部4は、この点灯タイミングに同期して連続的に取得したすべての濃淡画像で、画素列毎に各画素の階調を比較して、階調の最大値となる画素と最小値となる画素との差分値を微分処理して画素列毎に微分値分布を算出し、この微分値分布から予め定められた閾値以上の画素位置をエッジ点として検出する。
(もっと読む)
凹凸形状を抽出するための画像処理方法及び画像処理装置
【課題】縦振動を引き起こしている状況下でも、凹凸形状を精度高く読取ることができるようにする。
【解決手段】凹凸形状が施され且つ該凹凸形状の凹凸方向に沿った振動を起こしている刻印面から、凹凸形状を抽出するための画像処理方法であって、刻印面に対して一方向に走査することで、凹凸形状の高さデータを有する2次元形状データを取得する走査ステップと、高さデータの変化度合いを求めるために、2次元形状データを微分する微分ステップと、微分ステップの結果を基に、2次元形状データから高さデータの変化度合いが急峻なものを除去するスパイク除去ステップと、スパイク除去ステップの結果を積分して振動波形を推定する積分ステップと、2次元形状データから、積分ステップで推定した振動波形を減じることで凹凸形状に相当する刻印波形を算出する凹凸検出ステップとを有する。
(もっと読む)
2層円形位置ずれ測定装置
【課題】2層円形の位置ずれ量を測定する際に、安定して2層の円形重心を検出し、検出した2つの円形の重心から2層円形のずれ量を算出し2層円形の位置ずれを測定可能にする2層円形位置ずれ測定装置を提供する。
【解決手段】全体として2以上の層を有する円形の物体を上方から撮像する撮像手段と、検査エリアと検査エリアの中心を設定する手段と、外側円の複数のエッジ検出範囲を設定する手段と、外側円の複数のエッジを検出する手段と、外側円の仮重心を求める手段と、外側円の重心を求める手段と、内側円の複数のエッジ検出範囲を求める手段と、内側円の複数のエッジを検出する手段と、内側円の仮重心を求める手段と、内側円の重心を求める手段と、外側円の重心と内側円の重心から外側円と内側円の位置ずれ量を算出する手段とを備えたことを特徴とする2層円形位置ずれ測定装置。
(もっと読む)
回転推定装置、回転推定方法およびプログラム
【課題】3次元画像において画像が低品質で基準となる面に目印となるものが無くても撮像系の回転やその時間変動の推定を可能とする。
【解決手段】回転推定装置は、撮像装置が複数のタイミングで撮像した複数の3次元の画像を受け付け、前記複数の画像に共通に存在する面領域を検出し、前記画像ごとに、当該画像に基づいて、当該画像内の前記面領域に対する前記撮像装置の相対的な姿勢を求める姿勢判定手段と、前記画像ごとに求められた前記撮像装置の相対的な姿勢に基づいて、前記撮像装置の回転状態を求める回転状態推定手段と、を含む。
(もっと読む)
認識処理方法およびこの方法を用いた画像処理装置
【課題】認識精度を確保しつつ、一定の時間内に対象物を認識する処理を終了する。
【解決手段】認識対象物のモデルの特徴点群から各辺の長さが所定の基準値を満たす三角形を抽出し、モデル三角形として登録する。認識対象物の2次元画像から抽出された特徴点群についても同様に、基準値を満たす三角形を抽出して比較対象三角形として登録する。つぎにモデル三角形と比較対象三角形とを順に対応づけ、頂点の対応関係を複数とおりに設定して、対応づけられた頂点(AとA´、BとB´、CとC´)の座標を用いて、両三角形の対応関係を表す変換パラメータを算出する処理と、モデルの特徴点群と対象物の特徴点群との関係に対する当該変換パラメータの適合度を求める処理とを実行する。そして、対応づけ毎に求められた適合度に基づいてモデルの特徴点群と認識対象物の特徴点群との対応関係を示す変換パラメータを特定することによって、対象物を認識する。
(もっと読む)
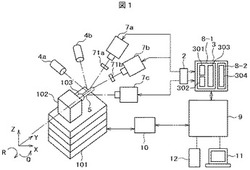
3次元形状計測用撮影装置および方法並びにプログラム
【課題】被写体にパターン光を照射することにより取得した画像を用いて、被写体の3次元形状を正確に計測する。
【解決手段】第1のカメラ2により被写体のプレ画像を取得し、演算部5がプレ画像上に複数の領域からなる照射範囲を設定する。さらに、照射範囲の領域毎にパターン光照射の有無を判定し、判定結果に応じてプロジェクタ4の変換部12にパターンを表示する。これにより、光源11をオンとすると、被写体の必要な部分にのみパターン光が照射される。被写体におけるパターン光の反射光は、第1および第2のカメラ2,3に入射する。そして、第1および第2のカメラ2,3が基準画像および参照画像を取得し、演算部5が画素の対応付けを行うことにより、被写体の3次元形状を計測する。
(もっと読む)
車両用物体検出装置
【課題】遠方まで連続する連続物体を精度よく検出可能な車両用物体検出装置を提供する。
【解決手段】ECUは、カメラで撮像された画像を構成する各点の中から、路面からの上下方向距離に基づいて、路面上の物体を構成する点を抽出し、抽出された点を、各対応点の前後方向距離及び車幅方向離に基づいて、車体前後方向と車幅方向とで規定される平面上にマッピングし、前後方向距離が所定前後距離以下の点の中から、略車両前後方向に並ぶ点列を抽出し、マッピングされる平面上において、該点列を規定する近似曲線を導出し、前後方向距離が所定前後距離以上の点の中から、近似曲線との間の車幅方向の距離が所定車幅距離未満の点を、近距離連続点列に連続する遠距離連続点列として抽出し、近距離点列及び遠距離連続点列を、車体前後方向に延びる連続物体と推定する。
(もっと読む)
1 - 20 / 42
[ Back to top ]